点云拟合和平面参数
- 一、平面拟合:特征值法和SVD法
- 二、平面参数化
- 1)Hesse形式
- 2)球坐标
- 3)最近点
- 4) 单位四元数
- 三、直线拟合
一、平面拟合:特征值法和SVD法
平面方程如下,n是法向量,d是截距

当多个点拟合平面时,需要求解下述最小二乘问题

取齐次坐标

最小二乘问题可以表示成如下矩阵形式

转换为通用的线性代数问题:对任意矩阵A,寻找x,使得Ax最小化,其中
求解的问题可以表示为

A
T
A
A^TA
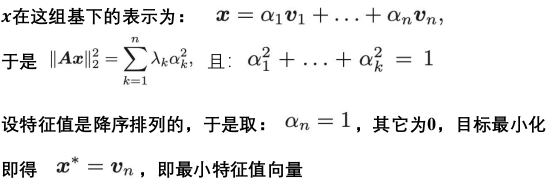
ATA是实对称矩阵,可以对角化,因此可以进行如下特征值分解

对角特征值矩阵,这里认为它们按照从大到小的顺序排列,则:
上面问题也可用SVD分解来解释,A不论什么矩阵形式,都可以进行SVD分解

带入最小二乘问题得到

注意:这里奇异值的平方等于
A
T
A
A^TA
ATA的特征值,V和特征值分解的V是一样的,两种方法等价。
二、平面参数化
平面实际上只有3个自由度,这里介绍不同的平面参数化形式,拟合时不需要考虑参数化形式,但如果想对平面进行优化或者将其加入
1)Hesse形式
最常见的一个参数化形式就是Hesse形式,用一个平面的单位法向量和距原点的距离d组成的向量表示:

但存在过参数化问题,平面实际上只有3个自由度,但是Hesse形式有4个参数,导致过参数化知乎,优化过程中计算出的Hessian矩阵不会满秩,不能求逆,解决方法是LM提供正则化。但收敛度会变慢。
2)球坐标
平面的Hesse参数化形式可以被分成两个部分,一个单位法向量部分和一个距离部分。平面的Hesse形式的过参数化就是因为单位法向量部分有3个参数,但是实际只有两个自由度导致的。那么我们就可以从这个法向量着手解决过参的问题。单位法向量可以被看成是一个单位圆球上的一点。那么我们就可以用两个角度 θ和Θ来参数化点,从而表示出这个单位法向量。那么我们就可以把Hesse形式变化成如下的形式:

但是这种形式的参数化虽然是最小参数化形式,但在优化的时候会产生奇异性。
3)最近点
这种方式是用在平面上距离当前表示坐标系原点最近的3D坐标点来表示平面。这种表示方式有两个优点:1.是最小化参数形式;2.具有真实的物理意义。

4) 单位四元数
直接上论文:The homogeneous plane representation is over- parametrized and therefore requires some special care during optimization—we will apply a similar solution as is commonly used for quaternions, and therefore start with a review of the quaternion case.

细节比较多,参考论文:Simultaneous Localization and Mapping with Infinite Planes
三、直线拟合
我们使用直线上一点再加上直线方向矢量来描述直线,直线上的点 x 满足方程:

d为直线的方向,满足 ||d∥ = 1;p为直线 l 上某个点,t 为直线参数。我们想求的是d和p,共 6 个未知数。显然,当给定的点集较大时,这依然是一个超定方程,需要 构造最小二乘问题进行求解。
对于任意一个不在 l 上的点
x
k
x_k
xk,我们可以利用勾股定理,计算它离直线垂直距离的平方