文章目录
- 一、新建工程模板——寄存器版本
- 二、HAL入门
- 1.固件库和寄存器的区别
- 2.STM32CubeF4
- 3.HAL库包介绍
- 三、新建HAL库工程模板
一、新建工程模板——寄存器版本
- 开发环境:MDK5
- 软件包:STM32CubeF4包
新建工程模板的一般步骤为:
-
新建工程目录,复制需要的文件到工程目录
首先,打开MDK软件。然后点击Project->New uVision Project
弹出如图所示界面:
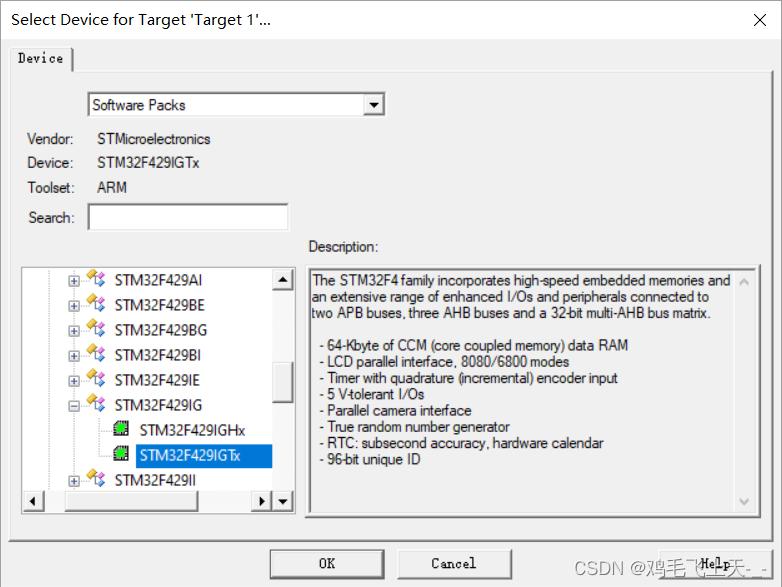
之后,弹出选择器件的对话框,如图所示。因为ALIENTEK阿波罗STM32F429开发板所使用的STM32型号为STM32F429IGT6,所以在这里我们选择:STMicroelectronics->STM32F4 Series->STM32F429->STM32F429IG->STM32F429IGTx

点击 OK,MDK会弹出Manage Run-Time Environment对话框,如图所示:
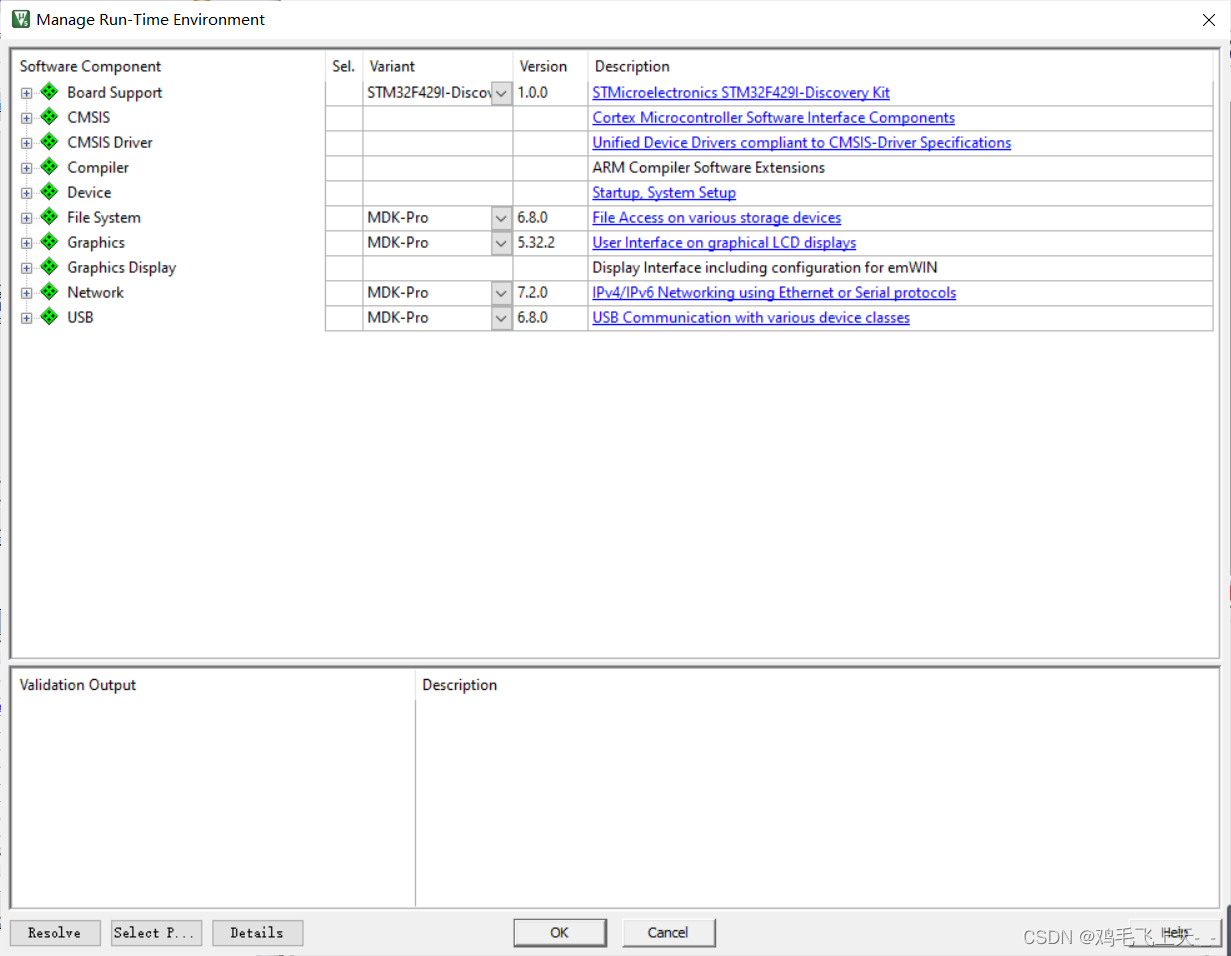
这是MDK5新增的一个功能,在这个界面,我们可以添加自己需要的组件,从而方便构建开发环境,不过这里我们不做介绍。所以在图中所示界面,我们直接点击Cancel,即可,得到如下界面。
到这里,我们还只是建了一个框架,还需要添加启动代码,以及.c文件等。需要引入下面文件
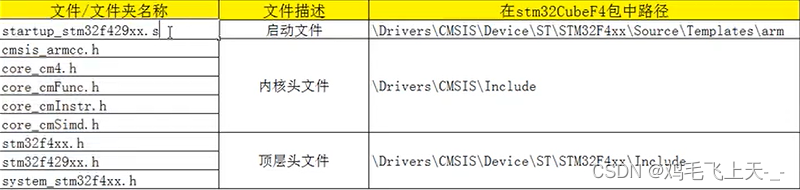
启动文件放入USER文件夹,头文件放入CORE文件夹。
-
把工程需要的文件添加到工程
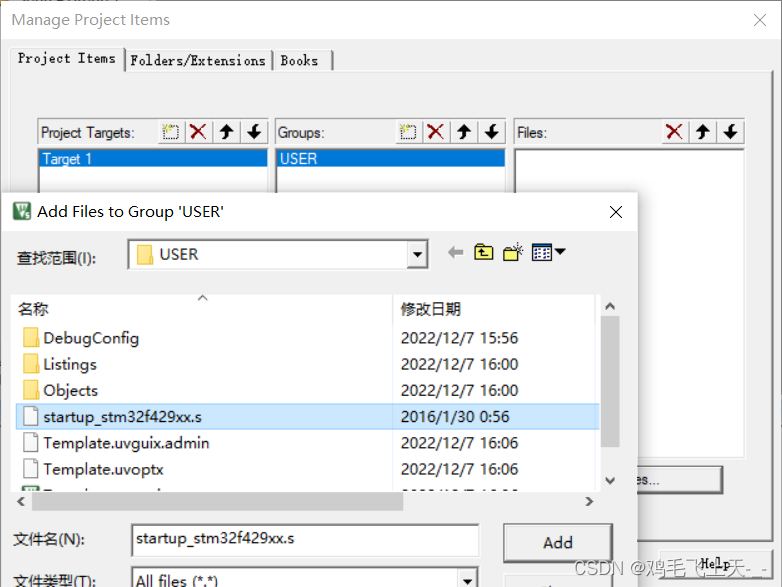
启动代码是一段和硬件相关的汇编代码。是必不可少的!这代码主要作用如下:1、堆栈(SP)的初始化;2、初始化程序计数器(PC);3、设置向量表异常事件的入口地址;4、调用 main 函数。
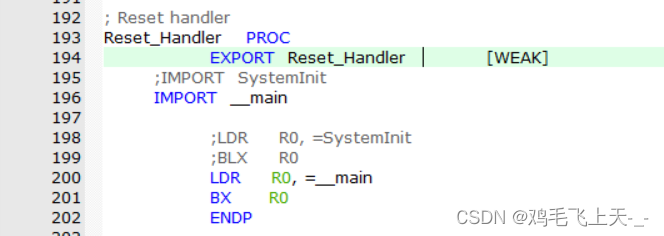
