【问题描述】
题目6:数阵问题
每个局面是三行三列的数字方阵,每个位置为0-8的一个数码且互不相同,求从初始局面(自己设定)如何“最快”移动到终止局面(自己设定)。
移动规则:每次只能0与其上下左右四个方向相邻的某个数字交换!可能有解,可能无解。
| 0 | 1 | 2 |
| ? |
| 1 | 2 | 3 |
| 3 | 4 | 5 |
| =》 |
| 4 | 5 | 6 |
| 6 | 7 | 8 |
|
|
| 7 | 8 | 0 |
【需求分析】
一、基本功能
1.用户自己设定初始界面、终止界面,九宫格上方块可移动;
2.根据初始界面和终止界面,打印出移动的路径。
二、附加功能
1.用户移动九宫格的回退功能;
2. 使用了A*搜索、全局择先、宽度优先三种算法,对移动路径进行搜索;
3. 针对A*搜索和全局择先算法,设计了四种估值函数;
4. 判断在指定估值函数、指定算法的情况下,移动的步数及时间,将结果存储至数据库,并在前端回显。
【概要设计】
一、系统信息
开发的硬件环境
CPU:11th Gen Intel(R) Core(TM) i7-11800H @ 2.30GHz 2.30 GHz
RAM:16.0 GB
开发该系统的操作系统
版本:Windows 10 家庭中文版
软件开发环境/开发工具
Intellij IDEA2021.1.1
Visual Studio Code
HBuilder X
Postman、ApiPost7
编程语言
Java
技术点
后端技术:Springboot、SpringMVC、knife4j、Mybatis-plus、MySQL、maven、lombok
前端技术:HTML、CSS、JavaScript、Vue、JQuery、Element-ui、Layui、axios
二、功能模块
根据需求,设计的八数码求解系统的功能有,九宫格的移动、搜索移动路径、状态记录这三大类。详情如图 1所示:
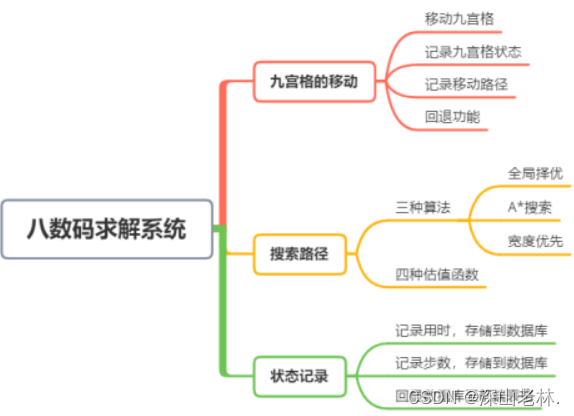
图 1 系统功能图
三、项目架构
(一)MVC三层架构
表 1 MVC架构表
| 层次 | 作用 | 设计原则 |
| 模型层(MODEL) | 封装应用的一系列数据,并定义操作,处理这些数据的逻辑和计算规则 | 通过调用接口对控制器进行反馈 |
| 视图层 (VIEW) | 视图对象的主要目的之一是将应用模型对象中的数据显示出来,并允许用户编辑该数据 | 通过ajax发送异步请求,和控制器进行反馈 |
| 控制器层(CONTROLLER) | 控制器是在视图层和若干个模型层的中间人 | 直接操作模型层和视图层 |
(二)包结构
项目使用的是基本的MVC三层架构,其中common包下存放通用实体类,config下是对tomcat服务器的配置信息,controller包下是控制层,mapper层下是数据库操作的Interface接口,service是业务层,system下是实体类,vo包下定义的类是值对象,用来传递数据和信息。包目录结构如图 2所示。
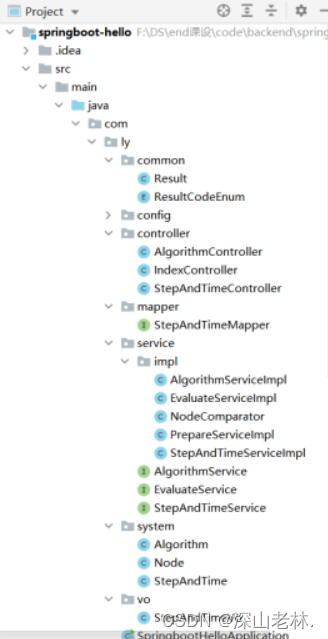
图 2 项目包目录
四、存储结构
在JavaEE开发设计的过程中,和C语言的结构体类似,Java中的存储放在一个实体类中。比如跟三种算法相关的信息,我存放在了Node节点和Algorithm节点中,节点Node的存储结构如图 9所示
表 2 节点Node的存储结构
| 数据项名称 | 数据项系统表示 | 数据类型 | 数据长度 | 备注 |
| 存放顶点数据 | num | int[][] | 3*3 |
|
| 移动步数/深度 | depth | int |
|
|
| 逆序数 | Reverse_order_number | int |
|
|
| 父节点移动方向 | direction | int |
|
|
| 估值函数值 | worth | int |
|
|
Node类的代码如下:
public class Node {
public int[][] num =new int [3][3]; //用于存放节点数据
public int depth; //移动步数/深度
int Reverse_order_number; //逆序数
