功能:
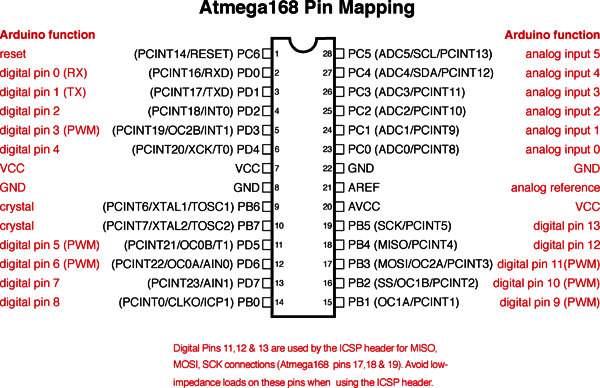
0.本项目采用STC89C52作为单片机系统的控制MCU
1.通过蓝牙发送指令控制LED灯
2.通过手机APP可以控制8路LED灯的亮灭,可以全亮全灭。
3.通过手机APP可以控制8路LED灯的亮度。每个灯的亮度有3档。具体控制指令如下
a)发送Ox,开启指定LED灯
b)发送Sx,关闭指定LED灯
c)发送Ax,开启指定LED灯,灯光等级1
d)发送Bx,开启指定LED灯,灯光等级2
e)发送Cx,开启指定LED灯,灯光等级3
x取1~8选择控制相应LED,取T控制所有LED灯
4.采用DC002作为电源接口可直接输入5V给整个系统供电
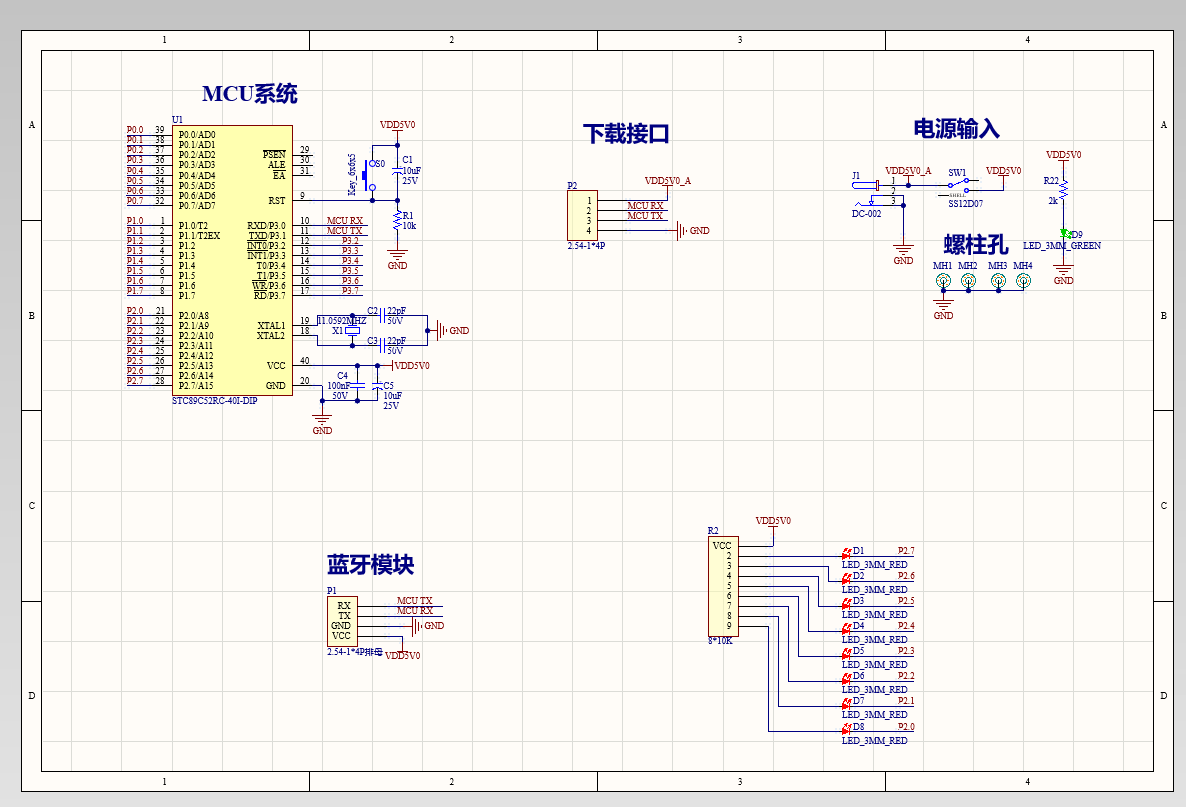
原理图:
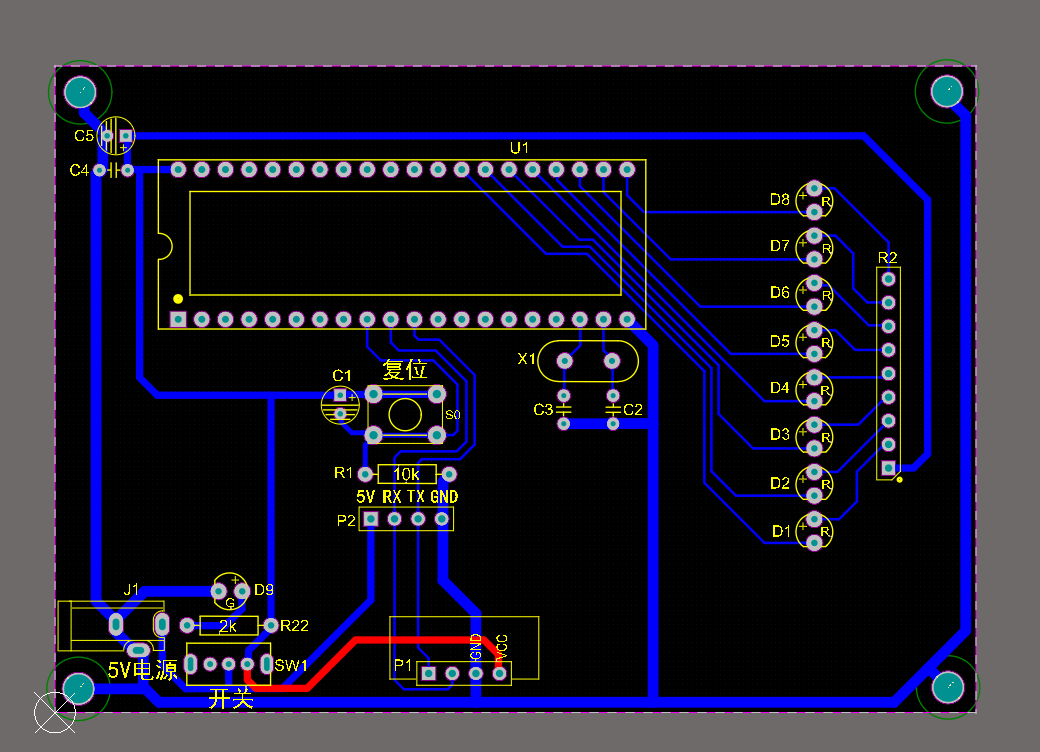
PCB :
主程序:
#include <reg52.h>
#include <intrins.h>
#include <stdio.h>
#include <math.h> //Keil library
#include "delay.h"
// 操作方法
// 蓝牙发送字符 CX或cX 表示关闭x位灯, x取值1-8
// 蓝牙发送字符 OX或oX 表示关闭x位灯, x取值1-8
sbit LED1 = P2^0; // 初始化led灯对应引脚
sbit LED2 = P2^1;
sbit LED3 = P2^2;
sbit LED4 = P2^3;
sbit LED5 = P2^4;
sbit LED6 = P2^5;
sbit LED7 = P2^6;
sbit LED8 = P2^7;
#define INIT 0xFF // 常量定义
#define OPEN 0x02
#define CLOSE 0x03
#define DAGN01 0x04
#define DAGN02 0x05
#define DAGN03 0x06
unsigned char Commd_Flag = INIT; // 命令接受标识
unsigned char pwmLed01 = 3; // pwm调整参数
unsigned char pwmLed02 = 3; // pwm调整参数
unsigned char pwmLed03 = 3; // pwm调整参数
unsigned char pwmLed04 = 3; // pwm调整参数
unsigned char pwmLed05 = 3; // pwm调整参数
unsigned char pwmLed06 = 3; // pwm调整参数
unsigned char pwmLed07 = 3; // pwm调整参数
unsigned char pwmLed08 = 3; // pwm调整参数
unsigned char countLed01 = 0; // pwm计数
unsigned char countLed02 = 0; // pwm计数
unsigned char countLed03 = 0; // pwm计数
unsigned char countLed04 = 0; // pwm计数
unsigned char countLed05 = 0; // pwm计数
unsigned char countLed06 = 0; // pwm计数
unsigned char countLed07 = 0; // pwm计数
unsigned char countLed08 = 0; // pwm计数
void UART_Init(void);
void SendByte(unsigned char dat);
void SendStr(unsigned char *s, unsigned char length);
void main(void)
{
UART_Init(); // 蓝牙 串口 波特率9600
LED1 = 0;
LED2 = 0;
LED3 = 0;
LED4 = 0;
LED5 = 0;
LED6 = 0;
LED7 = 0;
LED8 = 0;
DelayMs(200);
