文章目录
- 前言
- 一、层和块
- 1.1 自定义块
- 1.2 顺序块
- 1.3 在前向传播函数中执行代码
- 1.4 效率问题
- 1.5 小结
- 二、参数管理
- 2.1 参数访问
- 2.1.1 目标参数
- 2.1.2 访问所有参数
- 2.1.3 从嵌套块中收集参数
- 2.2 参数初始化
- 2.2.1 内置初始化
- 2.2.2 自定义初始化
- 2.2.3 参数绑定
- 三、延后初始化
- 四、自定义层
- 4.1 不带参数的层
- 4.2 带参数的层
- 五、读写文件
- 5.1 加载和保存张量
- 5.2 保存和加载模型参数
- 六、GPU
- 6.1 计算设备
- 6.2 张量与GPU
- 6.2.1 存储在GPU上
- 6.2.2 复制
- 6.3 神经网络与GPU
前言
之前我们已经介绍了一些基本的机器学习概念, 并慢慢介绍了功能齐全的深度学习模型。 在上一章中,我们从零开始实现了多层感知机的每个组件, 然后展示了如何利用高级API轻松地实现相同的模型。 为了易于学习,我们调用了深度学习库,但是跳过了它们工作的细节。 在本章中,我们将深入探索深度学习计算的关键组件, 即模型构建、参数访问与初始化、设计自定义层和块、将模型读写到磁盘, 以及利用GPU实现显著的加速。 这些知识将使读者从深度学习“基础用户”变为“高级用户”。 虽然本章不介绍任何新的模型或数据集, 但后面的高级模型章节在很大程度上依赖于本章的知识。
一、层和块
事实证明,研究讨论“比单个层大”但“比整个模型小”的组件更有价值。
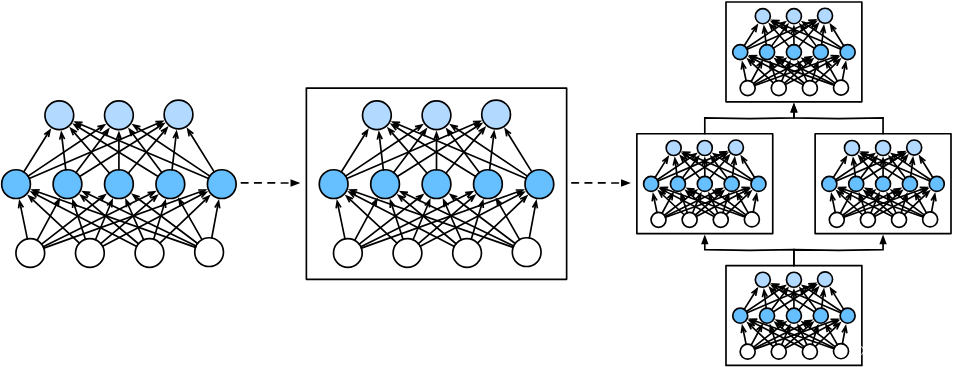
为了试下这些复杂的网络,我们引入了神经网络块的概念。块(block)可以描述单个层、由多个层组成的组件或整个模型本身。 使用块进行抽象的一个好处是可以将一些块组合成更大的组件, 这一过程通常是递归的,如图所示。 通过定义代码来按需生成任意复杂度的块, 我们可以通过简洁的代码实现复杂的神经网络。
从编程的角度来看,块由类表示。它的任何子类都必须定义一个将其输入转换为输出的前向传播函数, 并且必须存储任何必需的参数。
1.1 自定义块
要想直观地了解块是如何工作的,最简单的方法就是自己实现一个。 在实现我们自定义块之前,我们简要总结一下每个块必须提供的基本功能。
-
将输入数据作为其前向传播函数的参数。
-
通过前向传播函数来生成输出。请注意,输出的形状可能与输入的形状不同。
-
计算其输出关于输入的梯度,可通过其反向传播函数进行访问。通常这是自动发生的。
-
存储和访问前向传播计算所需的参数。
-
根据需要初始化模型参数。
下面我们自定义一个块:
import torch
from torch import nn
from torch.nn import functional as F
class MLP(nn.Module):
# 用模型参数声明层。这里,我们声明两个全连接的层
def __init__(self):
# 调用MLP的父类Module的构造函数来执行必要的初始化。
# 这样,在类实例化时也可以指定其他函数参数,例如模型参数params(稍后将介绍)
super().__init__()
self.hidden = nn.Linear(20, 256) # 隐藏层
self.out = nn.Linear(256, 10) # 输出层
# 定义模型的前向传播,即如何根据输入X返回所需的模型输出
def forward(self, X):
# 注意,这里我们使用ReLU的函数版本,其在nn.functional模块中定义。
return self.out(F.relu(self.hidden(X)))
#调用:
net = MLP()
net(X)
块的一个主要优点就是它的多功能性。如:我们可以子类化块以创建层、整个模块或具有中等复杂度的各种组件。
1.2 顺序块
Sequential类的使用:
net = nn.Sequential(nn.Linear(20, 256), nn.ReLU(), nn.Linear(256, 10))
X = torch.rand(2, 20)
net(X)
现在我们来自习琢磨一下pytorch中的Sequential类是如何工作的,回想下Sequential类的功能,我们需要这两个功能:
- 一种将块逐个追加到列表中的函数;
- 种前向传播函数,用于将输入按追加块的顺序传递给块组成的“链条”。
自定义实现类似Sequential的功能:
class MySequential(nn.Module):
def __init__(self, *args):
super().__init__()
for idx, module in enumerate(args):