public int direction;//1 2 3 4 分别为上下左右
public int worth; //启发式函数的值
}节点Algorithm的存储结构如表 3所示:
表 3 Algorithm的存储结构
| 数据项名称 | 数据项系统表示 | 数据类型 | 数据长度 | 备注 |
| num的初始状态 | num_Initial | int[][] | 3*3 |
|
| num的结束状态 | num_Eventual | int[][] | 3*3 |
|
| 开始时间 | starTime | long |
|
|
| 最大搜索长度 | MAX_SEARCH_DEPTH | int |
|
|
类Algorithm的源码如下所示:
public class Algorithm {
public static int[][] num_Initial =new int [3][3];
public static int[][] num_Eventual =new int [3][3];
public static long starTime;
public static int MAX_SEARCH_DEPTH=100;
}函数执行结果的存储类为StepAndTime,存储结构如下:
表 4 StepAndTime存储结构
| 数据项名称 | 数据项系统表示 | 数据类型 | 数据长度 | 备注 |
| 主键 | id | String |
|
|
| 算法名 | algorithm_name | String |
|
|
| 估值函数 | algorithm_value_estimate | String |
|
|
| 时间花费 | time_cost | String |
|
|
| 步数 | step | int |
|
|
StepAndTime类的代码如下:
public class StepAndTime {
private String id;
private String algorithm_name;
private String algorithm_value_estimate;
private String time_cost;
private int step;
}这里的StepAndTime节点存放至了数据库,可实现数据库的增删改查的功能,其中表step_and_time的结构如图 3所示。
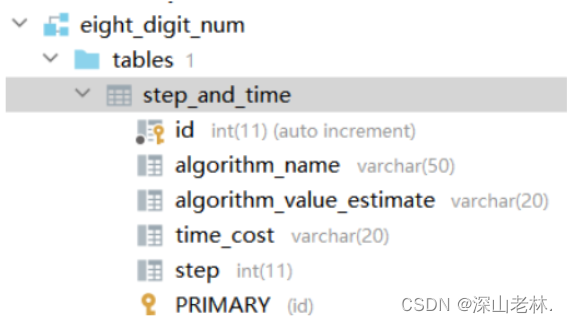
图 3 数据库存储
【详细设计】
一、九宫格的移动
(一)移动九宫格
在前端界面中放置了两个九宫格,每个九宫格里都是1-8的八个数,第一个九宫格代表初始状态,第二个九宫格代表的是目标状态,用户点击空块,即九宫格除8个有数字的块以外的块时,该块会和空块做交换,交换逻辑如图 4所示。

图 4 点击方块的移动效果
(二)记录九宫格状态、移动状态
用一个ti2数组对九宫格状态进行记录,用字符串拼接的方式对九宫格移动的状态进行记录(用于回退),将内容打印在控制台中。
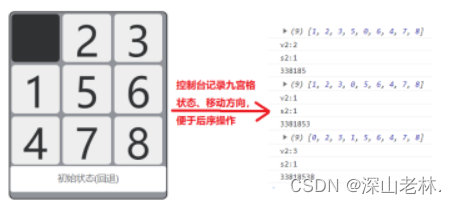
图 5 记录九宫格状态
(三)回退功能
点击下面的回退按钮,会返回前一个九宫格状态。
二、搜索路径
(一)全局择优算法
全局择优搜索属于启发式搜索,即利用已知问题中的启发式信息指导问题求解,而非蛮力穷举的盲目搜索。
启发式信息:即,可用于指导搜索过程,且与具体问题求解有关的控制性信息。
启发函数:用于描述启发式信息的数学模型,称为启发函数,根据问题特点和看待问题的角度不同,同一问题,可以定义多个启发函数。
全局择优算法的执行流程是先把初始节点S0放入OPEN表中,根据当前结点的深度和当前结点和目标结点差异的度量,计算出启发函数f(S0),如果OPEN表为空,那么问题没有解,直接退出程序,如果OPEN表还不为空,那就把OPNE表的第一个节点n放入CLOSED表,考察该节点是否是目标结点,如果是的,那就可以直接得出问题解,从而退出程序,如果还没找到目标节点,则节点n不可以扩展,转到Step2,如果节点n可以扩展,则扩展该节点,用估值函数f(n)计算每个节点的估价值,并给每个子结点配置指向父结点的指针,把这些子节点都放入OPEN表中,然后对OPEN表中的所有节点按照估值函数f(n)的大小进行排序,再转到Step2去,全局择优算法的执行流程如表 5所示。
