Ubuntu20.04LTS下安装Intel Realsense D435i驱动与ROS运行D435i节点
1:RealSense的SDK安装
1.1:更新初始化
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade
1.2:注册服务器的公钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp:
1.3:将服务器添加到存储库列表中
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
1.4:安装SDK
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
1.5:安装dev和debug工具(optional)
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
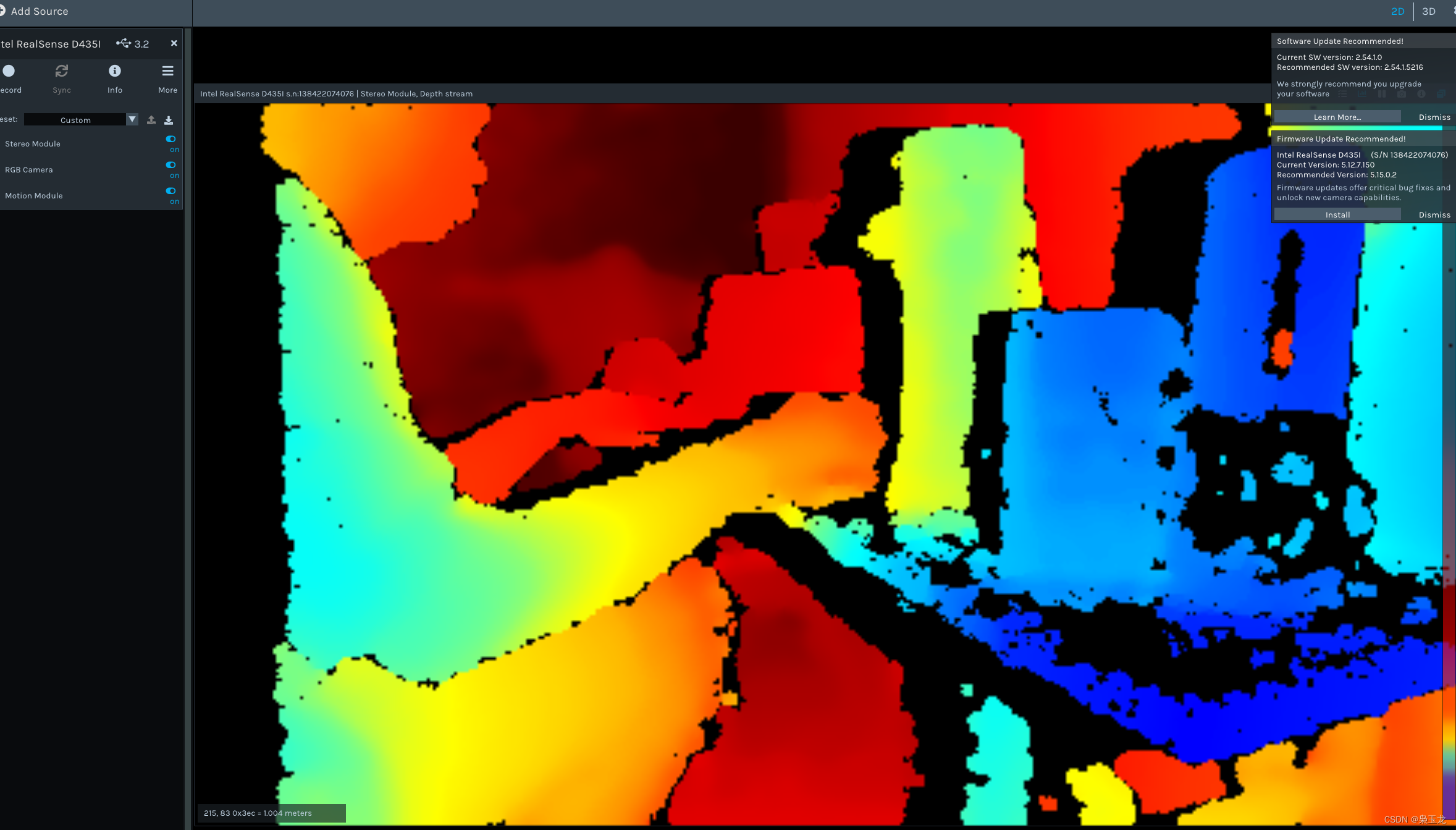
1.6:测试安装结果
realsense-viewer
2:ROS源代码安装
2.1:ubuntu下创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
2.2:git下来realsense包到这个空间
git clone https:
git clone https:
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
2.3:编译安装
cd ..