这个启动文件,修改了Reset_Handler 函数,该函数修改后代码如下:; Reset handler Reset_Handler PROC EXPORT Reset_Handler [WEAK] ;IMPORT SystemInit //寄存器代码,不需要在这里调用 SystemInit 函数, //故屏蔽掉,库函数版本代码,可以留下. //不过需要在外部实现 SystemInit 函数,否则会报错. IMPORT __main LDR R0, =0xE000ED88 // 使能浮点运算 CP10,CP11 LDR R1,[R0] ORR R1,R1,#(0xF << 20) STR R1,[R0] ;LDR R0, =SystemInit //寄存器代码,未用到,屏蔽 ;BLX R0 //寄存器代码,未用到,屏蔽 LDR R0, =__main BX R0 ENDP这段代码,我们主要加入了开启
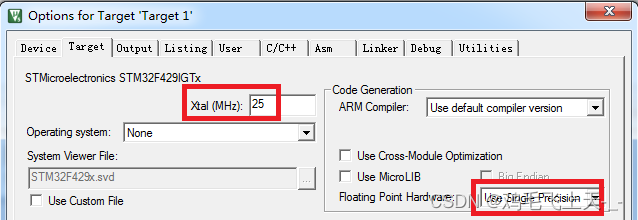
STM32F429硬件FPU的代码,以使能STM32F429的浮点运算单元。其中,0xE000ED88就是协处理器控制寄存器(CPACR)的地址,该寄存器的第20~23位用来控制是否支持浮点运算,这里我们全设置为 1,以支持浮点运算。
特别注意:我们在汇编代码里面使能了FPU,所以在MDK里面,我们也要设置使用FPU,否则可能代码会无法运行,设置方法如下:选择Options for Target ‘Target1’,打开Target选项卡,在Code Generation里面,选择Use Single Precision,如图所示:
-
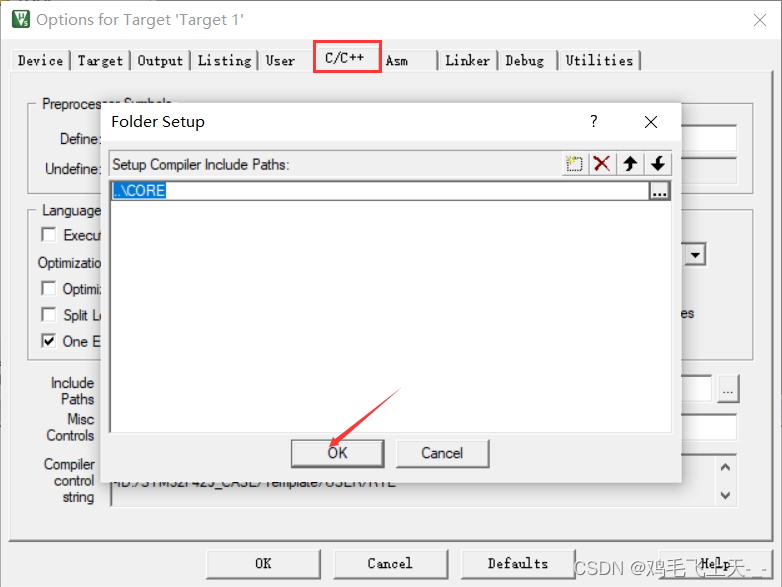
在
MDK中设置把头文件存放路径
-
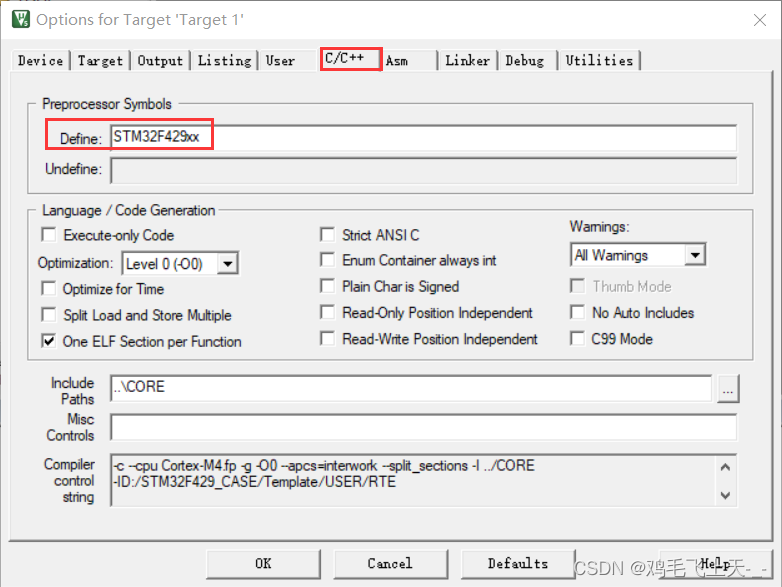
配置
MDK:全局宏定义等
重要的预编译全局宏定义标识符:STM32F429xx
-
编写用户函数
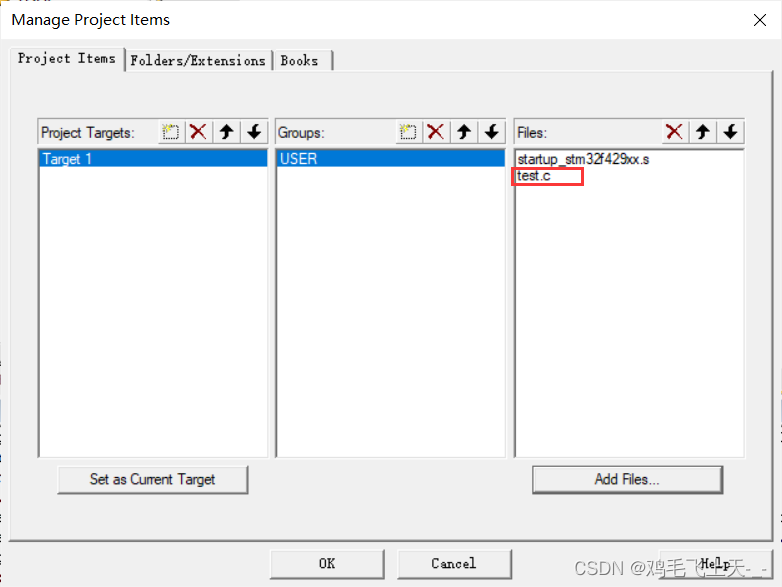
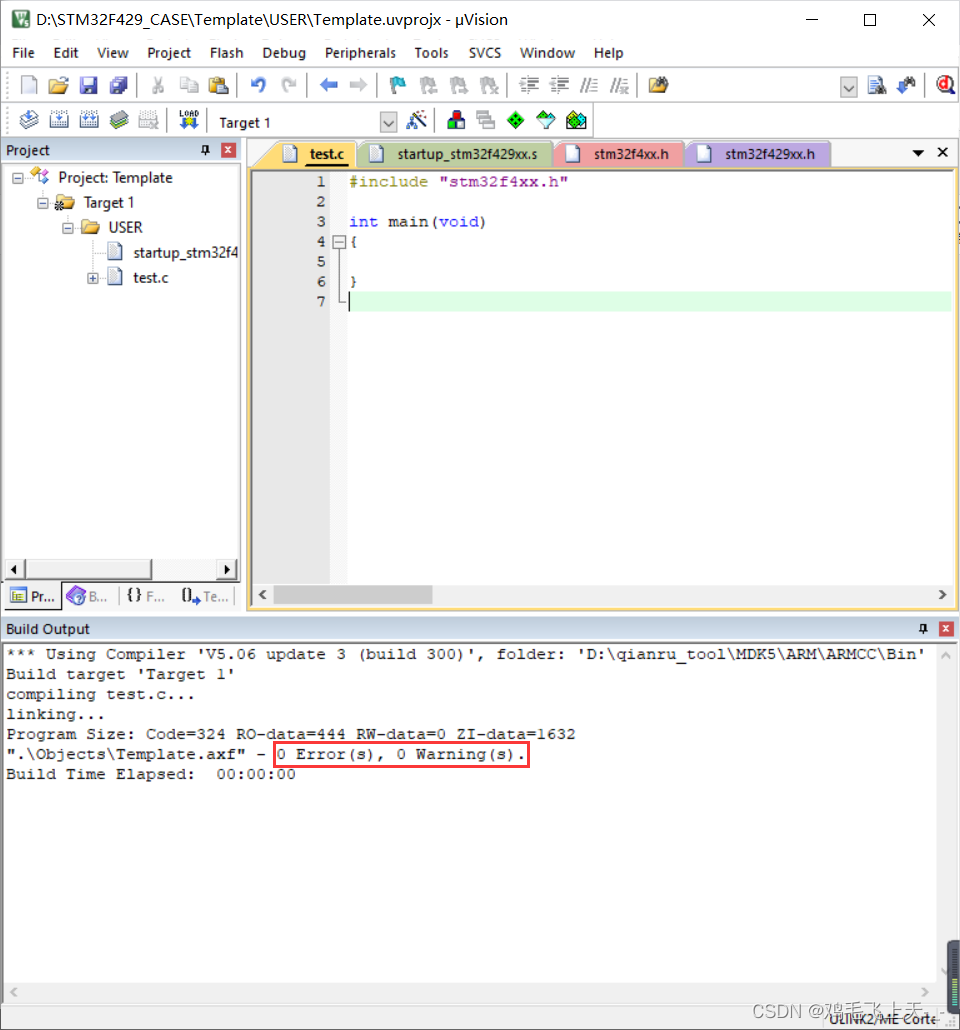
新建test.c文件,并添加到工程组中
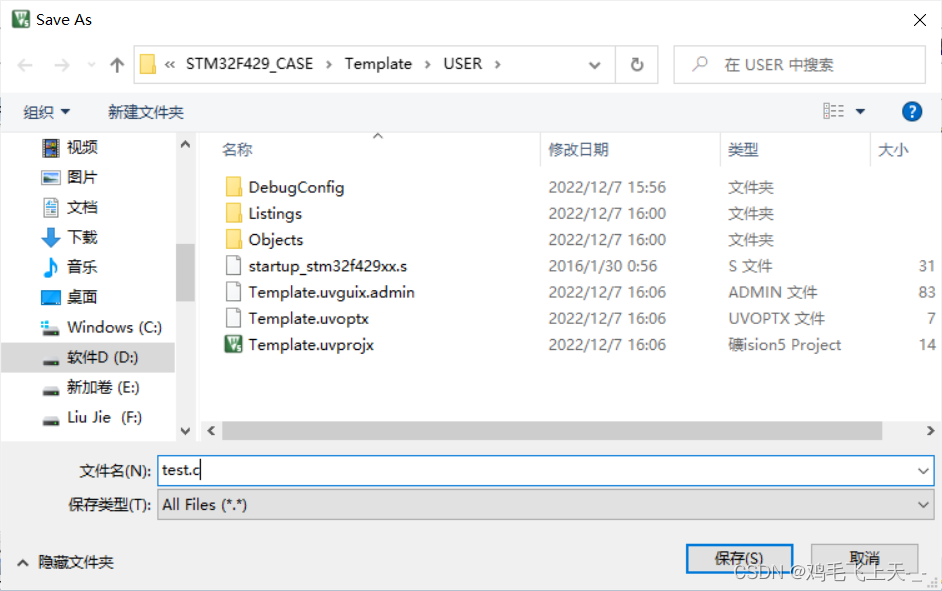
此时,编译代码有错误!
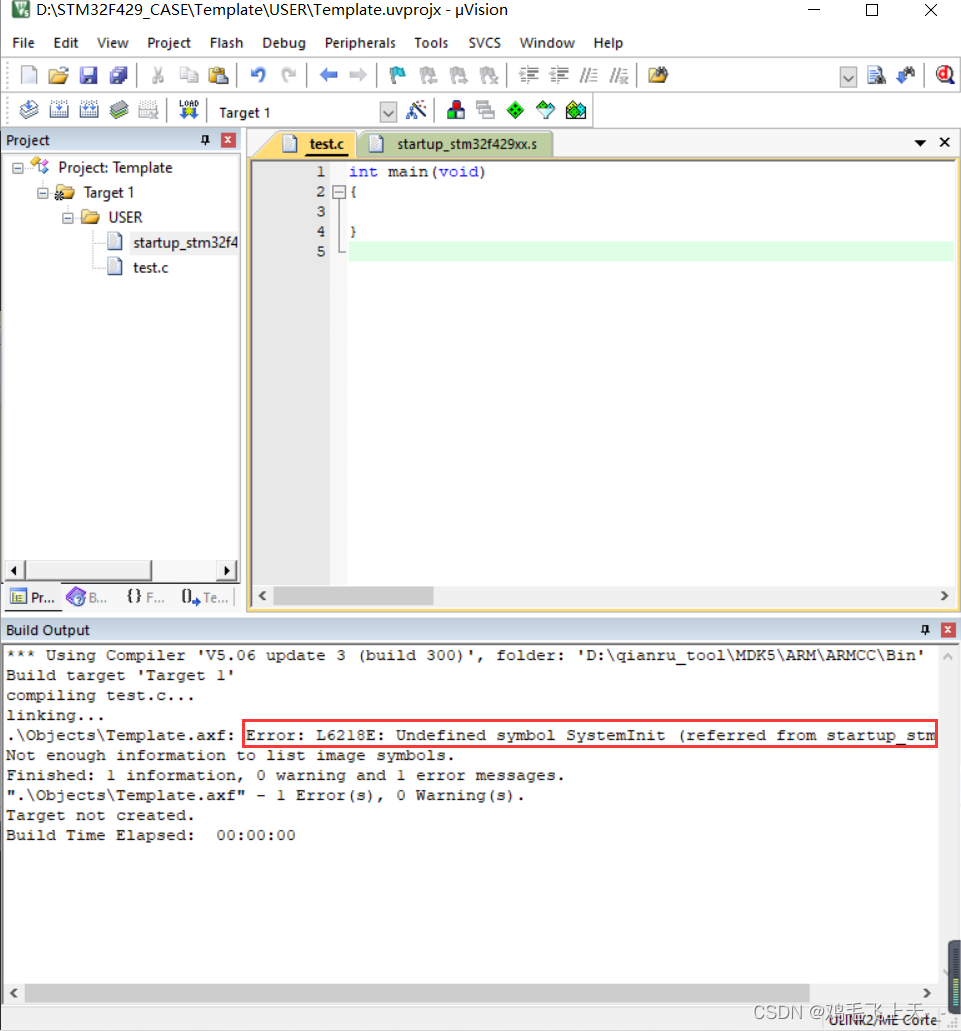
这是因为寄存器代码,不需要在这里调用SystemInit函数,故屏蔽掉。库函数版本代码,可以留下;不过需要在外部实现SystemInit函数,否则会报错。
此时,再次编译工程,没有警告,没有错误!