# 这里,module是Module子类的一个实例。我们把它保存在'Module'类的成员
# 变量_modules中。_module的类型是OrderedDict
self._modules[str(idx)] = module
def forward(self, X):
# OrderedDict保证了按照成员添加的顺序遍历它们
for block in self._modules.values():
X = block(X)
return X
net = MySequential(nn.Linear(20, 256), nn.ReLU(), nn.Linear(256, 10))
net(X)
Module类中有一个_modules的字典,它的主要优点是:在模块的参数初始化过程中,系统知道在_modules字典中查找需要初始化参数的子块。
1.3 在前向传播函数中执行代码
Sequential类虽然简单,但是并不是所有的架构都是简单的顺序架构,有时候我们需要在前向传播中加入python的控制流。如:
class FixedHiddenMLP(nn.Module):
def __init__(self):
super().__init__()
# 不计算梯度的随机权重参数。因此其在训练期间保持不变
self.rand_weight = torch.rand((20, 20), requires_grad=False)
self.linear = nn.Linear(20, 20)
def forward(self, X):
X = self.linear(X)
# 使用创建的常量参数以及relu和mm函数
X = F.relu(torch.mm(X, self.rand_weight) + 1)
# 复用全连接层。这相当于两个全连接层共享参数
X = self.linear(X)
# 控制流
while X.abs().sum() > 1:
X /= 2
return X.sum()
在这个FixedHiddenMLP模型中,我们实现了一个隐藏层, 其权重(self.rand_weight)在实例化时被随机初始化,之后为常量。 这个权重不是一个模型参数,因此它永远不会被反向传播更新。 然后,神经网络将这个固定层的输出通过一个全连接层。
注意,在返回输出之前,模型做了一些不寻常的事情: 它运行了一个while循环,在L1范数大于1的条件下, 将输出向量除以2,直到它满足条件为止。 最后,模型返回了X中所有项的和。 注意,此操作可能不会常用于在任何实际任务中, 我们只展示如何将任意代码集成到神经网络计算的流程中。
我们也可以嵌套块:
class NestMLP(nn.Module):
def __init__(self):
super().__init__()
self.net = nn.Sequential(nn.Linear(20, 64), nn.ReLU(),
nn.Linear(64, 32), nn.ReLU())
self.linear = nn.Linear(32, 16)
def forward(self, X):
return self.linear(self.net(X))
chimera = nn.Sequential(NestMLP(), nn.Linear(16, 20), FixedHiddenMLP())
chimera(X)
1.4 效率问题
注:我们在模型中加入python的代码可能会拖慢执行速度,因为GPU上的运行极快,提高Python速度的最好方法是完全避免使用Python。
1.5 小结
-
一个块可以由许多层组成;一个块可以由许多块组成。
-
块可以包含代码。
-
块负责大量的内部处理,包括参数初始化和反向传播。
-
层和块的顺序连接由Sequential块处理。
二、参数管理
在本部分,我们将介绍一下内容:
- 访问参数,用于调试、诊断和可视化;
- 参数初始化;
- 在不同模型组件间共享参数。
先看下单隐藏层的多层感知机:
import torch
from torch import nn
net = nn.Sequential(nn.Linear(4, 8), nn.ReLU(), nn.Linear(8, 1))
X = torch.rand(size=(2, 4))
net(X)
2.1 参数访问
我们可以通过索引来访问模型的任意层,这就像模型是一个列表,列表中每个元素的state_dict属性存放参数。如:
print(net[0])
print(net[0].state_dict())
print(net[1])
print(net[2])
Linear(in_features=4, out_features=8, bias=True)