表 5 全局择优算法执行流程
| 步骤 | 全局择优算法流程 |
| Step1 | 把初始节点SO放入OPEN表,f(S0) |
| Step2 | 如果OPEN表为空,则问题无解,退出 |
| Step3 | 把OPEN表的第一个节点(记为节点n)取出放入CLOSED表 |
| Step4 | 考察节点n是否为目标节点。若是,则求得问题的解,退出 |
| Step5 | 若节点n不可扩展,则转Step2 |
| Step6 | 扩展节点n,用启发函数f(x)计算每个子节点的估价值,并为每个子节点配置指向父节点的指针,把这些子节点都送入OPEN表中,然后对OPEN表中的全部节点按估价值从小到大的顺序进行排序,然后转Step2 |
(二)A*搜索算法
A*搜索算法相对于全局择优算法改动非常小,只增加了个别函数,全局择优、A算法和A*算法的定义、区别介绍如表 6所示:
表 6 A算法、A*算法定义
| 定义 | 全局择优算法流程 |
| 定义1 | 在GRAPHSEARCH过程中,如果重排OPEN表是依据f(x)=g(x)+h(x)进行的,则称该过程为A算法 |
| 定义2 | 在A算法中,如果对所有的x,h(x)<=h*(x)成立,则称h(x)为h*(x)的下界,它表示某种偏于保守的估计 |
| 定义3 | 采用h(x)的下界h*(x)为启发函数的A算法称为A*算法 |
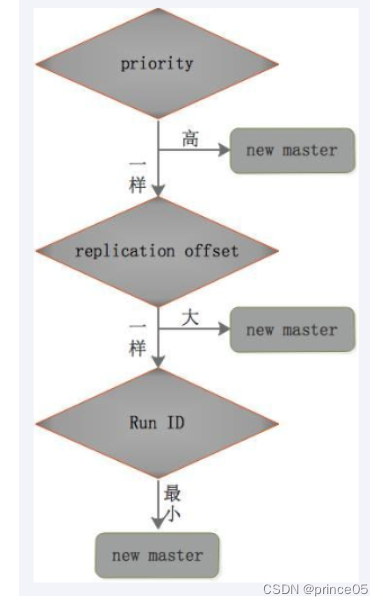
A*算法是在A算法的基础上,每生成一个新节点,即查找closed表,如果closed表中有相同排列的结点,那么则比较他们的权重(f(n)),如果新节点的权重更小,则替代原结点,即,刷新原结点的深度,这样就很有可能找到更短、更快的到达目标结点的路径。A*算法执行的流程图如图 6所示
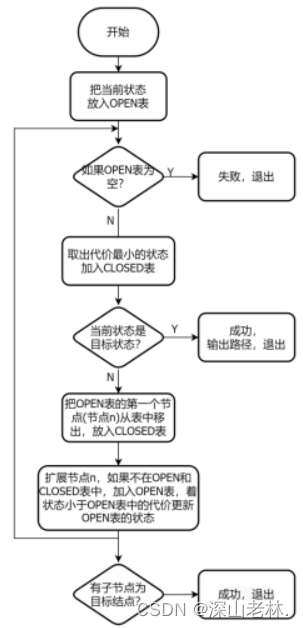
图 6 A*算法执行流程图
(三)宽度优先算法
宽度优先算法是一种盲目搜索算法,即,蛮力法;需要一个Open表,把起始节点放入Open表中,如果Open表为空,则无解并退出,否则,继续把第一个节点n从Open表中移除,并放入CLOSED扩展节点表中。这里要考察节点n是不是目标节点,如果是的话,就代表求出答案了,则可以退出,如果节点n往下不可以接着扩展了,那么转到第二步,继续从OPEN表中选节点,放入CLOSED表考察。如果节点n可扩展,则把所有n的子节点放入OPEN表的尾部,配置父节点指针,继续转Step2开始下一轮判断。算法流程如表 7所示。
表 7 宽度优先算法流程表
| 步骤 | 宽度优先算法流程 |
| Step1 | 把起始节点放到OPEN表中 |
| Step2 | 如果OPEN是个空表,则没有解失败退出;否则继续 |
| Step3 | 把第一个节点 (节点n) 从OPEN表移出,并把它放入CLOSED扩展节点表中 |
| Step4 | 考察节点n是否为目标节点。如果是,则求得了问题的解,退出 |
| Step5 | 如果节点n不可扩展,则转Step2 |
| Step6 | 把n的所有子节点放到OPEN表的尾部,并为其配置指向父节点的指针然后转第Step2步 |
算法流程图如图 7所示
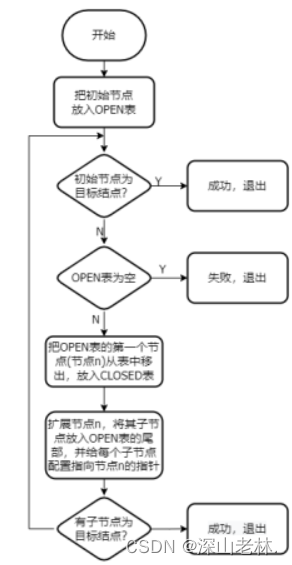
图 7 宽度优先算法流程图
(四)四种估值函数
对于全局择优和A*搜索这两种算法,为了求取最优解,可以设置不同的估值函数,测试看不同的效果。这里选择了四种估值函数,估值函数的解释如图 8所示。
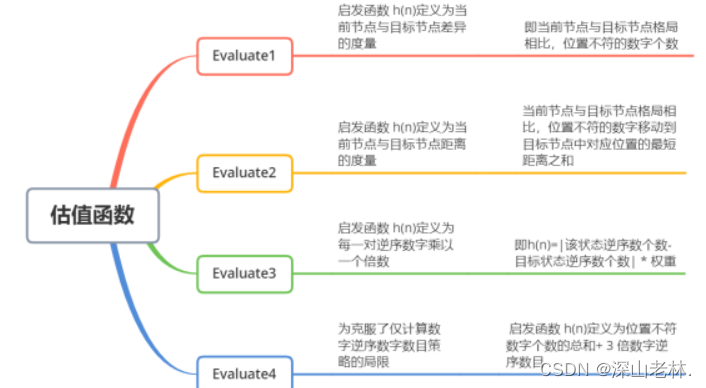
图 8 四种估值函数
这里的Evaluate1和Evaluate2的启发函数定义为当前结点与目标结点差异的度量,这里的“差异”,可以是当前节点与目标节点相比,位置不符的数字个数,也可以是当前节点和目标节点格局相比,位置不符的数字移动到目标节点中对应位置的最短距离之和。
Evaluate3定义为每一对逆序数字乘以一个倍数,即该状态下 逆序数个数与目标状态逆序数个数的绝对值乘以权重。
Evaluate4是为了克服仅在计算数字逆序数字量策略的局限,启发函数定义为位置不符数字个数的总和+3倍逆序数字序列。
