十六、重复控制基本原理
16.1 重复控制理论
重复控制方法的目标是设计一个针对周期信号的跟踪控制器或者扰动补偿器,只需基于过去周期的误差信号,除了使用当前控制误差外,还“重复”使用了上一周期的误差,并与当前控制误差叠加在一起,作为偏差控制信号。重复控制方法能够大大提高系统跟踪周期信号的能力,抑制周期性的干扰,具有较好的跟踪鲁棒性能。
重复控制最直接的解决方案是应用内模原理构造内模控制器。在控制器中包含周期信号的模型,以获得无差的渐近跟踪特性。如果输入信号模型具有无穷的谐波成分,例如方波信号,则控制器必须包含无穷维的信号模型。在知道信号周期的情况下,通过具有延迟环节的正反馈回路形成信号模型,能够获得信号中的各种谐波频率成分。
重复控制方法的出现,为伺服系统的设计及解决重复轨迹高精度跟踪问题提供了新的手段。并且其在机器人控制中有着较好的应用前景。
重复控制方法是内模原理的一种应用,内模原理是指:如果控制系统的开环传递函数包含参考信号的模型,那么, 系统闭环输出的稳态误差为零。例如,型反馈系统跟踪
阶参考输入信号无稳态误差,是因为其开环传递函数中包含了
,恰好是
阶输入信号的模型。
对于周期性指令输入或干扰,如果将周期信号的产生模型引入到系统闭环中,根据内模原理,便可实现重复控制。从频域的角度来看,重复控制方法是内模原理的一种应用,适于跟踪周期信号或抑制周期干扰。
周期信号的产生模型如下图1所示,周期信号通过一个纯延迟环节(延迟
秒)构成正反馈,形成周期为
,波形如
的周期信号。
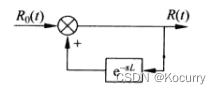
图1 周期信号发生器
由上图可知,
则该信号模型的传递函数为:
考虑一个SISO线性时不变系统,设被控对象为。将图1中的周期信号模型串联到控制回路中,构成基本重复控制系统,如图2所示。
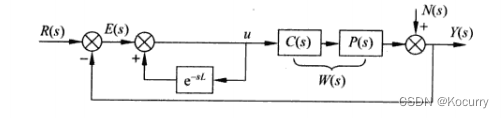
图2 基本重复控制系统
图2中,为基本控制器,
为周期参考信号,周期为
,
为相同周期的干扰信号。通常称闭环系统
为基本系统。
图2中周期信号模型的前向通道是一个纯延迟环节,对闭环系统特性不利。因此,如果给周期信号模型并联一个前向通道,其上串比例环节或稳定的传递函数,则有利于改善系统的稳定性和快速性。
这里,对基本重复控制系统稳定性分析不在赘述。
16.2 仿真实例
被控对象为:
设计基本控制器为:
指令信号由频率为,幅值为0.5的正弦信号。为保证
,重复控制回路的延迟时间为
。仿真系统和结果如下图所示:
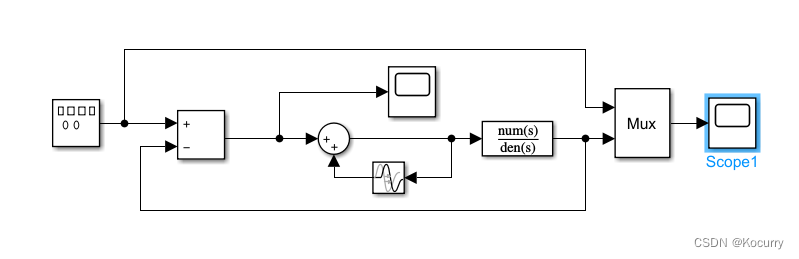
图 3 重复控制系统图

图4 仿真结果
由上图可以看出,黄色曲线是信号发生器产生的信号,蓝色曲线是经过传递函数的信号。两种信号较为贴合,可以判断设计的重复控制器的控制效果较好。