OrderedDict([('weight', tensor([[ 0.1200, 0.0939, 0.3031, 0.4134],
[ 0.3665, 0.2180, 0.0131, 0.4878],
[ 0.3440, -0.4701, 0.0074, 0.2202],
[-0.2532, -0.4209, 0.0032, 0.4046],
[ 0.4745, 0.0568, 0.1719, 0.2846],
[-0.1002, -0.3926, 0.0540, 0.2673],
[ 0.4484, 0.3800, -0.2103, -0.4893],
[-0.1503, 0.4347, 0.1127, 0.3866]])), ('bias', tensor([ 0.1516, -0.3084, 0.0946, 0.0946, -0.4010, 0.3626, -0.4877, 0.3704]))])
ReLU()
Linear(in_features=8, out_features=1, bias=True)
2.1.1 目标参数
注意,每个参数都表示为参数类的一个实例。 要对参数执行任何操作,首先我们需要访问底层的数值。 有几种方法可以做到这一点。有些比较简单,而另一些则比较通用。 下面的代码从第二个全连接层(即第三个神经网络层)提取偏置, 提取后返回的是一个参数类实例,并进一步访问该参数的值。
print(type(net[2].bias))
print(net[2].bias)
print(net[2].bias.data)
<class 'torch.nn.parameter.Parameter'>
Parameter containing:
tensor([-0.0291], requires_grad=True)
tensor([-0.0291])
参数是一个符合的对象,它具有值(.data)、梯度(.grad)和额外的信息属性.
net[2].weight.grad == None
2.1.2 访问所有参数
当我们需要对所有参数执行操作时,逐个访问它们可能会很麻烦。下面,我们将通过演示来比较访问第一个全连接层的参数和访问所有层。
print(*[(name, param.shape) for name, param in net[0].named_parameters()])
print(*[(name, param.shape) for name, param in net.named_parameters()])
('weight', torch.Size([8, 4])) ('bias', torch.Size([8]))
('0.weight', torch.Size([8, 4])) ('0.bias', torch.Size([8])) ('2.weight', torch.Size([1, 8])) ('2.bias', torch.Size([1]))
2.1.3 从嵌套块中收集参数
首先,我们定义一个生成块的函数:
def block1():
return nn.Sequential(nn.Linear(4, 8), nn.ReLU(),
nn.Linear(8, 4), nn.ReLU())
def block2():
net = nn.Sequential()
for i in range(4):
# 在这里嵌套
net.add_module(f'block {i}', block1())
return net
rgnet = nn.Sequential(block2(), nn.Linear(4, 1))
rgnet(X)
我们可以直接打印网络模型,看其结构:
print(rgnet)
Sequential(
(0): Sequential(
(block 0): Sequential(
(0): Linear(in_features=4, out_features=8, bias=True)
(1): ReLU()
(2): Linear(in_features=8, out_features=4, bias=True)
(3): ReLU()
)
(block 1): Sequential(
(0): Linear(in_features=4, out_features=8, bias=True)
(1): ReLU()
(2): Linear(in_features=8, out_features=4, bias=True)
(3): ReLU()
)
(block 2): Sequential(
(0): Linear(in_features=4, out_features=8, bias=True)