-
添加
ALIENTEK系统文件夹SYSTEM
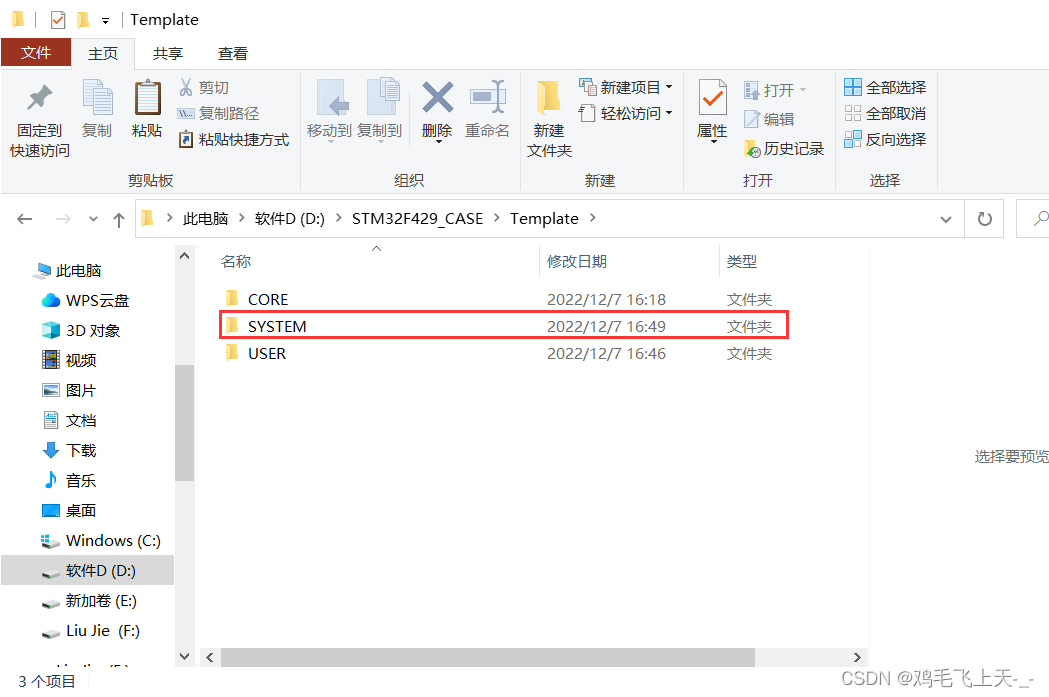
将SYSTEM中的文件添加到工程组中

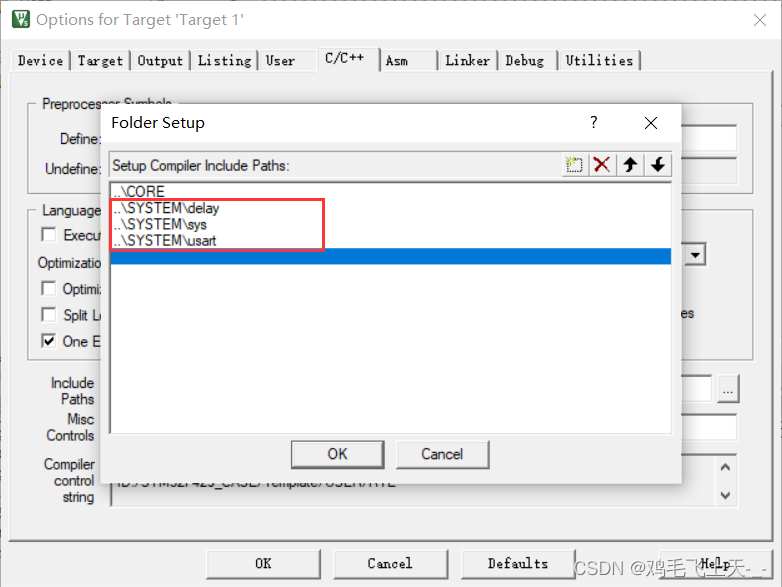
设置头文件存放路径
此时,可以删除CORE文件夹,因为SYSTEM文件夹中已经包含。
二、HAL入门
1.固件库和寄存器的区别
STM32 固件库到底是什么,和寄存器开发有什么关系?其实一句话就可以概括:固件库就是函数的集合,把寄存器操作封装起来。固件库函数的作用是向下负责与寄存器直接打交道,向上提供用户函数调用的接口(API)。
在 51 的开发中我们常常的作法是直接操作寄存器,比如要控制某些 IO 口的状态,我们直接操作寄存器:
P0=0x11;
而在 STM32 的开发中,我们同样可以操作寄存器:
GPIOF->BSRR=0x00000001; //这里是针对 STM32F4 系列
这种方法当然可以,但是这种方法的劣势是你需要去掌握每个寄存器的用法,你才能正确使用STM32,而对于 STM32 这种级别的 MCU,数百个寄存器记起来又是谈何容易。于是 ST推出了官方固件库,固件库将这些寄存器底层操作都封装起来,提供一整套接口(API)供开发者调用,大多数场合下,你不需要去知道操作的是哪个寄存器,你只需要知道调用哪些函数即可。比如上面的控制 BSRRL 寄存器实现电平控制,官方 HAL 库封装了一个函数:
void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)
{
if(PinState != GPIO_PIN_RESET)
{
GPIOx->BSRR = GPIO_Pin;
}
else
{
GPIOx->BSRR = (uint32_t)GPIO_Pin << 16;
}
}
这个时候你不需要再直接去操作BSRRL寄存器了,你只需要知道怎么使用HAL_GPIO_WritePin这个函数就可以了。
2.STM32CubeF4
STM32CubeF4 包目录结构,如下图所示:

接下来介绍一下 STM32CubeF4 中几个关键的文件夹,
-
Drivers文件夹。Drivers文件夹包含BSP,CMSIS和STM32F4xx_HAL_Driver三个子文件夹。BSP文件夹
此支持包提供的是直接与硬件打交道的 API,例如触摸屏,LCD,SRAM 以及 EEPROM等板载硬件资源等驱动。BSP 文件夹下面有多种 ST官方 Discovery开发板, Nucleo开发板以及 EVAL 板的硬件驱动 API 文件,每一种开发板对应一个文件夹。CMSIS文件夹
顾名思义就是符合 CMSIS 标准的软件抽象层组件相关文件。文件夹内部文件比较多。主要包括 DSP库(DSP_LIB 文件夹),Cortex-M 内核及其设备文件(Include 文件夹),微控制器专用头文件/启动代码/
