双轮差速模型
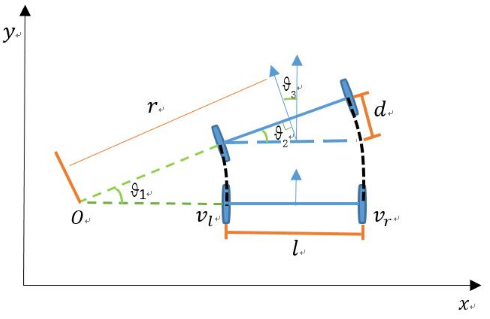
移动距离
delta_dist = (encoder_right + encoder_left)/linesNum * circumference / 2;旋转角度
Delta_th = (float)(encoder_right - encoder_left) / wheel_track;将移动距离转换到车体坐标系
delta_x = cos(delta_th) * delta_dist;
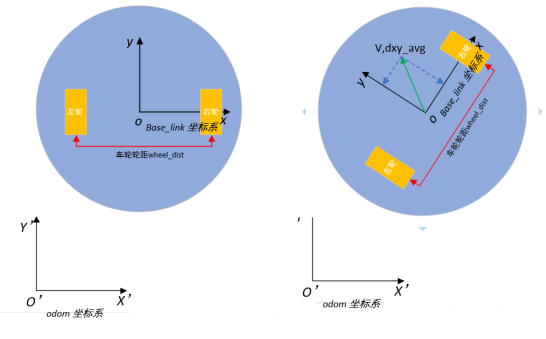
delta_y = -sin(delta_th) * delta_dist;从车体坐标系转到世界坐标系
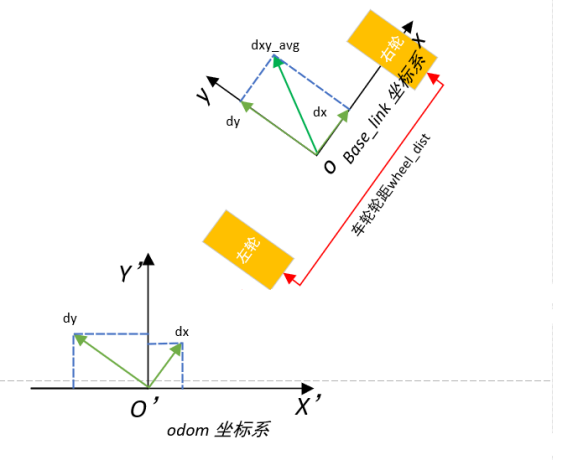
pos_x += (cos(th) * delta_x - sin(th) * delta_y);
pos_y += (sin(th) * delta_x + cos(th) * delta_y);安装ros串口
sudo apt-get install ros-melodic-serial
delta_dist = (encoder_right + encoder_left)/linesNum * circumference / 2;
Delta_th = (float)(encoder_right - encoder_left) / wheel_track;
// delta_speed = delta_dist / dt;
delta_x = cos(delta_th) * delta_dist;
delta_y = -sin(delta_th) * delta_dist;
th += delta_th;
pos_x += (cos(th) * delta_x - sin(th) * delta_y);
pos_y += (sin(th) * delta_x + cos(th) * delta_y);Circumference 为轮周长
linesNum为一圈的脉冲数=变比*脉冲数
Wheel_track
假设 轮子的周长为circumference
轮距为whell_dist
那么小车原地旋转一周的走过的路径为pi * whell_dist,小车的姿态变化为360度。
小车转的圈数为cylinder_num = pi * whell_dist / circumference
所产生的脉冲数为 total_num = cylinder_num * linesNum * 2
所以对应小车姿态变化一度为total_num / 360
姿态转化为odom
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(th);
odom.pose.pose.position.x = pos_x;
odom.pose.pose.position.y = pos_y;
odom.pose.pose.position.z = 0;
odom.pose.pose.orientation = odom_quat;
![[数据结构 -- 手撕排序第一篇] 插入排序](https://img-blog.csdnimg.cn/img_convert/9307f43d5e8f827ef7bf2a2349afa6f8.png)