(1): ReLU()
(2): Linear(in_features=8, out_features=4, bias=True)
(3): ReLU()
)
(block 3): Sequential(
(0): Linear(in_features=4, out_features=8, bias=True)
(1): ReLU()
(2): Linear(in_features=8, out_features=4, bias=True)
(3): ReLU()
)
)
(1): Linear(in_features=4, out_features=1, bias=True)
)
通过索引打印参数:
rgnet[0][1][0].bias.data
2.2 参数初始化
知道了如何访问参数后, 我们需要看下如何正确的初始化参数。
默认情况下,PyTorch会根据一个范围均匀地初始化权重和偏置矩阵, 这个范围是根据输入和输出维度计算出的。 PyTorch的nn.init模块提供了多种预置初始化方法。
2.2.1 内置初始化
让我们首先调用内置的初始化器。 下面的代码将所有权重参数初始化为标准差为0.01的高斯随机变量, 且将偏置参数设置为0。
def init_normal(m):
if type(m) == nn.Linear:
nn.init.normal_(m.weight, mean=0, std=0.01)
nn.init.zeros_(m.bias)
net.apply(init_normal)
net[0].weight.data[0], net[0].bias.data[0]
net.apply是PyTorch中的一个方法,用于将一个函数应用到一个网络模型的所有参数上。
我们还可以将所有参数初始化为给定的常数,比如初始化为1。
def init_constant(m):
if type(m) == nn.Linear:
nn.init.constant_(m.weight, 1)
nn.init.zeros_(m.bias)
net.apply(init_constant)
net[0].weight.data[0], net[0].bias.data[0]
我们还可以对某些块应用不同的初始化方法。 例如,下面我们使用Xavier初始化方法初始化第一个神经网络层, 然后将第三个神经网络层初始化为常量值42。
def init_xavier(m):
if type(m) == nn.Linear:
nn.init.xavier_uniform_(m.weight)
def init_42(m):
if type(m) == nn.Linear:
nn.init.constant_(m.weight, 42)
net[0].apply(init_xavier)
net[2].apply(init_42)
print(net[0].weight.data[0])
print(net[2].weight.data)
2.2.2 自定义初始化
有时,深度学习框架没有提供我们需要的初始化方法。 在下面的例子中,我们使用以下的分布为任意权重参数w定义初始化方法:
w
∼
{
U
(
5
,
10
)
可能性
1
4
0
可能性
1
2
U
(
−
10
,
−
5
)
可能性
1
4
\begin{split}\begin{aligned} w \sim \begin{cases} U(5, 10) & \text{ 可能性 } \frac{1}{4} \\ 0 & \text{ 可能性 } \frac{1}{2} \\ U(-10, -5) & \text{ 可能性 } \frac{1}{4} \end{cases} \end{aligned}\end{split}
w∼⎩
⎨
⎧U(5,10)0U(−10,−5) 可能性 41 可能性 21 可能性 41
def my_init(m):
if type(m) == nn.Linear:
print("Init", *[(name, param.shape)
for name, param in m.named_parameters()][0])
nn.init.uniform_(m.weight, -10, 10)
m.weight.data *= m.weight.data.abs() >= 5
net.apply(my_init)
net[0].weight[:2]
我们也可以直接设置参数:
net[0].weight.data[:] += 1
net[0].weight.data[0, 0] = 42
net[0].weight.data[0]
2.2.3 参数绑定
有时我们希望在多个层间共享参数: 我们可以定义一个稠密层,然后使用它的参数来设置另一个层的参数。