专用系统文件等(Device 文件夹)。STM32F4xx_HAL_Driver文件夹
这个文件夹非常重要,它包含了所有的 STM32F4xx系列 HAL 库头文件和源文件,也就是所有底层硬件
抽象层 API 声明和定义。它的作用是屏蔽了复杂的硬件寄存器操作,统一了外设的接口函数。该文件
夹包含 Src 和 Inc 两个子文件夹,其中 Src 子文件夹存放的是.c 源文件,Inc 子文件夹存放的是与之对应
的.h 头文件。每个.c 源文件对应一个.h 头文件。源文件名称基本遵循 stm32f4xx_hal_ppp.c 定义格式,
头文件名称基本遵循 stm32f4xx_hal_ppp.h 定义格式。比如 gpio 相关的 API 的声明和定义在文件
stm32f4xx_hal_gpio.h 和 stm32f4xx_hal_gpio.c 中。
-
Middlewares文件夹。
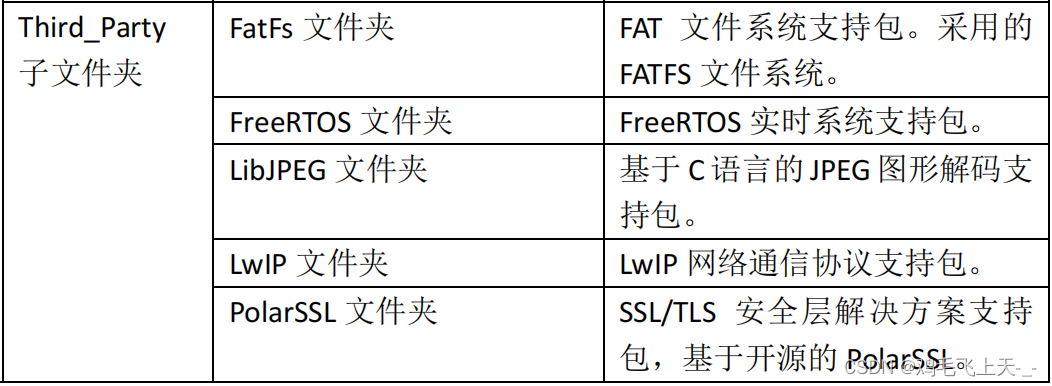
该文件夹下面有ST和Third_Party2 个子文件夹。ST文件夹下面存放的是STM32相关的一些文件,包括STemWin和USB库等。Third_Party文件夹是第三方中间件,这些中间价都是非常成熟的开源解决方案。ST文件夹
Third_Party文件夹
-
Projects文件夹。
该文件夹存放的是一些可以直接编译的实例工程。 -
Utilities文件夹。
该文件夹下面是一些其他组件,在项目中使用得不多。
3.HAL库包介绍
新建一个工程常需要以下HAL库文件:

接下来我们看看 HAL 库工程模板中各个文件之间的包含关系,
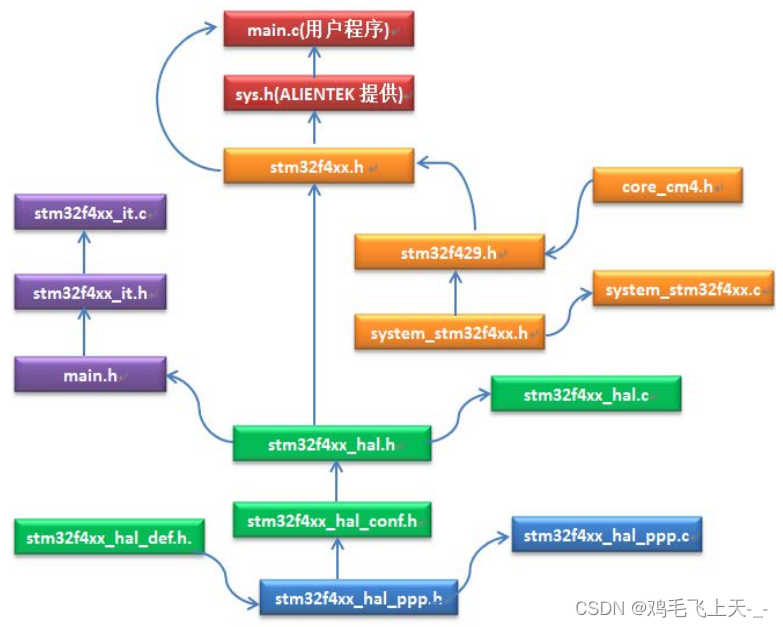
从上面工程文件包含关系图可以看出,顶层头文件 stm32f4xx.h 直接或间接包含了其他所有工程必要头文件,所以在我们的用户代码中,我们只需要包含顶层头文件 stm32f4xx.h 即可。这里我们还需要说明一下,在我们 ALIENTEK 提供的 SYSTEM 文件夹内部的 sys.h 头文件中,我们默认包含了 stm32f4xx.h 头文件,所以在我们用户代码中,只需要包含 sys.h 头文件即可,当然也可以直接包含顶层头文件 stm32f4xx.h。
三、新建HAL库工程模板
- 作用:方便编写用户代码
- 开发环境:MDK5
- 所需软件包:HAL库包
其步骤如下:
-
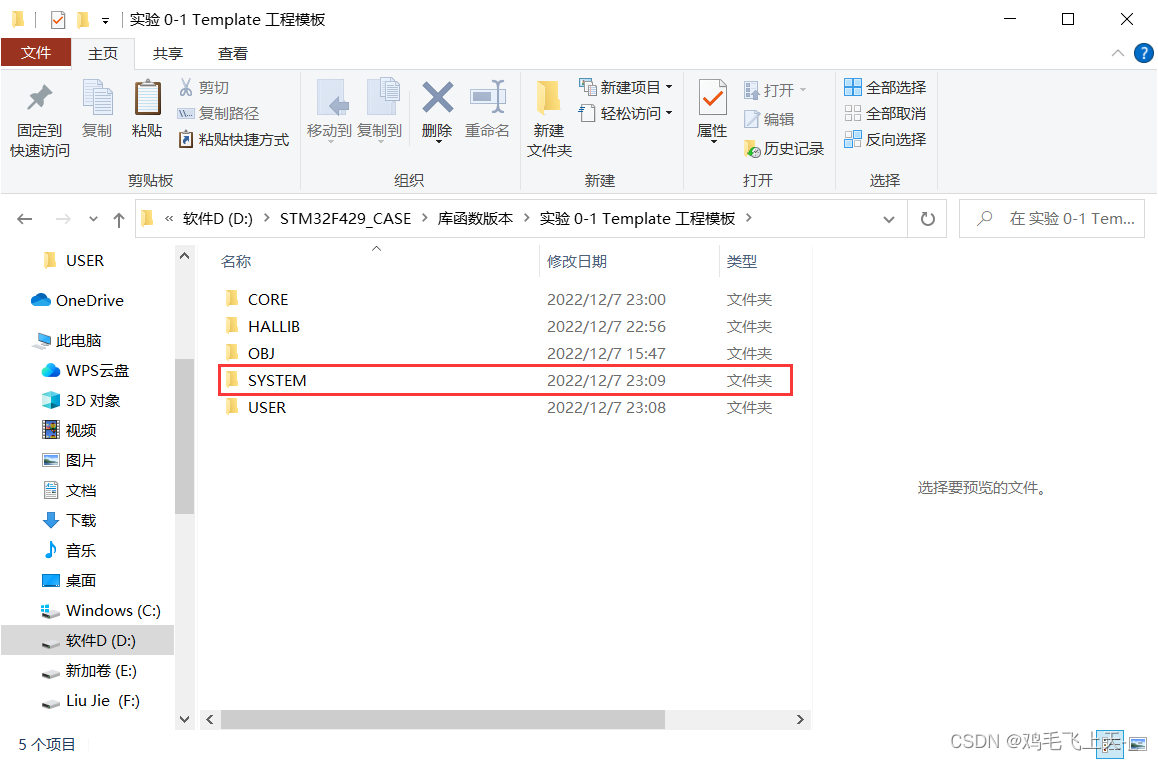
在电脑的某个目录下面建立一个文件夹,后面所建立的工程都可以放在这个文件夹下面,并新建下面 4 个子文件夹:
CORE,HALLIB,OBJ和USER。
-
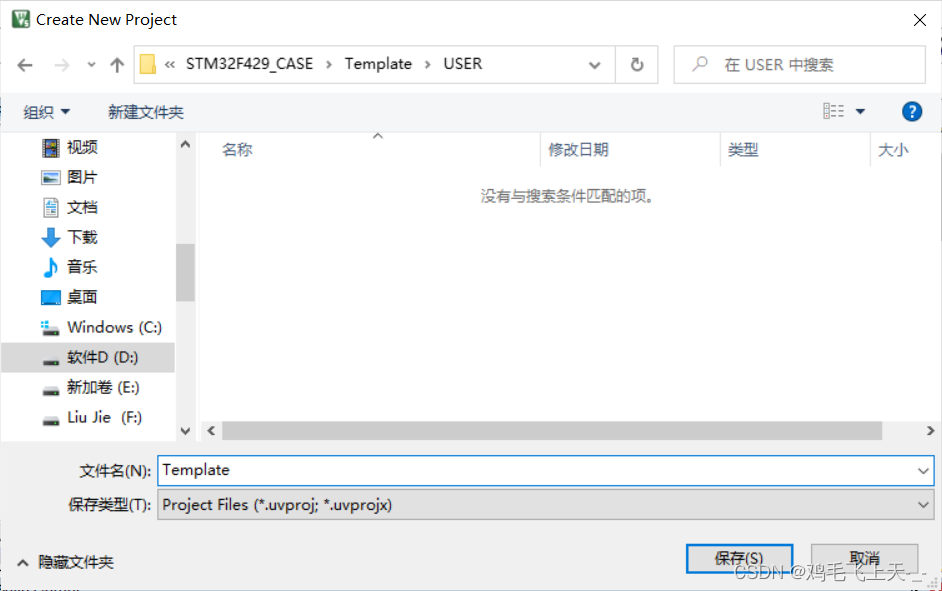
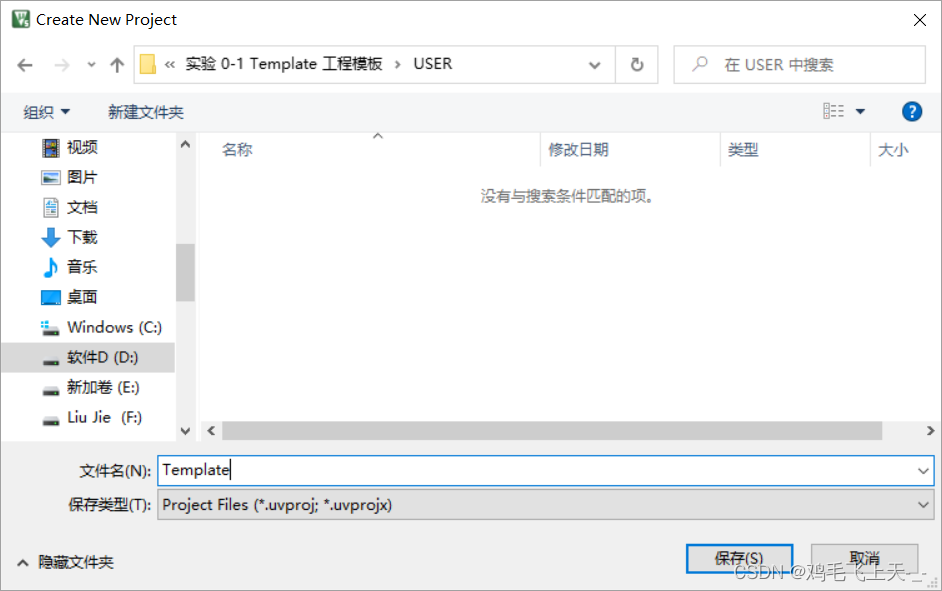