LED1 = 1; // 关闭相应的灯 并恢复命令标志
LED2 = 1;
LED3 = 1;
LED4 = 1;
LED5 = 1;
LED6 = 1;
LED7 = 1;
LED8 = 1;
DelayMs(10); // 延时有助于稳定
P2 = 0xFF;
while (1) // 主循环
{
; // 蓝牙的接收处理 均在中断中处理 请查看串口中断
countLed01++;
if (countLed01 < pwmLed01) // 占空比调节
{
LED1 = 0;
} // 打开
else if (countLed01 <= 10) // 关闭时间段
{
LED1 = 1; // 关闭
if (countLed01 == 10)
countLed01 = 0; // 一个周期结束
}
countLed02++;
if (countLed02 < pwmLed02) // 占空比调节
{
LED2 = 0;
} // 打开
else if (countLed02 <= 10) // 关闭时间段
{
LED2 = 2; // 关闭
if (countLed02 == 10)
countLed02 = 0; // 一个周期结束
}
countLed03++;
if (countLed03 < pwmLed03) // 占空比调节
{
LED3 = 0;
} // 打开
else if (countLed03 <= 10) // 关闭时间段
{
LED3 = 1; // 关闭
if (countLed03 == 10)
countLed03 = 0; // 一个周期结束
}
countLed04++;
if (countLed04 < pwmLed04) // 占空比调节
{
LED4 = 0;
} // 打开
else if (countLed04 <= 10) // 关闭时间段
{
LED4 = 1; // 关闭
if (countLed04 == 10)
countLed04 = 0; // 一个周期结束
}
countLed05++;
if (countLed05 < pwmLed05) // 占空比调节
{
LED5 = 0;
} // 打开
else if (countLed05 <= 10) // 关闭时间段
{
LED5 = 1; // 关闭
if (countLed05 == 10)
countLed05 = 0; // 一个周期结束
}
countLed06++;
if (countLed06 < pwmLed06) // 占空比调节
{
LED6 = 0;
} // 打开
else if (countLed06 <= 10) // 关闭时间段
{
LED6 = 1; // 关闭
if (countLed06 == 10)
countLed06 = 0; // 一个周期结束
}
countLed07++;
if (countLed07 < pwmLed07) // 占空比调节
{
LED7 = 0;
} // 打开
else if (countLed07 <= 10) // 关闭时间段
{
LED7 = 1; // 关闭
if (countLed07 == 10)
countLed07 = 0; // 一个周期结束
}
countLed08++;
if (countLed08 < pwmLed08) // 占空比调节
{
LED8 = 0;
} // 打开
else if (countLed08 <= 10) // 关闭时间段
{
LED8 = 1; // 关闭
if (countLed08 == 10)
countLed08 = 0; // 一个周期结束
}
}
}
void UART_Init(void)
{
SCON = 0x50; // SCON: 模式 1, 8-bit UART, 使能接收
TMOD |= 0x20; // TMOD: timer 1, mode 2, 8-bit 重装
TH1 = 0xFD; // TH1: 重装值 9600 波特率 晶振 11.0592MHz
TL1 = TH1;
TR1 = 1; // TR1: timer 1 打开
EA = 1; // 打开总中断
ES = 1; // 打开串口中断