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
2.4:添加
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
2.5:启动
roslaunch realsense2_camera rs_camera.launch
2.6:查看相机的节点
rostopic list
2.7:启动rviz
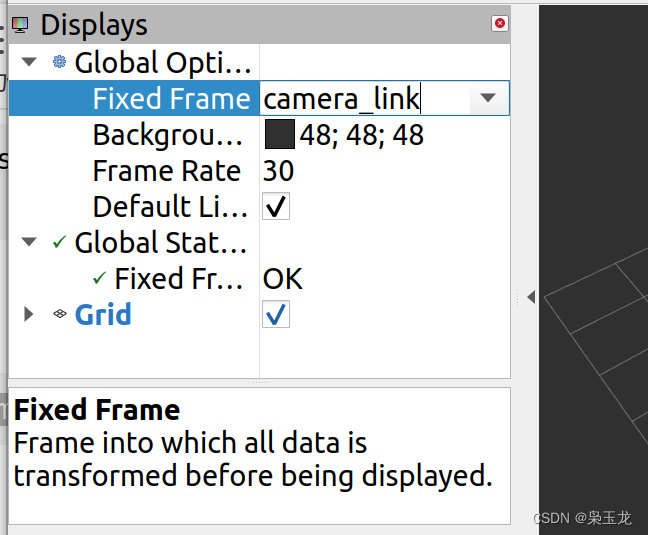
rviz
设置成:camera_link
添加image
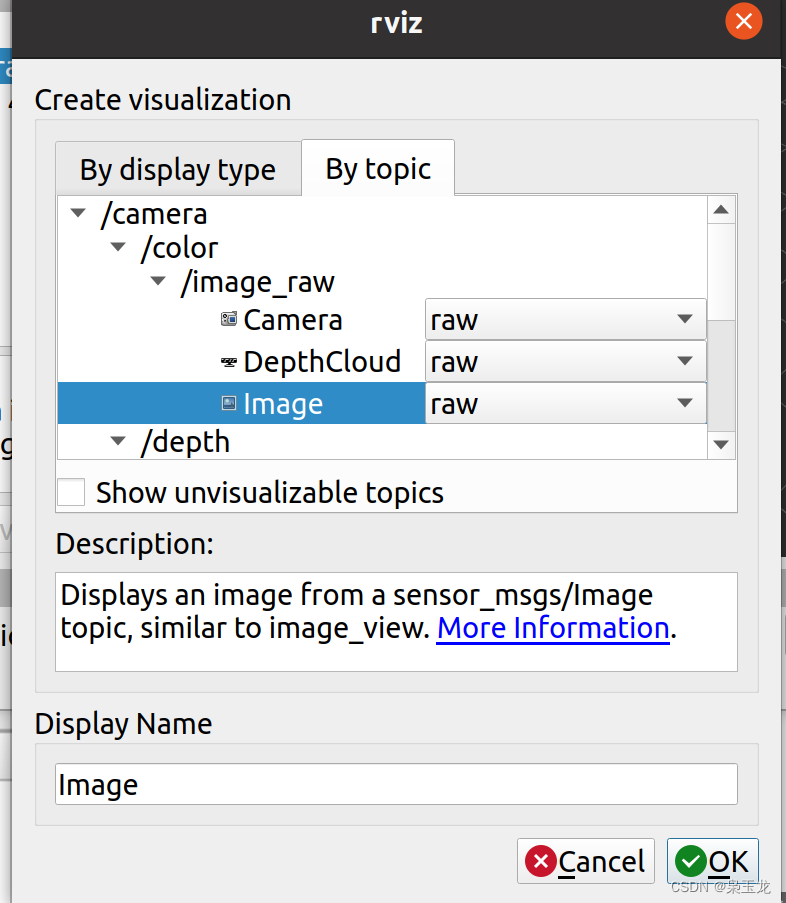
显示的图像

2.8:安装rgbd-launch,形成3D点云图像
rgbd_launch是一组打开RGBD设备,并load 所有nodelets转化 raw depth/RGB/IR 流到深度图(depth image), 视差图(disparity image)和点云(point clouds)的launch文件集。
sudo apt-get install ros-noetic-rgbd-launch
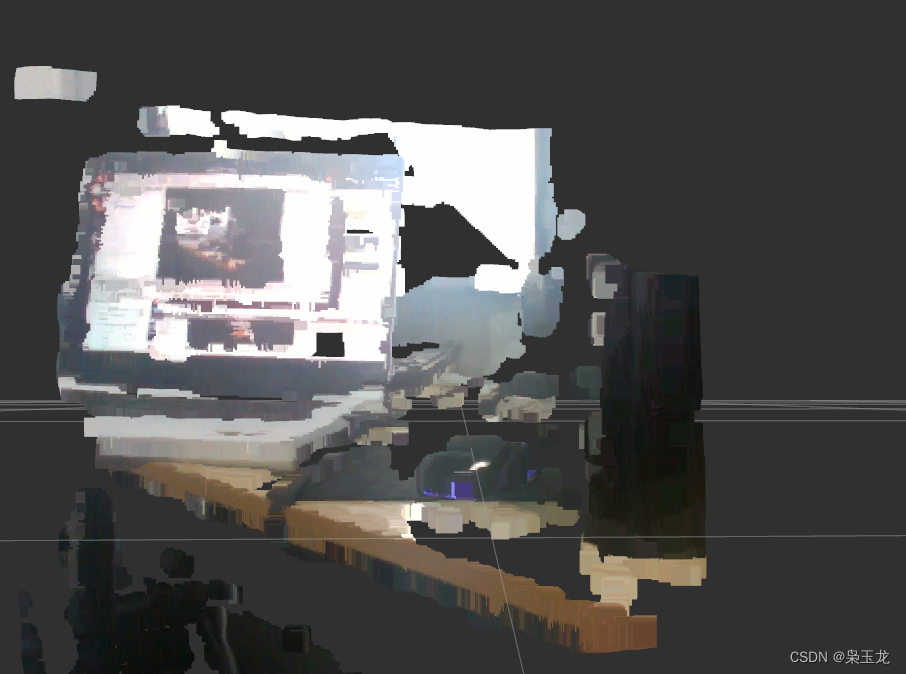
2.9:测试编译结果:
roslaunch realsense2_camera demo_pointcloud.launch