打开
MDK,点击菜单Project –>New Uvision Project,然后将目录定位到刚才建立的文件夹下的USER子目录,工程取名为Template之后点击保存,工程文件就都保存到USER文件夹下面。
接下来会出现一个选择Device的界面,就是选择我们的芯片型号。这里我们选择STMicroelectronics->STM32F4 Series->STM32F429->STM32F429IG->STM32F429IGTx。
点击 OK,MDK会弹出Manage Run-Time Environment对话框,
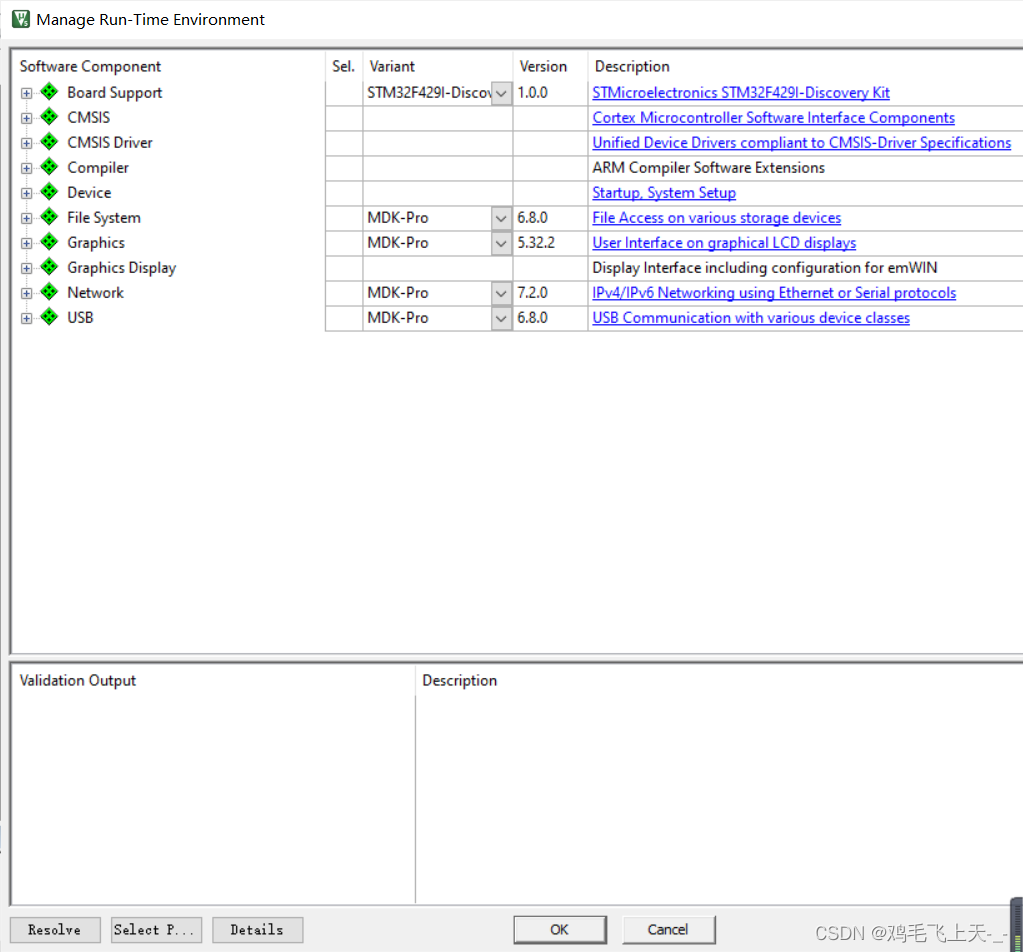
这是MDK5新增的一个功能,在这个界面,我们可以添加自己需要的组件,从而方便构建开发环境,不过这里我们不做介绍。我们直接点击Cancel即可, -
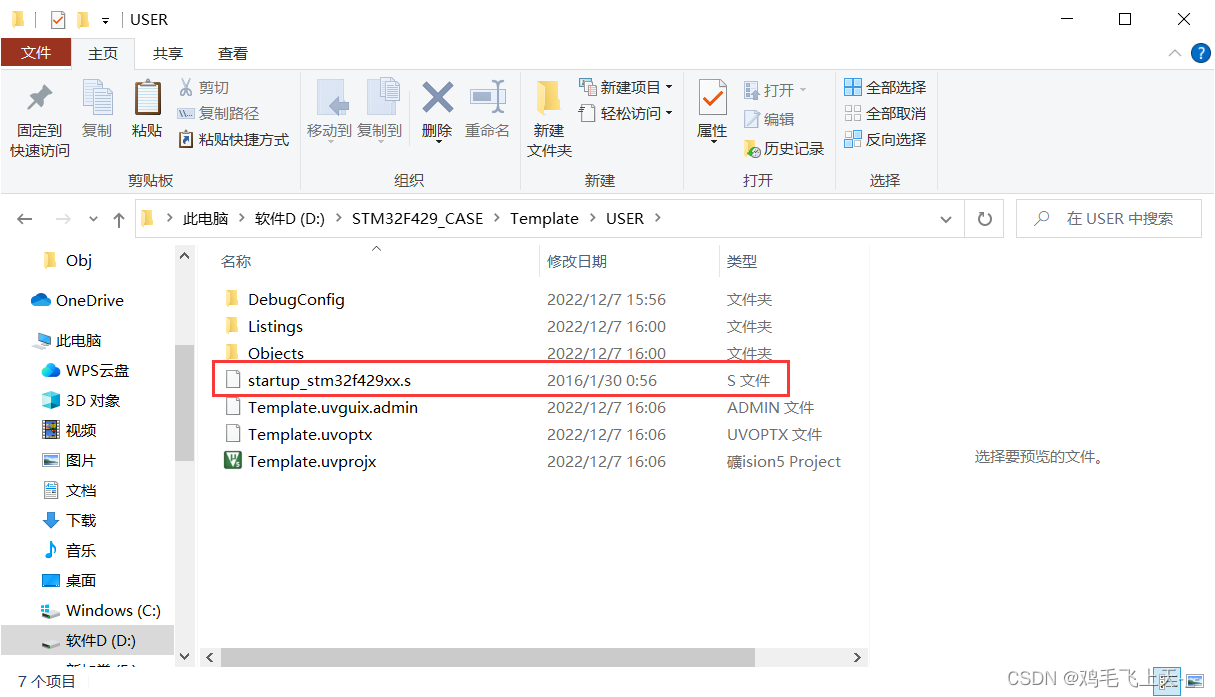
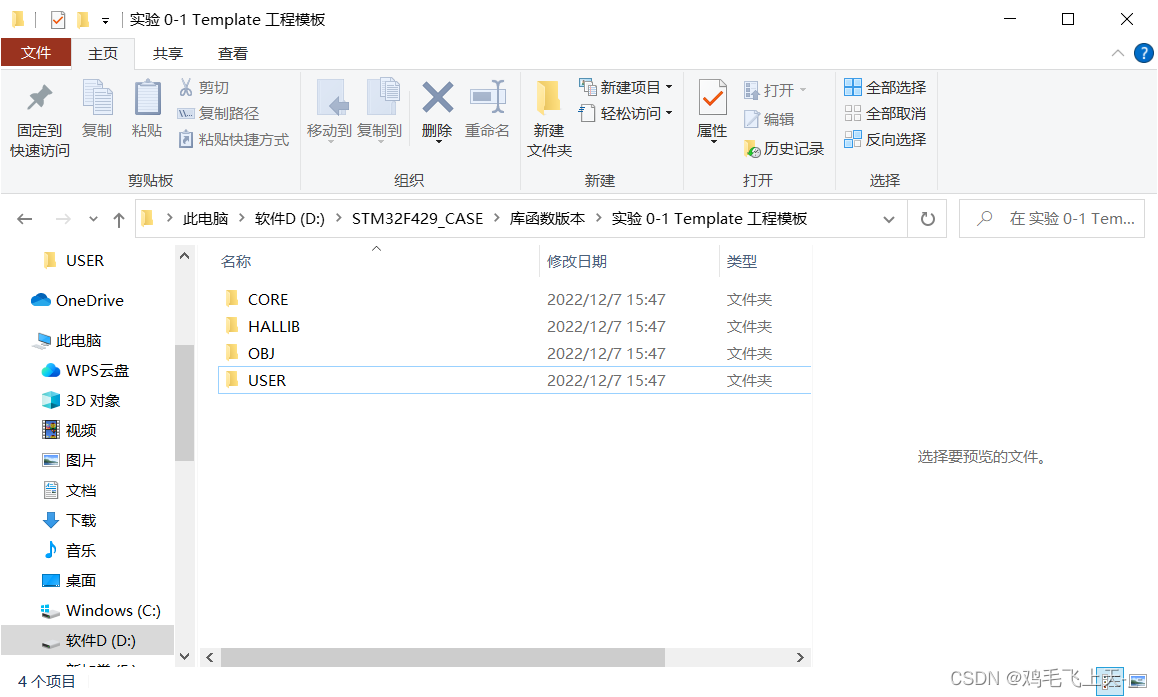
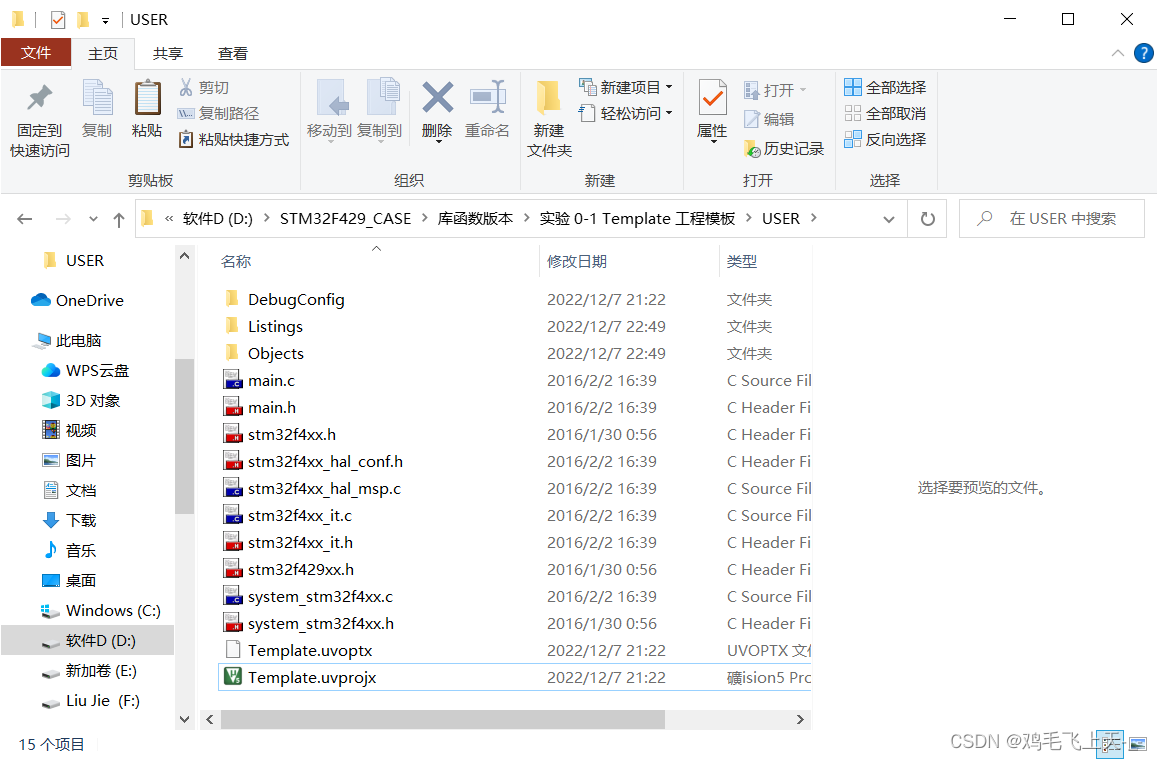
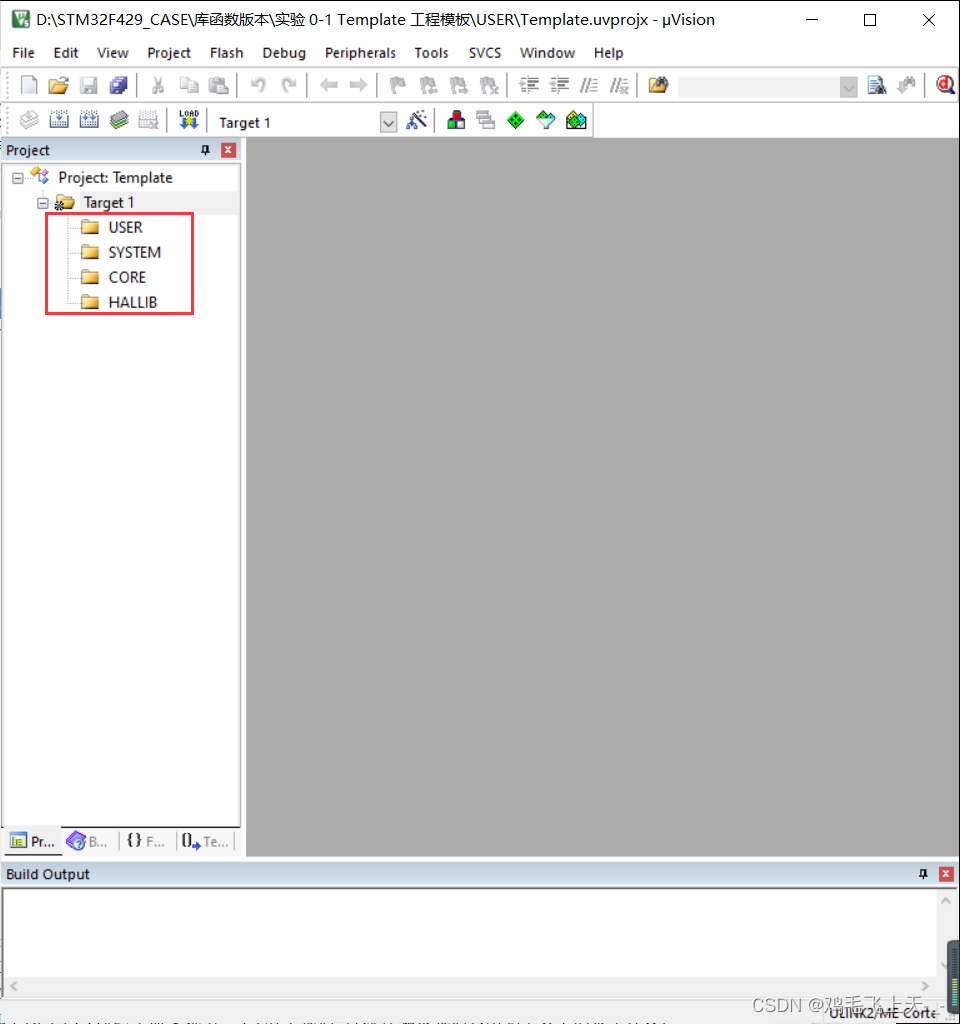
USER目录内容如下图
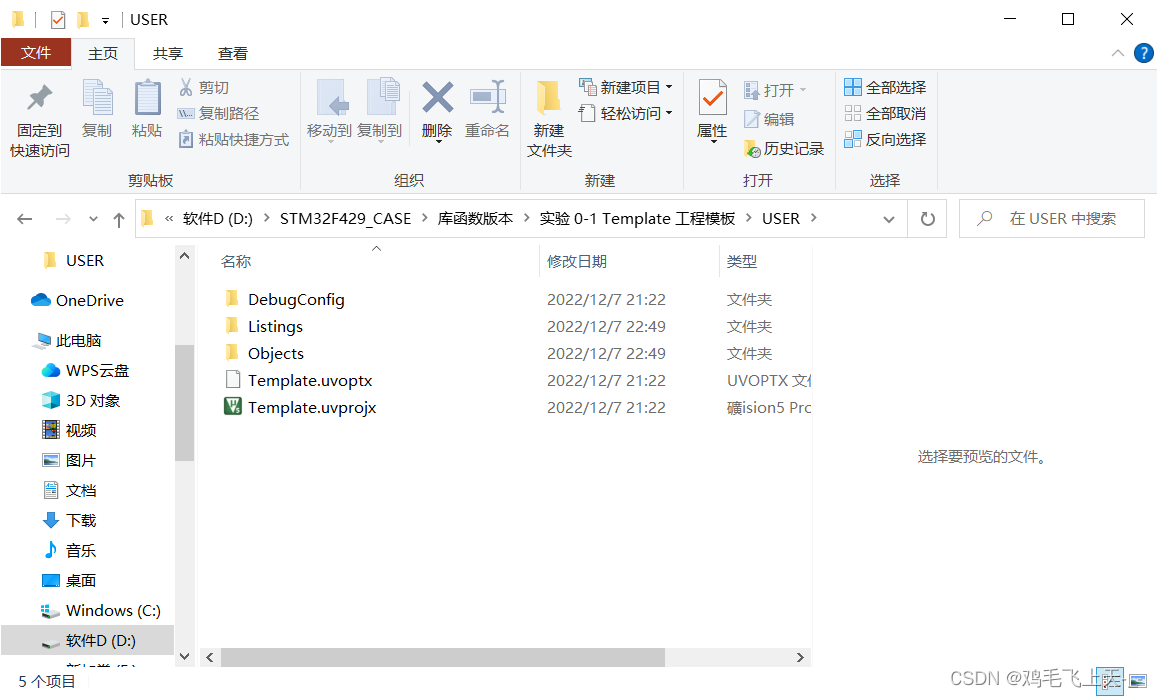
这里我们说明一下,Template.uvprojx是工程文件,非常关键,不能轻易删除。DebugConfig,Listings和Objects三个文件夹是MDK自动生成的文件夹。其中DebugConfig文件夹用于存储一些调试配置文件,Listings和Objects文件夹用来存储MDK编译过程的一些中间文件。这里,我们把Listings和Objects文件夹删除,我们会在下一步骤中新建一个OBJ文件夹,用来存放编译中间文件。当然,我们不删除这两个文件夹也没有关系,只是我们不用它而已。 -
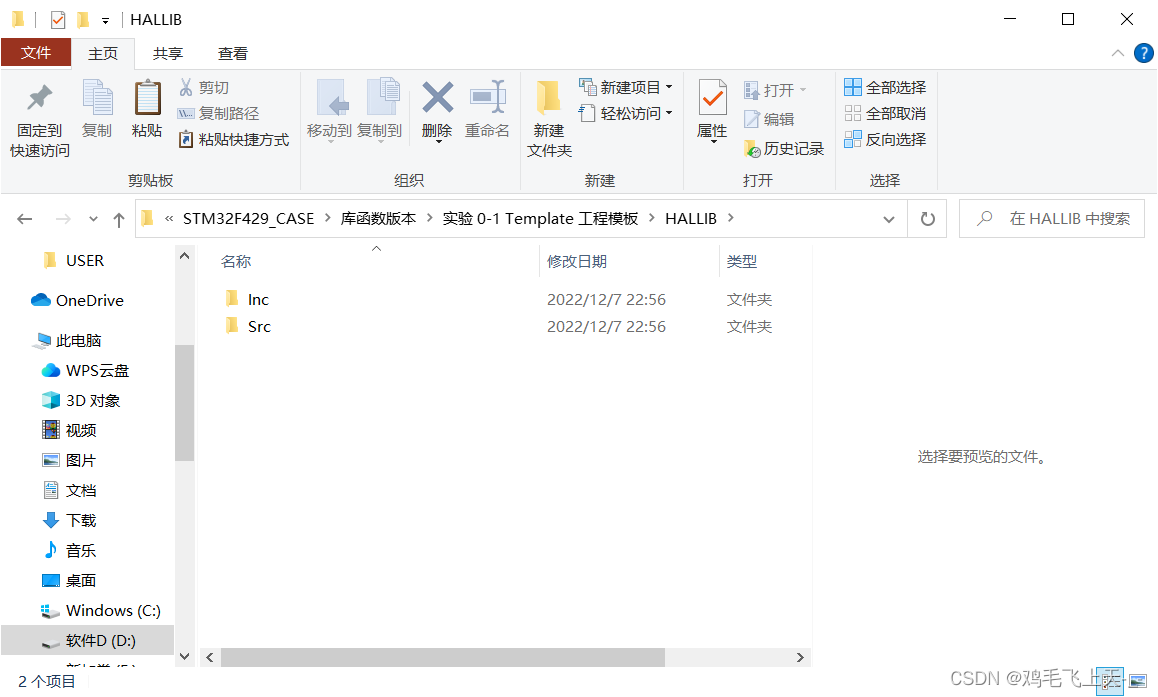
接下来我们将从官方
stm32cubeF4包里面复制一些我们新建工程需要的关键文件到我们的工程目录中。首先,我们要将STM32CubeF4包里的源码文件复制到我们的工程目录文件夹下面。打开官方STM32CubeF4包,定位到我们之前准备好的HAL库包的目录:\STM32Cube_FW_F4_V1.10.0\Drivers\STM32F4xx_HAL_Driver下面,将目录下面的Src,Inc文件夹复制到我们刚才建立的HALLIB文件夹下面。Src存放的是固件库的.c文件,Inc存放的是
对应的.h文件
-
接下来,我们要将
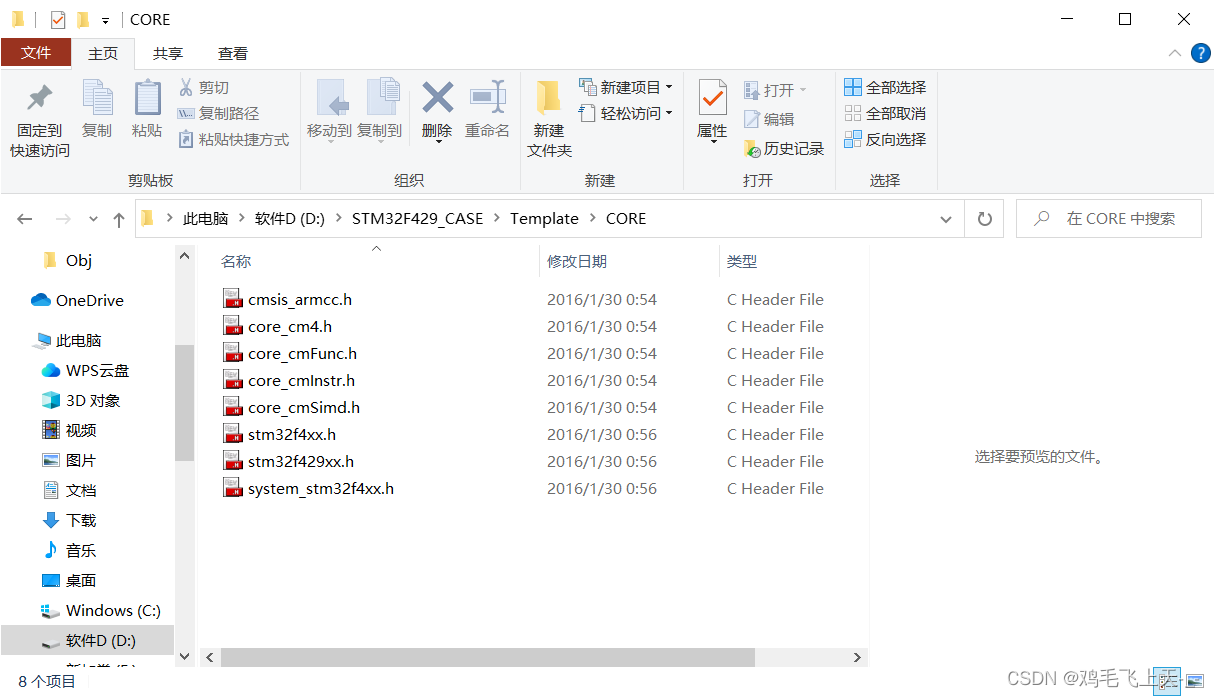
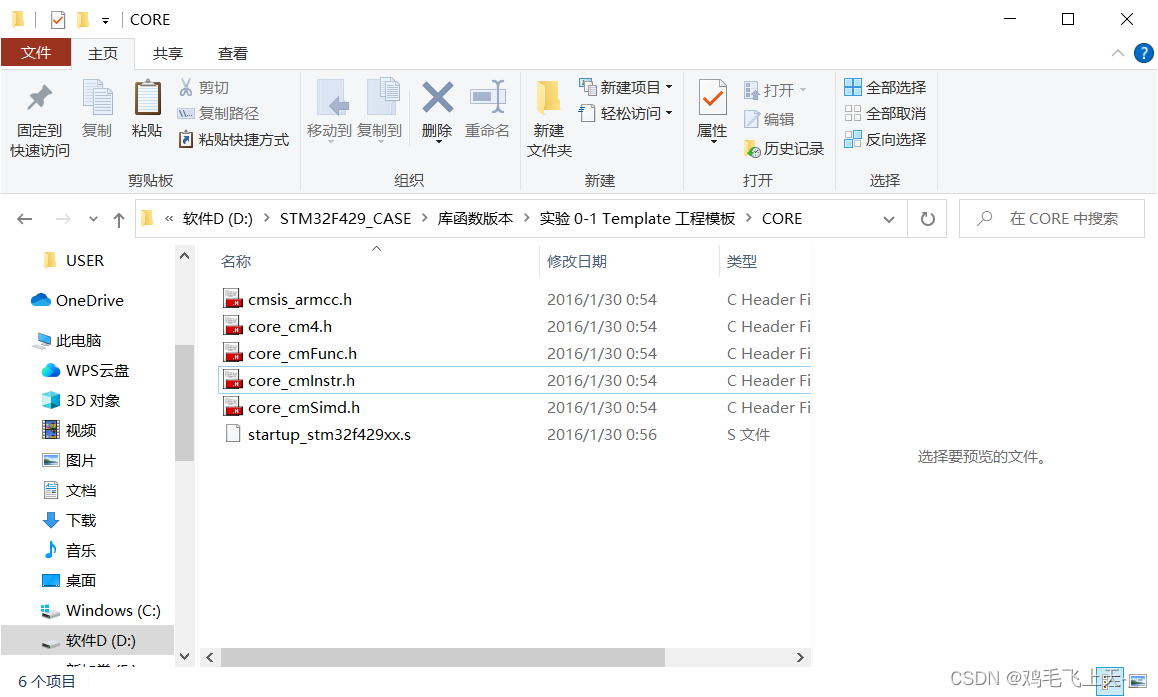