三、状态记录
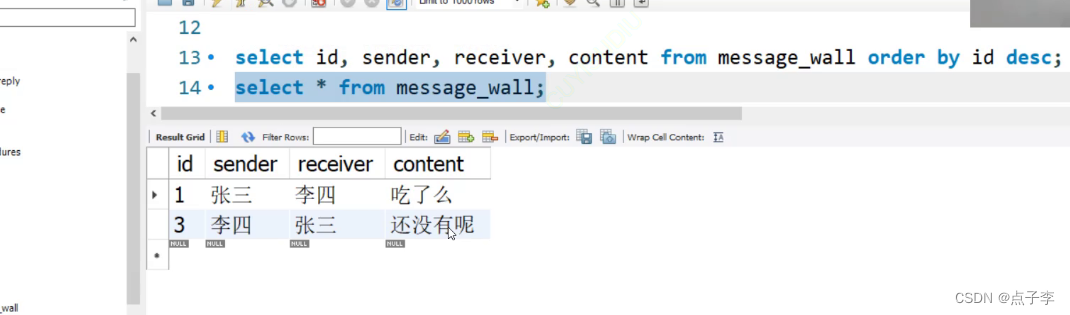
前端使用了el-table表格,对八数码路径查找执行时的用时、步数等进行了数据的持久化存储,并利用axios调用后端接口,实现了数据的回显。在前端显示的表格中,部分数据如图 9所示。

图 9 数据记录表的部分数据
【编码实现】
由于主要功能的实现是通过估值函数类&&算法类实现的,所以在这里,仅对四种估值函数和三种算法做介绍。
一、估值函数
(一)估值函数1
启发函数 h(n)定义为当前节点与目标节点差异的度量:即当前节点与目标节点格局相比,位置不符的数字个数。其中,估值函数Evaluate1的代码如下:
public int Evaluate1(int a[][],int[][] num_Finish) {
int n = 0;
for (int i = 0; i < 3; ++i) {
for (int j = 0; j < 3; ++j) {
if (a[i][j] != num_Finish[i][j])
++n;//找两个状态有多少个格子位置错了
}
}
return n;
}(二)估值函数2
启发函数 h(n)定义为当前节点与目标节点距离的度量:当前节点与目标节点格局相比,位置不符的数字移动到目标节点中对应位置的最短距离之和。其中估值函数Evaluate2如下:
public int Evaluate2(int a[][],int[][] num_Finish) {
int h = 0;// 代价
//找到这个数在初始状态和目标状态的位置在哪
for (int i = 0; i < 9; ++i) {
int m, n;
for (m = 0; m < 9; ++m)
//二维数组遍历找0-8中的数字i,找到就往下
if (a[m / 3][m % 3] == i) break;
for (n = 0; n < 9; ++n)
if (num_Finish[n / 3][n % 3] == i)//找到就往下
break;
//行序差+列序差
h += Math.abs((m / 3) - (n / 3)) + Math.abs((m % 3) - (n % 3));
}
return h;
}
(三)估值函数3
启发函数 h(n)定义为每一对逆序数字乘以一个倍数,即h(n)=|该状态逆序数个数-目标状态逆序数个数| * 权重
public int Evaluate3(int a[][],int[][] num_Finish) {
int weight=Math.abs(ReverseNumber(a)-ReverseNumber(num_Finish));
return weight*Math.abs(ReverseNumber(a)-ReverseNumber(num_Finish));
}
(四)估值函数4
为克服了仅计算数字逆序数字数目策略的局限 启发函数 h(n)定义为位置不符数字个数的总和+ 3 倍数字逆序数目。
public int Evaluate4(int a[][],int[][] num_Finish) {
return Evaluate1(a,num_Finish) + 3 * Math.abs(ReverseNumber(a) - ReverseNumber(num_Finish));
}
二、搜索算法
(一)全局择先算法
全局择优算法的执行流程是先把初始节点S0放入OPEN表中,根据当前结点的深度和当前结点和目标结点差异的度量,计算出启发函数f(S0),如果OPEN表为空,那么问题没有解,直接退出程序,如果OPEN表还不为空,那就把OPNE表的第一个节点n放入CLOSED表,考察该节点是否是目标结点,如果是的,那就可以直接得出问题解,从而退出程序,如果还没找到目标节点,则节点n不可以扩展,转到Step2,如果节点n可以扩展,则扩展该节点,用估值函数f(n)计算每个节点的估价值,并给每个子结点配置指向父结点的指针,把这些子节点都放入OPEN表中,然后对OPEN表中的所有节点按照估值函数f(n)的大小进行排序,再转到Step2去,全局择优算法的执行流程如表 5所示。其中,全局择先函数如下:
