输入输出
8086采用I/O端口独立编址
in AL/AX,imm8/DX
out imm8/DX,AL/AX
大于0FFH的端口只能存在DX
读外设(查询)
status:in al,dx
test al,80H;//测标志位
jz status
mov dx,100h
in al,dx
写外设(查询)
status:mov dx,102H
in al,dx
test al,80H
jnz status;//D7=1,忙,继续查
mov dx,100h
mov al,char
out dx,al
74LS273:锁存。输出锁存寄存器。
74LS244:缓冲。输入缓冲,输出锁存。
A
0
A_0
A0=0,
R
D
‾
=
1
\overline{RD}=1
RD=1,读IRR、ISR、查询自
A
0
A_0
A0=1,
R
D
‾
=
0
\overline{RD}=0
RD=0,读IMR
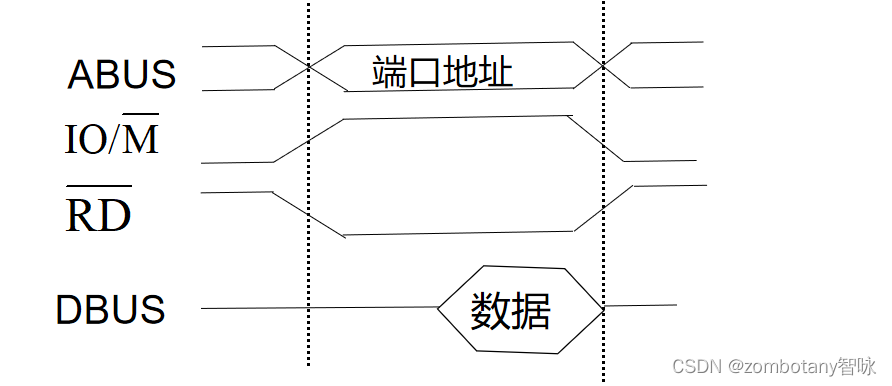
输入时序
输出时序

选通信号Ready将置1,状态口连在 D 7 D_7 D7上,选通信号置Ready
中断与8259
传送指令装入中断向量。
mov ax,0
mov es,ax
mov bx,N*4;//N为中断类型号
mov ax,offset intproc
mov es:[bx],ax
mov ax,seg intporc
mov es:[bx+2],ax
sti
内部中断:除法错误、溢出、指令单步、断点。
外部中断:NMI、INTR(高电平有效)。NMI类型号为2,边沿触发。
关中断情况:系统复位、中断被响应、CLI。
一条指令的结束是相应NMI的必要条件
普通屏蔽:IMR的
D
i
D_i
Di为1,对应
I
R
i
IR_i
IRi屏蔽。
特殊屏蔽:
I
R
i
IR_i
IRi被屏蔽时,
I
S
R
i
ISR_i
ISRi为0
中断结束:
I
S
R
ISR
ISR某位为0
EOI:非自动中断结束,全嵌套清楚优先级最高位。
特殊:配合循环优先权,发EOI清楚ISR对应位。
缓冲:多片级联。非缓冲:单片。
IRR中断请求寄存器,1表示对应位有请求,响应后复位。
IMR中断屏蔽寄存器,0表示允许中断
ISR中断服务寄存器,1表示在被服务
PR优先级判别。
优先级固定方式:从高到低为
I
R
0
IR_0
IR0,
I
R
1
IR_1
IR1,…
I
R
7
IR_7
IR7,完全嵌套
自动循环:初始
I
R
0
,
.
.
.
,
I
R
7
IR_0,...,IR_7
IR0,...,IR7,
I
R
i
IR_i
IRi被服务后,
I
R
i
IR_i
IRi最低,
I
R
i
+
1
m
o
d
8
IR_{i+1\mod 8}
IRi+1mod8最高
特殊循环:可设置初始最低优先级
普通全嵌套:禁止同级/低级优先权中断
特殊全嵌套:禁止低级中断,在主片。
S
P
‾
/
E
N
‾
\overline{SP}/\overline{EN}
SP/EN级联方式:主片
S
P
‾
=
1
\overline {SP}=1
SP=1,从片
S
P
‾
=
0
\overline{SP}=0
SP=0
I
R
0
.
.
.
I
R
7
IR_0...IR_7
IR0...IR7中断请求。
C
A
S
0
.
.
.
C
A
S
7
CAS_0...CAS_7
CAS0...CAS7级联引脚双相
C
A
S
2
.
.
.