STM32CubeF4包里面相关的启动文件以及一些关键头文件复制到我们的工程目录CORE之下。打开STM32CubeF4包,定位到目录\STM32Cube_FW_F4_V1.11.0\Drivers\CMSIS\Device\ST\STM32F4xx\Source\Templates\arm下面,将文件startup_stm32f429xx.s复制到CORE目录下面 。然后定位到目录\STM32Cube_FW_F4_V1.11.0\Drivers\CMSIS\Include,将里面的五个头文件:cmsis_armcc.h,
core_cm4.h,core_cmFunc.h,core_cmInstr.h,core_cmSimd.h同样复制到CORE目录下面。
现在看看我们的CORE文件夹下面的文件,
-
接下来,我们要复制工程模板需要的一些其他头文件和源文件到我们工程。首先定位到目录:
\STM32Cube_FW_F4_V1.11.0\Drivers\CMSIS\Device\ST\STM32F4xx\Include将里面的 3 个文件stm32f4xx.h,system_stm32f4xx.h和stm32f429xx.h复制到USER目录之下。这三个头文件是STM32F4工程非常关键的头文件。然后进入目录\STM32Cube_FW_F4_V1.11.0\Projects\STM32F429I-Discovery\Templates目录下,我们需要从Src和Inc文件夹下面复制我们需要的文件到USER目录。首先我们打开Inc目录,将目录下面的3个头文件stm32f4xx_it.h,stm32f4xx_hal_conf.h和main.h全部复制到USER目录下面。然后我们打开Src目录,将下面的四个源文件system_stm32f4xx.c,stm32f4xx_it.c,stm32f4xx_hal_msp.c和main.c同样全部复制到USER目录下面。
-
接下来,我们还需要复制
ALIENTEK编写的SYSTEM文件夹内容到工程目录中。
到这里,工程模板所需要的所有文件都已经复制进去。接下来,我们将在MDK中将这些文件添加到工程。 -
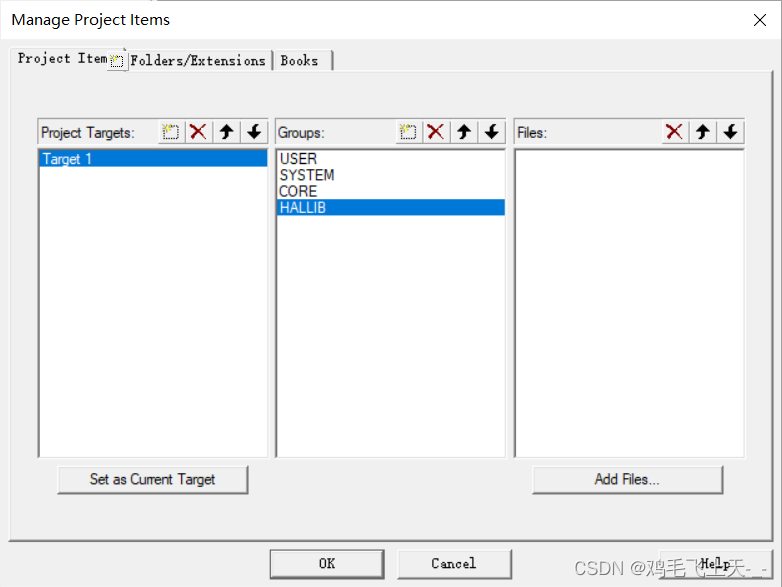
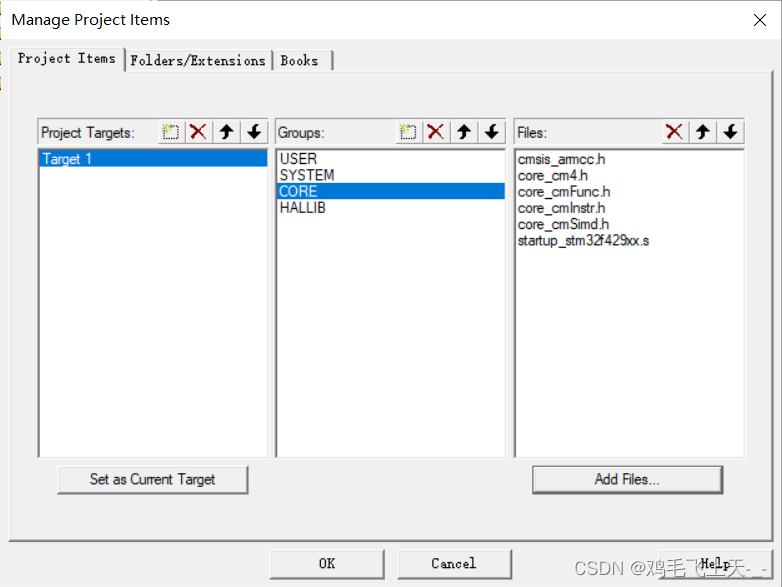
下面我们将前面复制过来的文件加入我们的工程中。右键点击
Target1,选择Manage Project Items,

-
建立四个
Groups:USER,SYSTEM,CORE,和HALLIB。
-
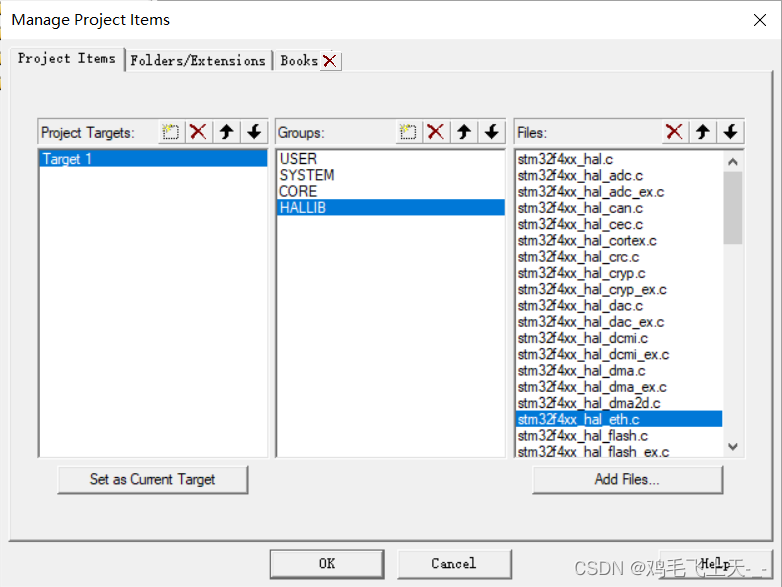
下面我们往
