- 💂 个人主页: 同学来啦
- 🤟 版权: 本文由【同学来啦】原创、在CSDN首发、需要转载请联系博主
- 💬 如果文章对你有帮助,欢迎关注、点赞、收藏和订阅专栏哦
文章目录
- 🌟 一、能避障的脑控机器人导航
- 🌟 二、机器人在线导航实验
- 🌟 三、进一步优化算法,实现控速导航
近日,河北工业大学的研发团队提出了一项名为《CVT-Based Asynchronous BCI for Brian-Controlled Robot Navigation》的研究,旨在探索新的脑控技术。该研究论文发表在《Cyborg and Bionic Systems》上。
🌟 一、能避障的脑控机器人导航
研究人员们提供了基于质心维诺镶嵌(Centroidal Voronoi Tessellation, CVT)的道路分割方法,将机器人导航的可选区域进行cvt分割,转换为世界坐标,从而在道路区域中生成可选的导航目标,以供用户的任意目标选择。将基于EMG信号的异步机制引入 BCI 系统以进行自定步调控制,利用用户咬牙产生的EMG信号作为控制介入的开关,来辅助机器人进行不能自主完成的障碍躲避任务。
BCI 的事件相关电位设计用于目标选择以与机器人通信。机器人具有自主导航功能,可以到达用户选定的目标。该基于 CVT 的异步 (CVT-based asynchronous, CVT-A) BCI 系统由 4 个主要子系统组成:

如上图所示,该系统由信号处理系统、人机通信系统、道路选择系统和自主机器人系统组成。信号处理系统负责采集肌电图和脑电(Electroencephalography, EEG)图信号,并对其进行解码,以区分控制状态和空闲状态,并实现对机器人运动的控制。

8次咬牙时FC5通道的肌电信号,横轴表示采样点,纵轴表示振幅
人机通信系统负责向其他 3 个子系统发出命令,显示用户界面 (User interface, UI) 供用户监控系统状态和选择命令。

不同大脑状态下的用户界面 (A) 处于空闲状态的 UI (B) UI 处于控制状态
路径选择系统通过机器人获取环境图像,并将其转换为子目标坐标,以映射到人机通信系统。自主机器人系统接收来自人机通信系统的命令,并执行轨迹规划和运动控制。

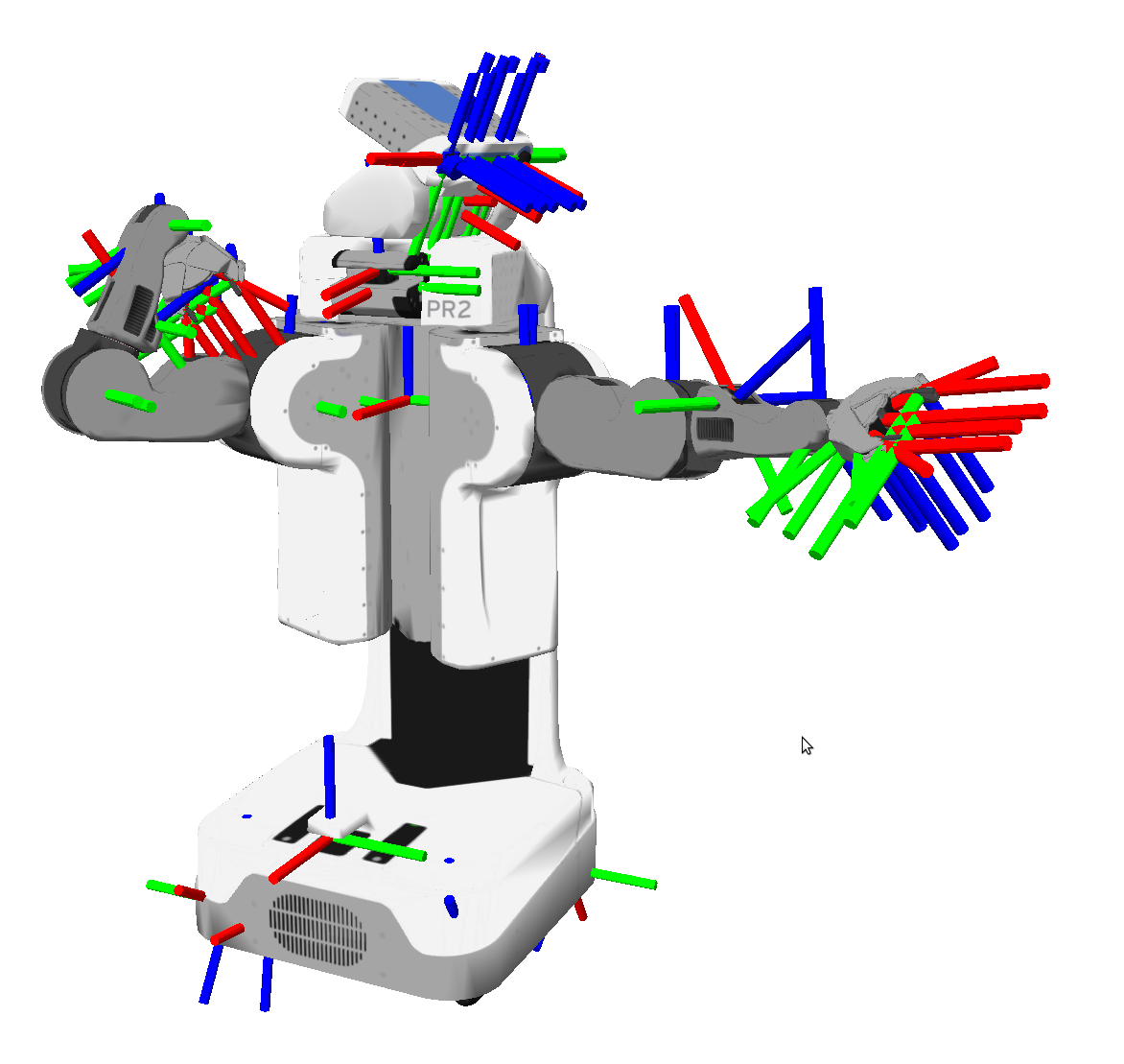
(A) 机器人的配置。(B) 机器人运动模型
自主机器人系统利用RGB-D相机和激光雷达感知环境,能够独立导航至预定目标地点。该系统采用基于雷达的同时定位和建图(simultaneous localization and mapping, SLAM)方法。在SLAM系统中,嵌入了Gmapping算法,这是一种粒子滤波算法,可基于雷达数据有效构建二维网格地图。在用户处于空闲状态时,机器人能自主导航至目标地点。而在用户处于控制状态时,系统会利用基于视觉的导航方法,以实现机器人导航到用户通过脑控选择的子目标。
系统切换至控制状态时,基于CVT的道路选择子系统开始运行。当遇到机器人无法独立躲避障碍物时,道路选择功能用于将路面区域进行分割定位,以便为受试提供可能的导航点选择。首先该子系统会提取机器人前方的路径区域,然后利用CVT方法分割道路区域并计算各区域的质心。最终,机器人前方道路中均匀分布的若干个点的坐标被提取出来,供用户进行路线选择以躲避障碍物。