C
A
S
0
CAS_2...CAS_0
CAS2...CAS0:主片输出、从片输入、级联信号
例如
A
0
=
0
,
W
R
‾
=
0
A_0=0,\overline{WR}=0
A0=0,WR=0,写
I
C
W
1
,
O
C
W
2
,
O
C
W
3
ICW_1,OCW_2,OCW_3
ICW1,OCW2,OCW3.
A
0
=
1
,
W
R
‾
=
0
A_0=1,\overline{WR}=0
A0=1,WR=0,写
I
C
W
2
−
I
C
W
4
,
O
C
W
1
ICW_2-ICW_4,OCW_1
ICW2−ICW4,OCW1
O
C
W
1
OCW_1
OCW1:中断屏蔽字寄存器,写
in al,81H
and al,11111101B;IR1开放中断
out 81H,al
O
C
W
2
OCW_2
OCW2:优先级循环方式和发中断结束命令
EOI=1发中断结束,清除相应位
O
C
W
3
OCW_3
OCW3:查询字
mov al,0AH;读IRR的OCW3
out 20H,al
in al,20H;读IRR到AL
中断服务子程序整体流程:保护现场、开中断、中断处理、关中断、恢复现场、中断返回。
intproc proc far
push ax
push ds
sti
mov ax,seg done
mov ds,ax
in al,0a0h;读开关状态
out 0c0h,al;输出控制led
cmp al,0ffh
jnz exit
int al,82h;中断屏蔽
or al,00000100B
out 82h,al
exit:
cli
mov al,20H;EOI
out 80H,al
pop ds
pop ax
iret
intproc endp
8255
D
0
−
D
7
D_0-D_7
D0−D7数据线,
A
0
−
A
1
A_0-A_1
A0−A1地址,
C
S
‾
\overline{CS}
CS片选,
P
A
0
−
P
A
7
PA_0-PA_7
PA0−PA7,
P
B
0
−
P
B
7
PB_0-PB_7
PB0−PB7,
P
C
0
−
P
C
7
PC_0-PC_7
PC0−PC7
A组:A口、C口高4位。B组:B口、C口低4位。
方式0:无条件/查询。
方式1/2:查询、中断
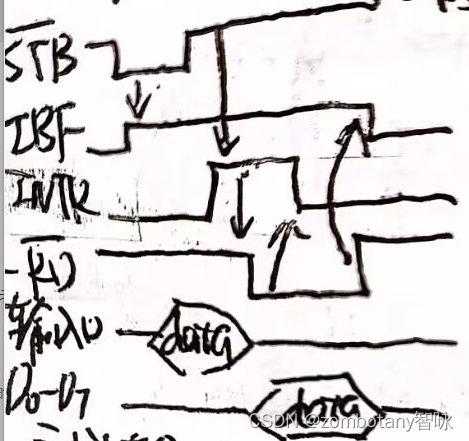
输入时,8255为数据缓冲。输出时,8255为数据锁存。可知已准备好数据。
方式1输入:
S
T
B
‾
\overline{STB}
STB选通(外设准备好数据,将数据锁存、输入)
IBF:输入缓冲区满则,输出
I
N
T
R
A
INTR_A
INTRA:中断请求,输出。
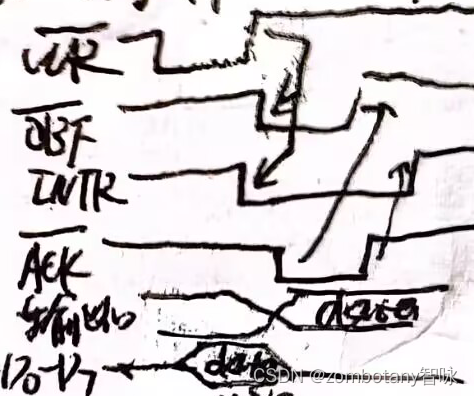
方式1输出:
O
B
F
‾
\overline{OBF}
OBF输入缓冲器满,可取走。
A
C
K
‾
\overline{ACK}
ACK:外设响应,输入,低有效。
I
N
T
R
INTR
INTR:中断请求,输出。
方式1输出时
O
B
F
‾
\overline{OBF}
OBF有效时输出,外设接受后回送
A
C
K
‾
\overline{ACK}
ACK。
方式2时外设提供
A
C
K
‾
\overline{ACK}
ACK后输出数据
| 短口 | P C i PC_i PCi | 输入 | 输出 |
|---|---|---|---|
| A端口 | P C 7 PC_7 PC7 | O B F ‾ \overline{OBF} OBF | |
| A端口 | P C 6 PC_6 PC6 | A C K A ‾ / I N T E A \overline{ACK_A}/INTE_A ACKA/INTEA | |
| A端口 | P C 5 PC_5 PC5 | I B F A IBF_A IBFA | |