# 我们需要给共享层一个名称,以便可以引用它的参数
shared = nn.Linear(8, 8)
net = nn.Sequential(nn.Linear(4, 8), nn.ReLU(),
shared, nn.ReLU(),
shared, nn.ReLU(),
nn.Linear(8, 1))
net(X)
# 检查参数是否相同
print(net[2].weight.data[0] == net[4].weight.data[0])
net[2].weight.data[0, 0] = 100 #修改一下一个层的参数
# 确保它们实际上是同一个对象,而不只是有相同的值
print(net[2].weight.data[0] == net[4].weight.data[0])
这个例子表明第三个和第五个神经网络层的参数是绑定的。 它们不仅值相等,而且由相同的张量表示。 因此,如果我们改变其中一个参数,另一个参数也会改变。 这里有一个问题:当参数绑定时,梯度会发生什么情况? 答案是由于模型参数包含梯度,因此在反向传播期间第二个隐藏层 (即第三个神经网络层)和第三个隐藏层(即第五个神经网络层)的梯度会加在一起。
三、延后初始化
延后初始化能让我们先定义整个模型,而不用关心它输入的维度。
import torch
from torch import nn
from d2l import torch as d2l
net = nn.Sequential(nn.LazyLinear(256), nn.ReLU(), nn.LazyLinear(10))
此时,我们看看权重:
net[0].weight
结果是:
<UninitializedParameter>
当我们给定输入时,模型会自定初始化参数:
X = torch.rand(2, 20)
net(X)
net[0].weight.shape
torch.Size([256, 20])
四、自定义层
深度学习成功背后的一个因素就是神经网络的灵活性,有时我们为了解决特定的问题需要自定义一个框架中不存在的层。目前我们已知的有Linear层,接下来我们展示如何自定义层。
4.1 不带参数的层
首先,我们构造一个没有任何参数的自定义层。下面的CenteredLayer类要从其输入中减去均值。 要构建它,我们只需继承基础层类并实现前向传播功能。
import torch
import torch.nn.functional as F
from torch import nn
class CenteredLayer(nn.Module):
def __init__(self):
super().__init__()
def forward(self, X):
return X - X.mean()
使用:
net = nn.Sequential(nn.Linear(8, 128), CenteredLayer())
Y = net(torch.rand(4, 8))
Y.mean()
结果为1个很小很小的数。
4.2 带参数的层
class MyLinear(nn.Module):
def __init__(self, in_units, units):
super().__init__()
self.weight = nn.Parameter(torch.randn(in_units, units))
self.bias = nn.Parameter(torch.randn(units,))
def forward(self, X):
linear = torch.matmul(X, self.weight.data) + self.bias.data
return F.relu(linear)
接下来我们实例化并访问参数:
linear = MyLinear(5, 3)
linear.weight
Parameter containing:
tensor([[ 1.9094, -0.8244, -1.6846],
[ 0.6850, 0.8366, -1.3837],
[ 0.0289, 2.0976, 1.3855],
[-0.8574, -0.3557, -0.4109],
[ 2.2963, -1.3008, 1.2173]], requires_grad=True)
使用:
net = nn.Sequential(MyLinear(64, 8), MyLinear(8, 1))
net(torch.rand(2, 64))
五、读写文件
