1、关于矩阵的一些想法
有小伙伴看到矩阵就脑瓜壳疼,那是没有了解数学家为啥闲的没事要用矩阵呢,从来没有人说不用矩阵就算不了,矩阵最初我认为是数学家偷懒,因为写一堆方程字太多太长,所以用了简写的形式,后来又有大佬发现简写后变成了一堆数字了,那是不是有啥规律呢,慢慢研究发展成了一门学科,当你方程组写多了时候,用矩阵运算真是方便啊。但是不管矩阵在怎么变,他也只能解决线性系统,什么是线性系统,即满足其次性又满足叠加性的系统。其实归根到底还是在解方程。入门教程有的线性系统大多是2元或者3元,初学者可能看不出来写成矩阵有啥优势,直接解方程组不香吗?但是实际应用中系统大多是3元以上,3元以解个方程组还勉强可以,那10元呢,20元呢,是不是就不香了。打破旧的思想桎梏,才能更上一层楼,多看几遍,复习复习概率和线性代数,卡尔曼滤波真没用啥高级技能。
2、卡尔曼滤波原理简单理解

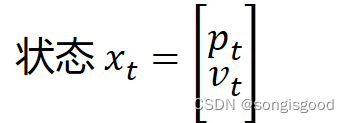

![]()
上述两个公式用于描述小车的状态方程,将该方程组转换成矩阵形式


公式1-3可以写成矢量形式 (公式上面的尖冒号表示的是估计值不是真实值,减号表示有欠缺不是最好的)
![]()


Q表示预测噪声
![]()

观测矩阵
![]()
![]()
![]()
![]()
![]()
状态更新
![]()
![]()
![]()
噪声协方差矩阵的更新
![]()

3、重要的总结
1、核心思想就是根据噪声协方差,计算相关加权值,核心思想看下一条。
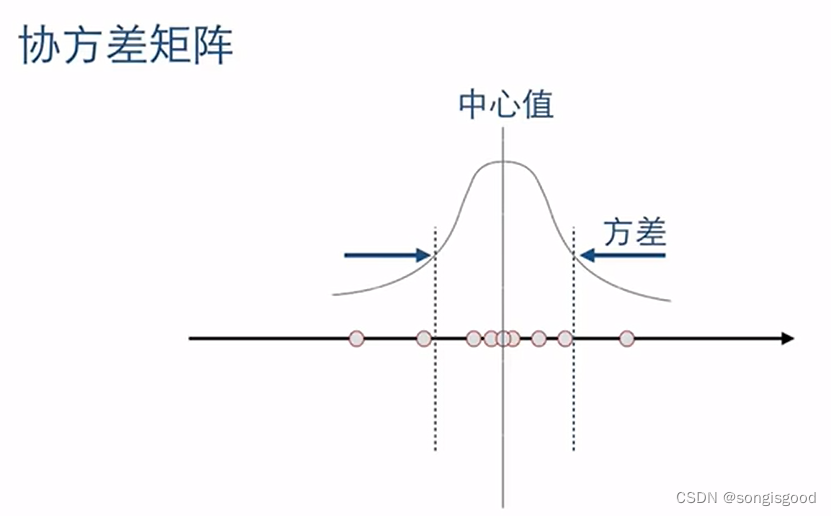
2、反复迭代能收敛的原因是,噪声协方差满足高斯分布,状态矩阵噪声和观测矩阵噪声相乘就是最优估计的噪声矩阵 满足高斯分布,高斯分布的特性是两个高斯分布相乘产生的新高斯分布,新高斯函数的方差会小于任意相乘高斯函数的方差,看上图协方差矩阵。所以迭代一次方差比上一小,所以反复迭代,最终收敛到真实值附近。