public int[][][] GlobalSearch2(long info[],int nEvaluate,int[][] num_Begin,int[][] num_Finish) {
starTime = System.nanoTime();
Vector<Node> OPEN=new Vector<Node>();
Vector<Node> CLOSED=new Vector<Node>();
// 添加根节点
OPEN.add(new Node(num_Begin, 0, evaluateService.ReverseNumber(num_Begin), 0, null, evaluateService.Evaluate(num_Begin, 0, nEvaluate,num_Finish)));
while(!OPEN.isEmpty()) {
// 计算可达性,限制搜索深度
if (!isAvailable(OPEN.get(0).num,num_Finish) || OPEN.get(0).depth > MAX_SEARCH_DEPTH) {
return null;
}
CLOSED.add(OPEN.get(0));
OPEN.remove(0);
if(isEqual(CLOSED.lastElement().num,num_Finish)) {
return Route2(CLOSED.lastElement(),info);
}
else {
Node father=CLOSED.lastElement();
int i = 0, j = 0;
// 找到空格
for (int k = 0; k < 9; ++k) {
if (father.num[k / 3][k % 3] == 0) {
i = k / 3;
j = k % 3;
break;
}
}
int dir=father.direction,dep=father.depth;
int a[][]=new int[3][3];
//1 上
if (i != 0&& dir!=2) {
for (int m = 0; m < 3; ++m) {
for (int n = 0; n < 3; ++n) {
a[m][n]=father.num[m][n];
}
}
a[i][j]=a[i-1][j];
a[i-1][j]=0;
OPEN.add(new Node(a, dep + 1, evaluateService.ReverseNumber(a), 1, father,evaluateService.Evaluate(a, dep + 1, nEvaluate,num_Finish)));
}
//参照“1 上”,执行下、左、右三个方向的扩展
}
return null;
}
(二)A*搜索算法
A*搜索算法相对于全局择优算法改动非常小,只增加了个别函数,因此在此处省略。
(三)宽度优先算法
宽度优先算法是一种盲目搜索算法,即,蛮力法;需要一个Open表,把起始节点放入Open表中,如果Open表为空,则无解并退出,否则,继续把第一个节点n从Open表中移除,并放入CLOSED扩展节点表中。这里要考察节点n是不是目标节点,如果是的话,就代表求出答案了,则可以退出,如果节点n往下不可以接着扩展了,那么转到第二步,继续从OPEN表中选节点,放入CLOSED表考察。如果节点n可扩展,则把所有n的子节点放入OPEN表的尾部,配置父节点指针,继续转Step2开始下一轮判断。算法流程如表 7所示。WideSearch2函数如下所示:
public int[][][] WideSearch2(long info[],int[][] num_Begin,int[][] num_Finish) {
int[][][] result = {};
starTime = System.nanoTime();
Vector<Node> OPEN = new Vector<Node>();//声明不定长数组
Vector<Node> CLOSED = new Vector<Node>();
// 把初始节点送入OPEN表
OPEN.add(new Node(num_Begin, 0, evaluateService.ReverseNumber(num_Begin), 0, null, 0));
//初始节点是否是目标节点?