到目前为止,我们讨论了如何处理数据, 以及如何构建、训练和测试深度学习模型。 然而,有时我们希望保存训练的模型, 以备将来在各种环境中使用(比如在部署中进行预测)。 此外,当运行一个耗时较长的训练过程时, 最佳的做法是定期保存中间结果, 以确保在服务器电源被不小心断掉时,我们不会损失几天的计算结果。 因此,现在是时候学习如何加载和存储权重向量和整个模型了。
5.1 加载和保存张量
对于单个张量,我们可以直接调用load和save函数分别读写它们。 这两个函数都要求我们提供一个名称,save要求将要保存的变量作为输入。
import torch
from torch import nn
from torch.nn import functional as F
x = torch.arange(4)
torch.save(x, 'x-file')
x2 = torch.load('x-file')
我们也可以保存一个张量列表或张量字典,然后再读取回来:
y = torch.zeros(4)
torch.save([x, y],'x-files')
x2, y2 = torch.load('x-files')
5.2 保存和加载模型参数
class MLP(nn.Module):
def __init__(self):
super().__init__()
self.hidden = nn.Linear(20, 256)
self.output = nn.Linear(256, 10)
def forward(self, x):
return self.output(F.relu(self.hidden(x)))
net = MLP()
X = torch.randn(size=(2, 20))
Y = net(X)
接下来,我们将模型的参数存储在一个叫做“mlp.params”的文件中。
torch.save(net.state_dict(), 'mlp.params')
加载:
clone = MLP()
clone.load_state_dict(torch.load('mlp.params'))
clone.eval() #将模型设置为预测模式 不反向传播更新参数
六、GPU
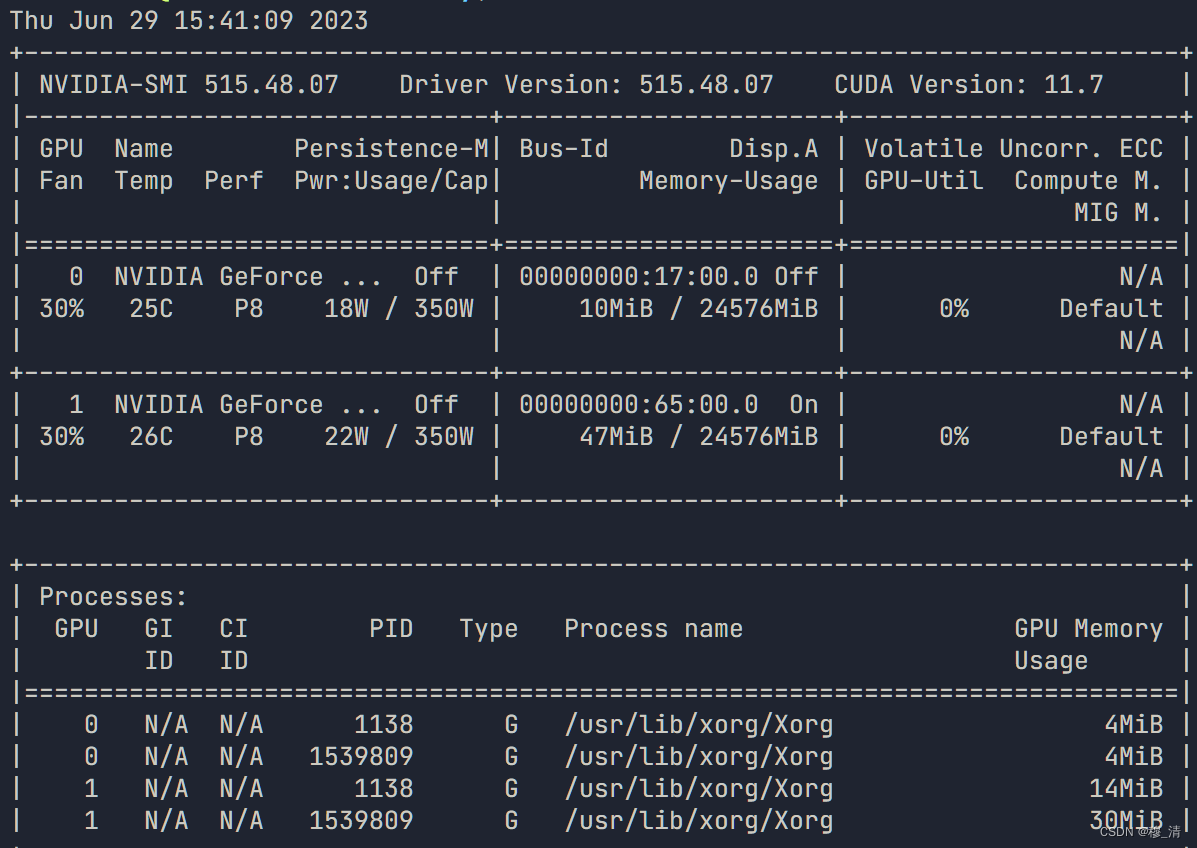
在命令行我们可以输入nvidia-smi查看GPU信息:
6.1 计算设备
在pytorch中,可以使用如下方法调用:
import torch
from torch import nn
torch.device('cpu'), torch.device('cuda'), torch.device('cuda:1')
查询可用gpu数:
torch.cuda.device_count()
6.2 张量与GPU
x = torch.tensor([1, 2, 3])
x.device #可以查看当前x张量在cpu还是gpu上
需要注意的是,无论何时我们要对多个项进行操作, 它们都必须在同一个设备上。 例如,如果我们对两个张量求和, 我们需要确保两个张量都位于同一个设备上, 否则框架将不知道在哪里存储结果,甚至不知道在哪里执行计算。
6.2.1 存储在GPU上
法一:
X = torch.ones(2, 3, device=torch.device('cuda:0')) #放到gpu0上
法二:
X = torch.ones(2, 3)
X.to(torch.device('cuda:0'))
法三:
X = torch.ones(2, 3)
X.cuda()
6.2.2 复制
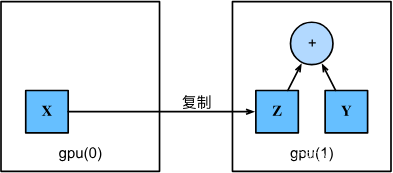
如果我们要计算X + Y,我们需要决定在哪里执行这个操作。 例如,如图所示, 我们可以将X传输到第二个GPU并在那里执行操作。 不要简单地X加上Y,因为这会导致异常, 运行时引擎不知道该怎么做:它在同一设备上找不到数据会导致失败。 由于Y位于第二个GPU上,所以我们需要将X移到那里, 然后才能执行相加运算。
Z = X.cuda(1)
print(X)
print(Z)
结果:
tensor([[1., 1., 1.],
[1., 1., 1.]], device='cuda:0')
tensor([[1., 1., 1.],
[1., 1., 1.]], device='cuda:1')
此时如果X+Z,则:
报错:RuntimeError: Expected all tensors to be on the same device, but found at least two devices, cuda:1 and cpu!
6.3 神经网络与GPU
我们也可以把模型放到GPU上:
net = nn.Sequential(nn.Linear(3, 1))
net = net.to(device=torch.device('cuda:0'))