Group里面添加我们需要的文件。第一步我们选择HALLIB,然后点击右边的Add Files,定位到我们刚才建立的目录\HALLIB\Src下面,将里面所有的文件选中(Ctrl+A),然后点击Add,然后Close。可以看到Files列表下面包含我们添加的文件。这里有 几 个 文件比较特殊 , 例 如stm32f4xx_hal_dsc.c,stm32f4xx_hal_iptim.c和stm32f4xx_hal_msp_template.c三个文件不需要引入工程。stm32f4xx_hal_dsi.c是mipi接口相关函数,STM32F429没有这个接口,所以这个文件可以不用引入。stm32f4xx_hal_iptim.c文件是低功耗定时器相关函数,STM32F429也没有这 个功能,也不需要引入。stm32f4xx_hal_msp_template.c文件内容是一些空函数,一般也不需要引入。
-
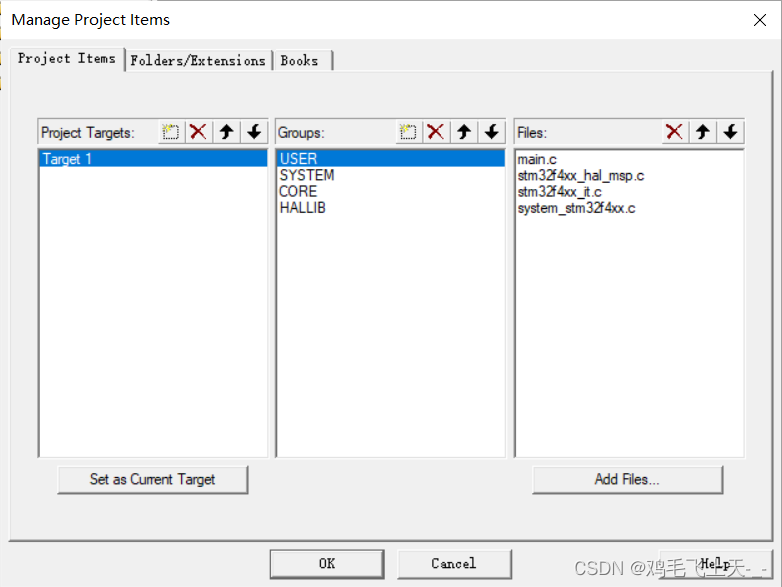
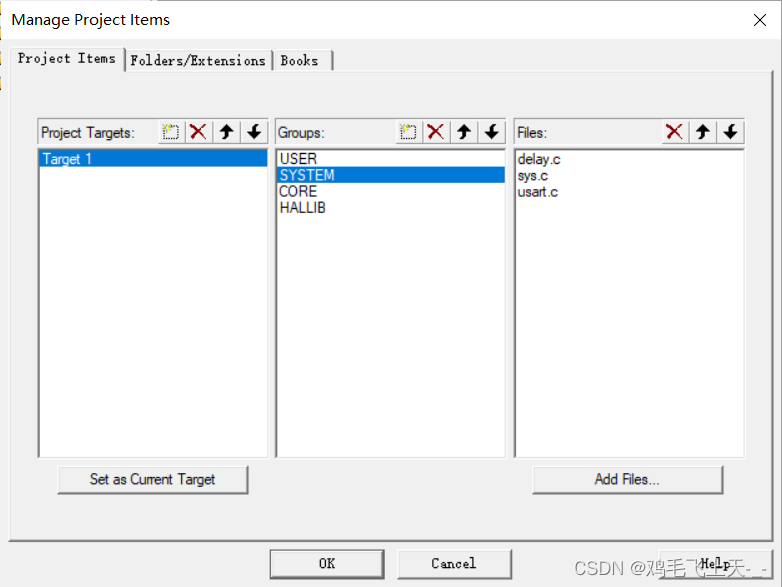
用上面同样的方法,将
Groups定位到CORE,USER和SYSTEM分组之下,添加需要的文件
-
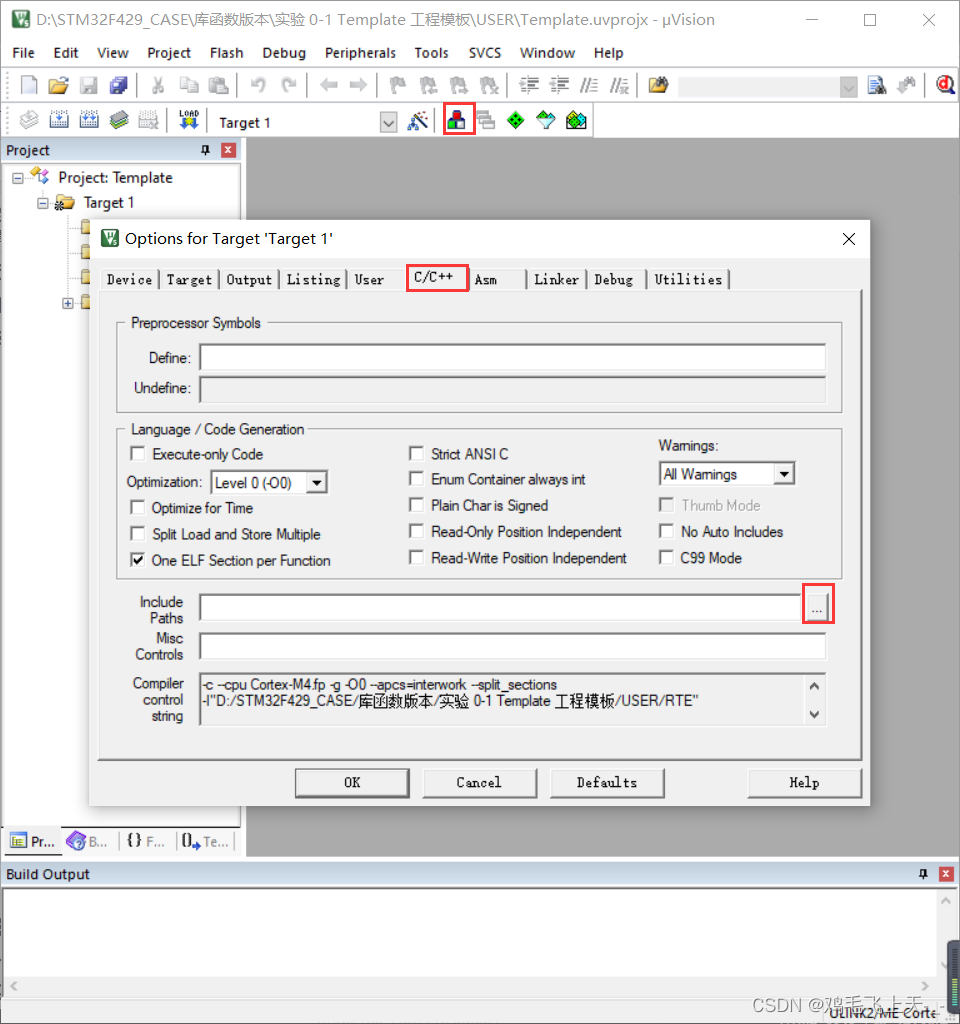
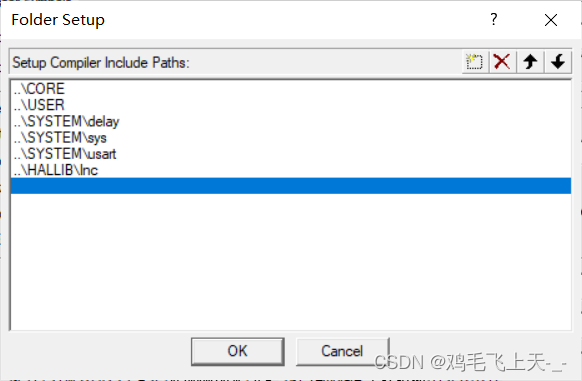
接下来我们要在
MDK里面设置头文件存放路径。也就是告诉MDK到那些目录下面去寻找包含了的头文件。这一步骤非常重要。如果没有设置头文件路径,那么工程会出现报错头文件路径找不到。
-
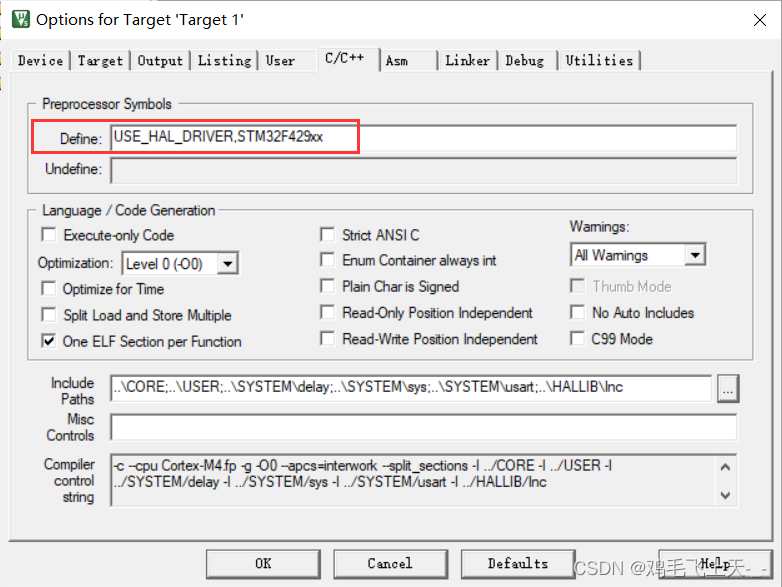
接下来,对于
STM32F429系列的工程,还需要添加全局宏定义标识符,所谓全局宏定义标识符,就是在工程中任何地方都可见。添加方法是点击魔术棒之后,进入C/C++选项卡,然后在Define输入框连输入:USE_HAL_DRIVER,STM32F429xx。
-
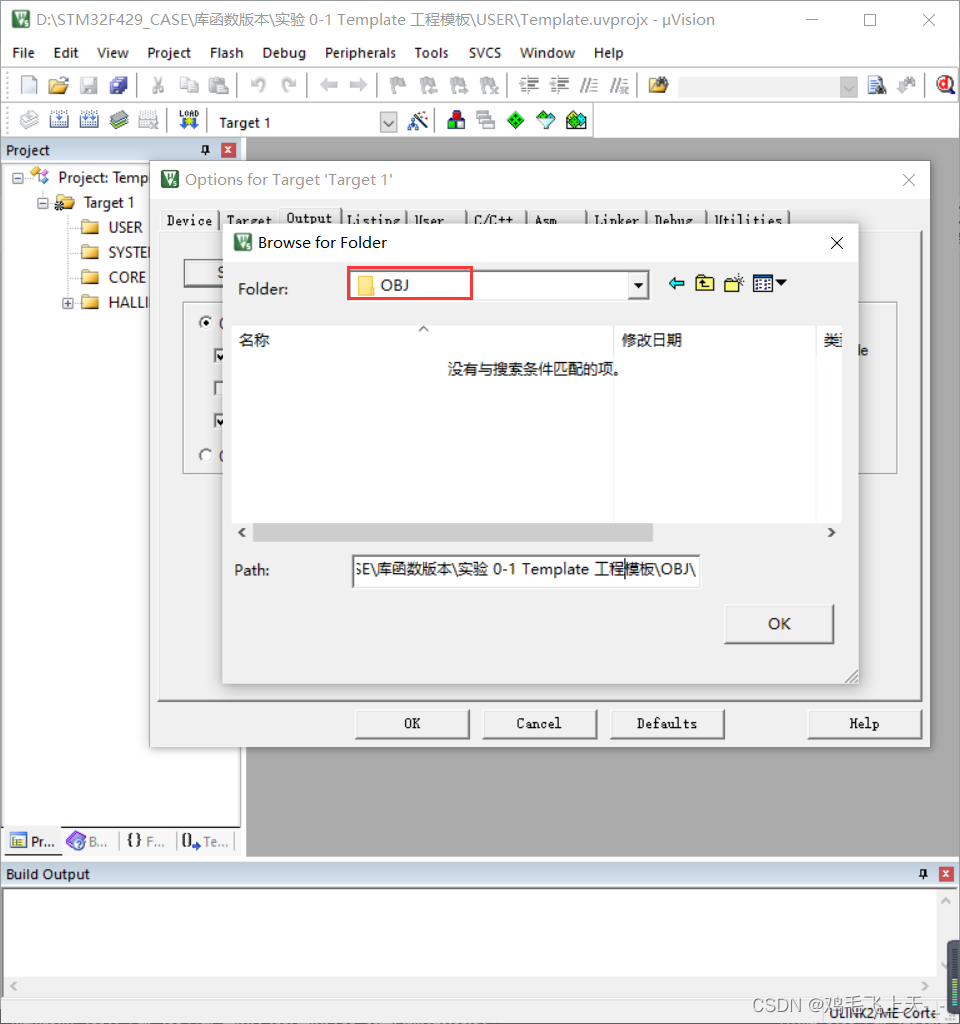
接下来我们要编译工程,在编译之前我们首先要选择编译中间文件编译后存放目录。
MDK默认编译后的中间文件存放目录为USER目录下面的Listings和Objects子目录,这里为了和我们ALIENTEK工程结构保持一致,我们重新选择存放到目录OBJ目录之下。
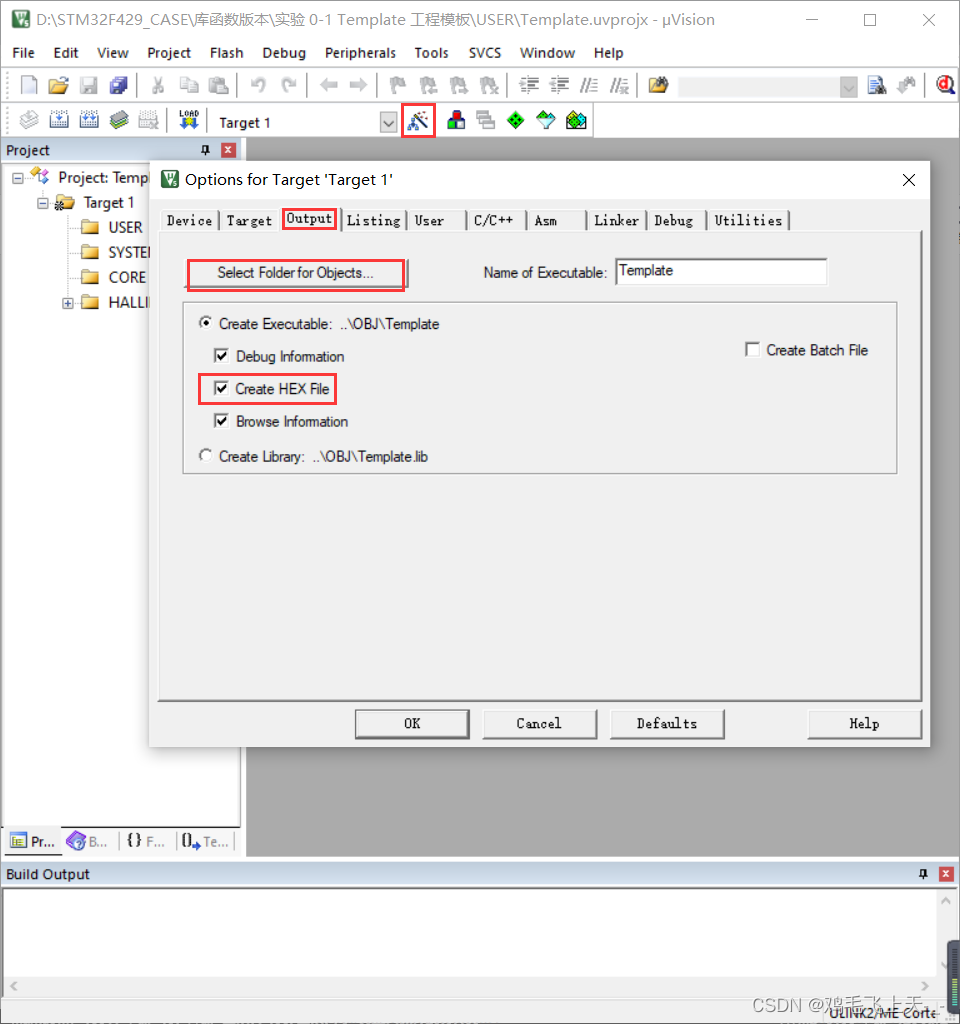
这里我们还要勾上“Create HEX File”选项和Browse Information选项。Create HEX File选项选上是要求编译之后生成HEX文件。 -
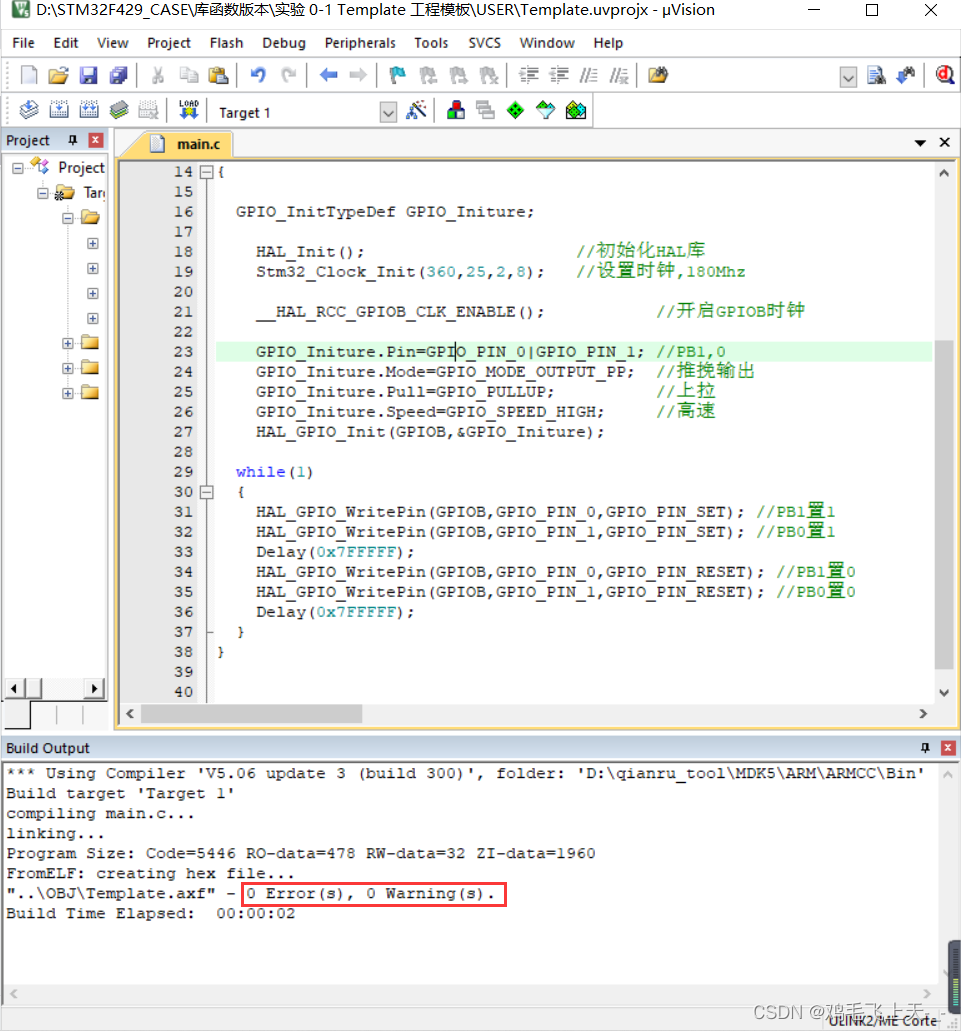
接下来,在编译之前,我们先把