if(isEqual(OPEN.get(0).num,num_Finish)){
String s = "-----第1步-----\n";
for (int k = 0; k < 3; ++k) {
for (int j = 0; j < 3; ++j) {
s += CLOSED.lastElement().num[k][j] + " ";
//最后一个元素的节点数据
result[0][k][j] = CLOSED.lastElement().num[k][j];
}
s += "\n";
}
s += "-----结束-----\\n";
info[0] = 0; // 移动步数
info[1] = System.nanoTime() - starTime;
return result;
}
while (!OPEN.isEmpty()) {
// 计算可达性,限制搜索深度
if (!isAvailable(OPEN.get(0).num,num_Finish) || OPEN.get(0).depth > MAX_SEARCH_DEPTH) {
return null;
}
CLOSED.add(OPEN.get(0));
OPEN.remove(0);
int i = 0, j = 0;
// 找到空格
for (int k = 0; k < 9; ++k) {
if (CLOSED.lastElement().num[k / 3][k % 3] == 0) {
i = k / 3;
j = k % 3;
break;
}
}
int dir = CLOSED.lastElement().direction, dep = CLOSED.lastElement().depth;
int a[][] = new int[3][3];
// 1 上
if (i != 0 && dir != 2) {
for (int m = 0; m < 3; ++m) {
for (int n = 0; n < 3; ++n) {
a[m][n] = CLOSED.lastElement().num[m][n];
}
}
a[i][j] = a[i - 1][j];
a[i - 1][j] = 0;
Node temp = new Node(a, dep + 1, evaluateService.ReverseNumber(a), 1, CLOSED.lastElement(), 0);
// 子节点是否是目标节点?
if (isEqual(temp.num,num_Finish)) {
return Route2(temp, info);
}
OPEN.add(temp);
}
//参照“1 上”,执行下、左、右三个方向的扩展
}
return null;