}
void UART_SER(void) interrupt 4 // 串行中断服务程序
{
unsigned char R_buf;
if (RI) // 判断是接收中断产生
{
RI = 0; // 标志位清零
R_buf = SBUF;
if ((R_buf == 'O') || (R_buf == 'o'))
{
Commd_Flag = OPEN; // 接收到打开灯标志
}
else if ((R_buf == 'S') || (R_buf == 's'))
{
Commd_Flag = CLOSE; // 接收到 关闭灯标志
}
else if ((R_buf == 'A') || (R_buf == 'a'))
{
Commd_Flag = DAGN01; // 接收到 等级1标志
}
else if ((R_buf == 'B') || (R_buf == 'b'))
{
Commd_Flag = DAGN02; // 接收到 等级2标志
}
else if ((R_buf == 'C') || (R_buf == 'c'))
{
Commd_Flag = DAGN03; // 接收到 等级3标志
}
else if ((R_buf != '1') && (R_buf != '2') && (R_buf != '3') && (R_buf != '4') && (R_buf != '5') && (R_buf != '6') && (R_buf != '7') && (R_buf != '8') && (R_buf != 'T'))
{
Commd_Flag = INIT; // 否则 初始化接受标志
}
if ((Commd_Flag == OPEN) || (Commd_Flag == DAGN01)) // 根据命令值进行打开相应的灯
{
switch (R_buf)
{
case '1':
pwmLed01 = 3;
Commd_Flag = INIT;
break; // 打开相应的灯 并恢复命令标志
case '2':
pwmLed02 = 3;
Commd_Flag = INIT;
break;
case '3':
pwmLed03 = 3;
Commd_Flag = INIT;
break;
case '4':
pwmLed04 = 3;
Commd_Flag = INIT;
break;
case '5':
pwmLed05 = 3;
Commd_Flag = INIT;
break;
case '6':
pwmLed06 = 3;
Commd_Flag = INIT;
break;
case '7':
pwmLed07 = 3;
Commd_Flag = INIT;
break;
case '8':
pwmLed08 = 3;
Commd_Flag = INIT;
break;
case 'T':
pwmLed01 = 3;
pwmLed02 = 3;
pwmLed03 = 3;
pwmLed04 = 3;
pwmLed05 = 3;
pwmLed06 = 3;
pwmLed07 = 3;
pwmLed08 = 3;
Commd_Flag = INIT;
break;
default:
break; // 此处错误判断 不可恢复命令标准
}
}
else if (Commd_Flag == CLOSE) // 根据命令值进行关闭相应的灯
{
switch (R_buf)
{
case '1':
pwmLed01 = 1;
Commd_Flag = INIT;
break; // 打开相应的灯 并恢复命令标志
case '2':
pwmLed02 = 1;
Commd_Flag = INIT;
break;
case '3':
pwmLed03 = 1;
Commd_Flag = INIT;
break;
case '4':
pwmLed04 = 1;
Commd_Flag = INIT;
break;
case '5':
pwmLed05 = 1;
Commd_Flag = INIT;
break;
case '6':
pwmLed06 = 1;
Commd_Flag = INIT;