路径区域提取过程
CVT-A BCI系统允许用户与机器人异步协作,用户执行高级决策,机器人进行低级控制,以协同完成导航任务。肌电信号(由咬牙产生)在此处充当“大脑状态开关”,帮助系统用户在空闲状态和控制状态间切换。在空闲状态下,机器人自主进行路径规划和运动控制;在控制状态下,用户控制机器人的动作或者设置机器人自主导航的目标。

CVT-A BCI 系统的流程图
🌟 二、机器人在线导航实验
为验证系统的有效性,研究者设定了一个460cm×225cm的实验场地进行实验,该场地由80cm高的挡板围成,内有两个35cm×60cm的极低障碍物,雷达无法探测。机器人的任务是从场地左上角出发,穿越并规避障碍物,最后到达右下角的目的地。

实验场景(A) 现实的实验场地(B) 雷达构建的环境地图
实验共有八名受试,他们被要求控制机器人导航至目的地,并执行避障任务。在整个实验过程中,实验采用了两种控制模式:单步(Single-step, SS) 模式)和CVT模式。SS模式控制机器人的单个动作,而CVT模式则设定机器人的路线导航目标。
实验结果显示,与单步SS模式相比,CVT-A BCI系统能够减少任务完成时间、减少指令次数,并优化导航路径。此外,CVT-A BCI系统的共享控制机制有助于在非结构化环境中,更好地实现人与机器人的集成控制,同时也降低了用户的操作负担。

8 名受试者在 SS 和 CVT 模式下的导航轨迹
🌟 三、进一步优化算法,实现控速导航
研究团队在该项目中采用的CVT方法能够生成一系列可选的导航目标,并能根据环境的变化进行实时调整。实验结果表明,当机器人决策错误时,该系统有其明显优势,人通过脑控接入机器人决策环节,降低整体人机系统的错误路线发生概率。未来,团队将进一步优化算法,以实现精准控速导航,以应对那些机器人更易出错的复杂环境。
如今,BCI技术已在军事、医疗、技术和家庭等多个领域得到应用。例如,通过脑控功能性电刺激实现中风康复,帮助患有运动障碍的患者抓取物品,从而提高其生活质量。对于残障人士和需要扩展交互能力的人群,BCI技术具有巨大的应用潜力。我们相信,随着新的BCI技术的出现,更多的“脑机神话”将会成为现实。