}【实验结果与分析】
一、执行逻辑
| 介绍 | 运行截图 |
|
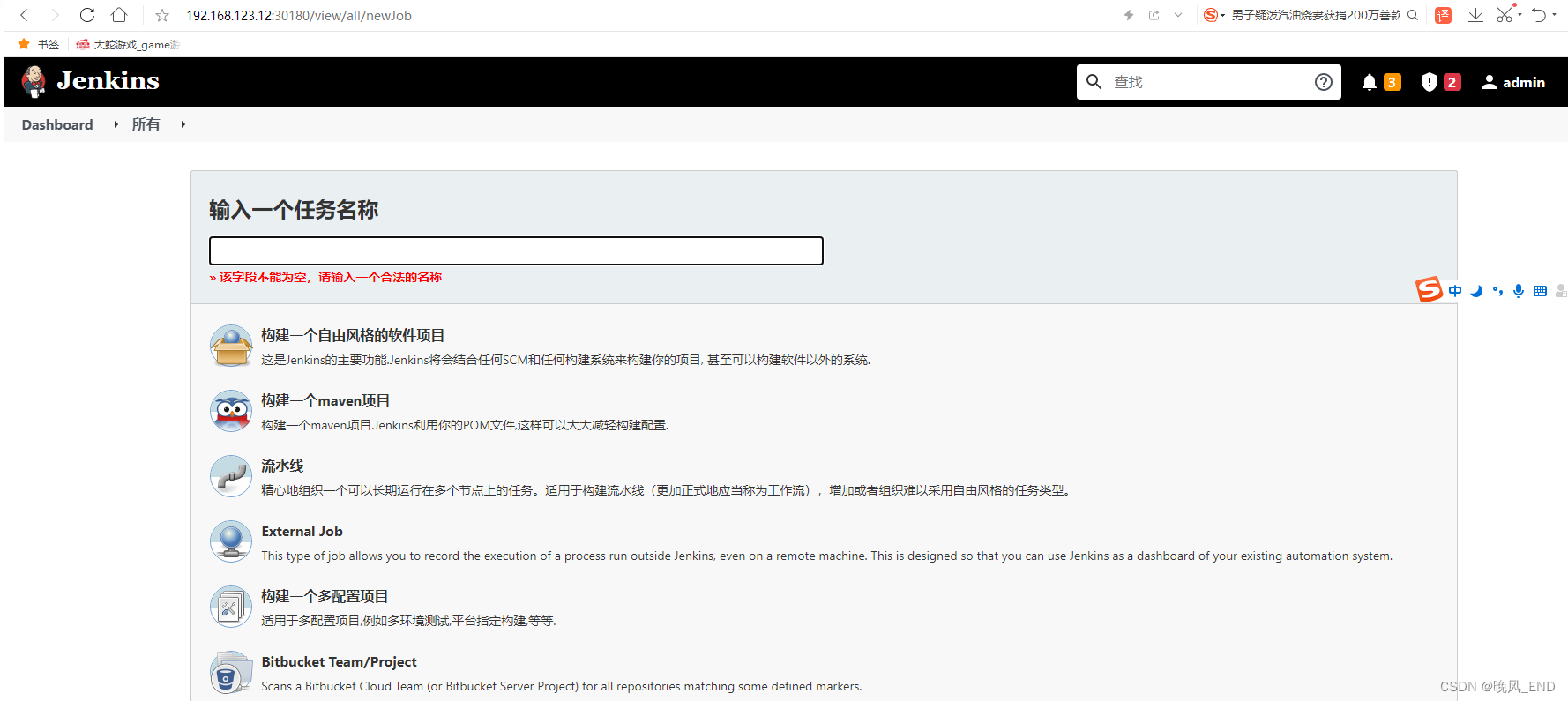
初始化界面由九宫格的初始状态和目标状态、估值函数选择区、算法选择区、路径打印区、结果记录表组成。 | 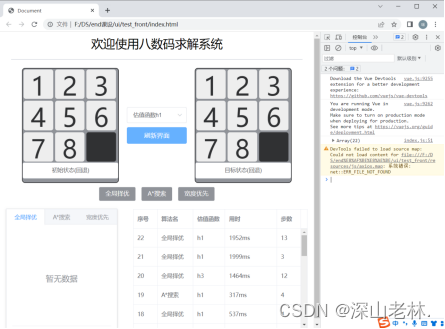
|
|
打乱九宫格后,点击“全局择先”按钮,跳出confirm框,询问是否确定进行路径查找。 | 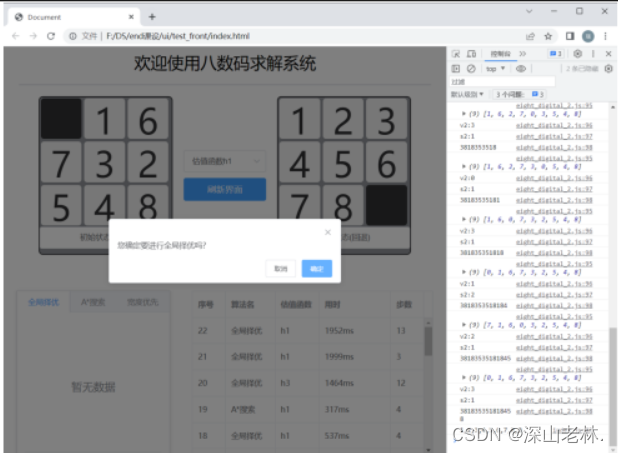
|
|
选择确定后,打印出初始状态到目标状态需要走的步数,显示在标签页内嵌的表格中。 | 
|
|
刷新界面后数据会从数据库回显到表格中,三种算法、四种估值函数均可用 | 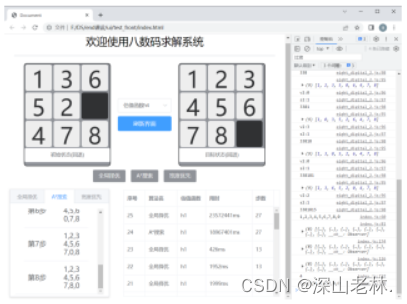
|
二、结果测试
| 信息 | 测试截图 |
| --测试用例1
全局择先 h1 10步 132ms |
|
| --测试用例2
全局择先 h2 10步 166ms |
|
| --测试用例3
A*搜索 h3 10步 319ms |
|
| --测试用例4
宽度优先 10步 655ms |
|




三、结果分析
从上面的对比结果来看可以得到以下的结果分析:
- 选取不同的估值函数,有时还是会得到相同的路径结果;
- A*搜素和全局择先的运行速度比较接近;
- 在初始状态和目标状态相同的情况下,宽度优先的效率低于两种启发式搜索算法,即全局择先和A*算法。
【总结】
现在是凌晨3点20,课设报告终于收尾了,回想这几天的课设制作,也确实是感想颇深。
我是上周四开始写课设的,第一天,当然是储备基础知识,像典型的A*算法,还有全局择先,宽度优先这些,都认真学了一遍。当然还构思了一下课设的思路,因为不限语言,不限技术,脑子里一大堆天马行空的想实现的东西,一开始设计是想对比三种算法的优劣+用深度学习的方法训练一下它去玩这个华容道,看看到底是跑出个什么东西,或者就是想做一个联网的平台,可以让用户自行在网站pk拼图速度,或是打乱让用户还原,比较看和三种算法相比,谁的还原步数少。还想了一个点子就是用户自行上传图片––>裁剪成九宫格的样子––>玩自定义拼图,但都碍于时间有限,就没做了。
当然,由于我目前为止主要学过的也是全栈开发,所以,在这次的课设中,最终呈现的效果,就是一个前后端交互的网页端系统了。
周五,写课设的第二天,想着把后端架子先搭好,结果一下是pom出问题,找半天发现是maven仓库路径写错了,一下又是springboot报错,找半天,然后对着重新敲一遍就又可以运行了,气得我肝疼。好不容易加载出Spring标标了,结果又因为tomcat配的是2.9.5以上版本,配高了它有些东西不认识,又得重新写配置,总而言之就是突然发现,从头搭一个Springboot项目,对经验不丰富的人确实挺困难的呐。