break;
case '7':
pwmLed07 = 1;
Commd_Flag = INIT;
break;
case '8':
pwmLed08 = 1;
Commd_Flag = INIT;
break;
case 'T':
pwmLed01 = 1;
pwmLed02 = 1;
pwmLed03 = 1;
pwmLed04 = 1;
pwmLed05 = 1;
pwmLed06 = 1;
pwmLed07 = 1;
pwmLed08 = 1;
Commd_Flag = INIT;
break;
default:
break; // 此处错误判断 不可恢复命令标准
}
}
else if (Commd_Flag == DAGN02) // 根据命令值进行关闭相应的灯
{
switch (R_buf)
{
case '1':
pwmLed01 = 6;
Commd_Flag = INIT;
break; // 打开相应的灯 并恢复命令标志
case '2':
pwmLed02 = 6;
Commd_Flag = INIT;
break;
case '3':
pwmLed03 = 6;
Commd_Flag = INIT;
break;
case '4':
pwmLed04 = 6;
Commd_Flag = INIT;
break;
case '5':
pwmLed05 = 6;
Commd_Flag = INIT;
break;
case '6':
pwmLed06 = 6;
Commd_Flag = INIT;
break;
case '7':
pwmLed07 = 6;
Commd_Flag = INIT;
break;
case '8':
pwmLed08 = 6;
Commd_Flag = INIT;
break;
case 'T':
pwmLed01 = 6;
pwmLed02 = 6;
pwmLed03 = 6;
pwmLed04 = 6;
pwmLed05 = 6;
pwmLed06 = 6;
pwmLed07 = 6;
pwmLed08 = 6;
Commd_Flag = INIT;
break;
default:
break; // 此处错误判断 不可恢复命令标准
}
}
else if (Commd_Flag == DAGN03) // 根据命令值进行关闭相应的灯
{
switch (R_buf)
{
case '1':
pwmLed01 = 9;
Commd_Flag = INIT;
break; // 打开相应的灯 并恢复命令标志
case '2':
pwmLed02 = 9;
Commd_Flag = INIT;
break;
case '3':
pwmLed03 = 9;
Commd_Flag = INIT;
break;
case '4':
pwmLed04 = 9;
Commd_Flag = INIT;
break;
case '5':
pwmLed05 = 9;
Commd_Flag = INIT;
break;
case '6':
pwmLed06 = 9;
Commd_Flag = INIT;
break;
case '7':
pwmLed07 = 9;
Commd_Flag = INIT;
break;
case '8':
pwmLed08 = 9;
Commd_Flag = INIT;
break;
case 'T':
pwmLed01 = 9;
pwmLed02 = 9;
pwmLed03 = 9;
pwmLed04 = 9;
pwmLed05 = 9;
pwmLed06 = 9;
pwmLed07 = 9;
pwmLed08 = 9;
Commd_Flag = INIT;
break;
default:
break; // 此处错误判断 不可恢复命令标准
}
}
SBUF = R_buf; // 返回接收到的数据
}
if (TI) // 如果是发送标志位,清零
TI = 0;
}
仿真演示视频:
https://www.bilibili.com/video/BV1JW4y1s7on/
实物演示视频:
https://www.bilibili.com/video/BV1rg411p7Ut/