一、前言
此示例演示如何使用迭代最近点 (ICP) 算法组合多个点云以重建三维场景。
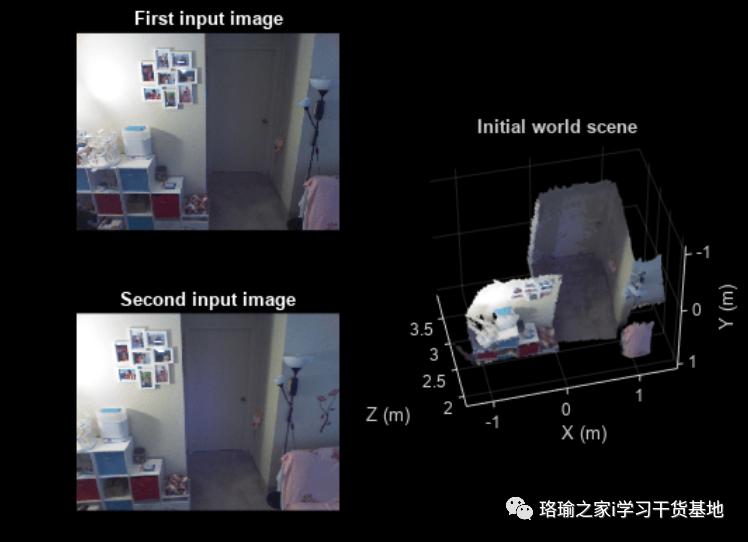
此示例将使用 Kinect 捕获的点云集合拼接在一起,以构建场景的更大三维视图。该示例将 ICP 应用于两个连续的点云。这种类型的重建可用于开发对象的 3D 模型或构建用于同时定位和映射 (SLAM) 的 3-D 世界地图。
二、注册两个点云
配准质量取决于数据噪声和ICP算法的初始设置。您可以应用预处理步骤来过滤噪声或设置适合您的数据的初始属性值。在这里,通过使用盒式网格过滤器进行缩减采样来预处理数据,并将网格过滤器的大小设置为 10cm。网格过滤器将点云空间划分为立方体。每个立方体内的点通过平均其 X,Y,Z 坐标组合成单个输出点。
为了对齐两个点云,我们使用ICP算法来估计下采样数据的三维刚性变换。我们使用第一个点云作为参考,然后将估计的变换应用于原始的第二个点云。我们需要将场景点云与对齐的点云合并以处理重叠的点。
首先找到用于将第二个点云与第一个点云对齐的刚性变换。使用它可将第二个点云转换为由第一个点云定义的参考坐标系。
现在,我们可以使用注册的数据创建世界场景。重叠区域使用 1.5cm 框网格过滤器进行过滤。增加合并大小可降低生成的场景点云的存储要求,减小合并大小可提高场景分辨率。
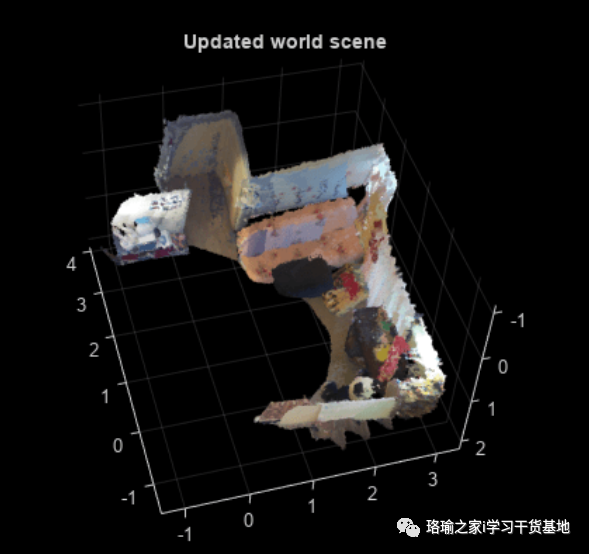
三、拼接一系列点云
要组成更大的 3D 场景,请重复与上述相同的过程来处理一系列点云。使用第一个点云建立参考坐标系。将每个点云转换为参考坐标系。此变换是成对变换的乘法。

四、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
程序下载:基于matlab使用迭代最近点算法组合多个点云以重建三维场景资源-CSDN文库