然后下午的时候,开始写逻辑,数据库如果做了实时回显的话,倒也不会显得我那张记录存储表那么没用,还是遇到了很玄学的问题,局部刷新不了+数据回显它只读第一次的,后面无法修改数据+reload整个界面又把我的路径给刷没了,所以最后这个问题就没解决了,后期有时间的话还是做成分页,elementui里倒是有个el-pagenation,今天试了绑定不了数据就没做了,下次有时间再试试。
总之,后端遇到的困难主要是搭框架,还有就是写算法逻辑的问题,估值函数还挺好写的,三个算法对着流程图敲就完了,但一开始设计的时候,图方便,设计的字符串输出,结果就是,前端写完之后,改的我肝疼。
分别测试了三种接口写法,一种是String直接打印结果的,非常丑,而且,不好裁。第二种是返回的三维数组,相当于是吧每种状态都存在了数组中,而每种状态本身就是个二维数组,但因为用了是数组,数组就肯定定长,定长没排满,结果就是一堆0,太心累了,找了一堆办法没裁好,最后想着,要不要就还是用Node存储Service层返回的结果,结果因为设计的问题,它递归了,嵌套了十几二十层,才能找到最里面的节点,前端拿到的json文件,一看,我是真束手无策。最后求助大佬,大佬用三维数组的那个接口,给我裁好了,但我还是追求界面美观,于是又花了一个多小时,把路径结果从直线存成了3x3的了。
然后第三天,周六,开始写前端。前端倒是没啥难点,九宫格是改的一个4x4华容道,把人家网页扒下来,把4x4的逻辑看明白之后改成3x3的了,改这个是真挺累的,4x4的逻辑都是n%4,n÷4,那3x3就是把4改成3?no,4x4的九宫格,可移动也是4个方向,直接改的话肯定是出问题的,逻辑就是一定要能大致看得懂。我主要是卡在了回退函数那里,他那写的是n*3-v啥的,心想,3?这还不对,结果就是,这个用来记录的是移动方向和步数,3x3方格中一共有8种移动方式,所以就是0-8,并且移动两格和移动一格,对plc的修改存在一个二倍关系的,所以swith到break的排序还有要求。不过还得是我,总算还是写出来了。
总之最后呈现的课设效果还算不错,美中不足就是,数据库到最后还是没做到实时回显,数据库在设计的时候缺乏对初始状态和终止状态的记录,and没写自定义拼图这个功能了,还有canvas实现自动还原或打乱九宫格这个功能其实也是有必要的,但也没写了。还有设计实体类的时候,忘屏蔽变量了,全public是非常不安全的做法。
但感觉自己写的还是可以的,这应该也是我再次挑战自我,3天一个Springboot项目,离全栈工程师又近了一步。并且,通过这次的课设,也学习到了贪心、启发式搜索等算法,相信这些都会给我未来的学习带来收获。
最后,课设做完了,感谢老师这学期的辛苦教导!