main.c文件里面的内容替换为如下内容:#include "sys.h" #include "delay.h" #include "usart.h" void Delay(__IO uint32_t nCount); void Delay(__IO uint32_t nCount) { while(nCount--){} } int main(void) { GPIO_InitTypeDef GPIO_Initure; HAL_Init(); //初始化HAL库 Stm32_Clock_Init(360,25,2,8); //设置时钟,180Mhz __HAL_RCC_GPIOB_CLK_ENABLE(); //开启GPIOB时钟 GPIO_Initure.Pin=GPIO_PIN_0|GPIO_PIN_1; //PB1,0 GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推挽输出 GPIO_Initure.Pull=GPIO_PULLUP; //上拉 GPIO_Initure.Speed=GPIO_SPEED_HIGH; //高速 HAL_GPIO_Init(GPIOB,&GPIO_Initure); while(1) { HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_SET); //PB1置1 HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_SET); //PB0置1 Delay(0x7FFFFF); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_RESET); //PB1置0 HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET); //PB0置0 Delay(0x7FFFFF); } } -
点击编译按钮编译工程,可以看到工程编译通过没有任何错误和警告。
-
到这里,一个基于
HAL库的工程模板就建立完成,同时在工程的OBJ目录下面生成了对应的hex文件。 -
这里还一个地方需要修改一下,那就是关于系统初始化之后的中断优先级分组组号的设置。默认情况下调用
HAL初始化函数HAL_Init之后,会设置分组为组 4,这里正点原子所有实验使用的是分组 2,所以我们修改HAL_Init函数内部,重新设置分组为组 2 即可。具体方法是:打开HALLIB分组之下的stm32f4xx_hal.c文件,搜索函数HAL_Init,找到函数体,里面默认有这样一行代码:HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4);我们将入口参数
NVIC_PRIORITYGROUP_4修改为NVIC_PRIORITYGROUP_2即可。
![[附源码]计算机毕业设计酒店客房管理系统Springboot程序](https://img-blog.csdnimg.cn/794df01ea26d4141b0449a522e76658b.png)