| A端口 | P C 4 PC_4 PC4 | S T B A ‾ / I N T E A \overline{STB_A}/INTE_A STBA/INTEA | |
| A端口 | P C 3 PC_3 PC3 | I N T R A INTR_A INTRA | I N T R A INTR_A INTRA |
| B端口 | P C 2 PC_2 PC2 | S T B B ‾ / I N T E B \overline{STB_B}/INTE_B STBB/INTEB | A C K B ‾ / I N T E B \overline{ACK_B}/INTE_B ACKB/INTEB |
| B端口 | P C 1 PC_1 PC1 | I B F B IBF_B IBFB | O B F B ‾ \overline{OBF_B} OBFB |
| B端口 | P C 0 PC_0 PC0 | I N T R B INTR_B INTRB | I N T R B INTR_B INTRB |
输入时序图
输出时序图
方式控制字
| D 7 D_7 D7 | D 6 D_6 D6 | D 5 D_5 D5 | D 4 D_4 D4 | D 3 D_3 D3 | D 2 D_2 D2 | D 1 D_1 D1 | D 0 D_0 D0 |
|---|---|---|---|---|---|---|---|
| 1 | A方式高位 | A方式低位 | A输入输出 | P C 7 − P C 4 PC_7-PC_4 PC7−PC4输入输出 | B方式 | B输入输出 | P C 3 − P C 0 PC_3-PC_0 PC3−PC0输入输出 |
其中,0表示输出,1表示输入。
C口位控制字
| D 7 D_7 D7 | D 6 D_6 D6 | D 5 D_5 D5 | D 4 D_4 D4 | D 3 D_3 D3 | D 2 D_2 D2 | D 1 D_1 D1 | D 0 D_0 D0 |
|---|---|---|---|---|---|---|---|
| 0 | 无意义 | 无意义 | 无意义 | 选位 | 选位 | 选位 | 清零/置1 |
例:
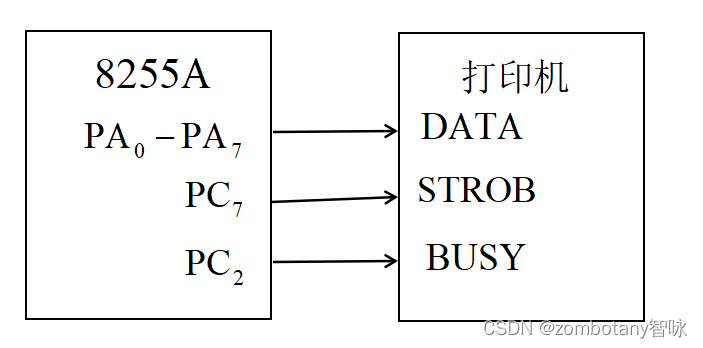
mov dx,303H
mov al,81H
out dx,al
mov al,0FH
out dx,al;(PC7=1)
prn:
mov dx,302H
in al,dx
test al,04h
jz prn;//查询输入
mov dx,300H;A口
mov al,ah;//ah=打印数据
out dx,al
mov dx,303H
mov al,0eH;STB#=0
out dx,al
nop
nop
mov al,0FH;STB#=1
out dx,al
8254/8253奇数骑
8254每个奇数骑内都有个计数单元、初值寄存器、输出锁存器。GATE控制奇数骑工作。
工作过程:设定工作方式、计数初值、硬件启动,计数初值送入奇数骑、每个clk使得奇数骑-1、计数结束。
方式2/3连续计数,GATE高电平计数,上升沿重新计数。
方式0/4由软件启动(重写计数初值)。1/5硬件启动(GATE上升沿),0/4在高电平计数。
out初始值:方式0在写控制后变低,其余变高。
方式1输出N个CLK负脉冲,方式5输出1个CLK负脉冲(与2/4波形相同,N-1高,1低)。
方式3:若计数值为偶数,输出
N
2
\frac N2
2N个clk高电平和低电平。若计数值为奇数,输出
N
+
1
2
\frac{N+1}2
2N+1个高电平和
N
−
1
2
\frac{N-1}2
2N−1个低电平。
方式0:计数结束中断。1:可编程硬件触发单稳负脉冲发生器
方式2:速率发生器。3:方波速率发生器。4:软件触发选通信号发生。5:硬件选通发生。
读出控制字:只有8254有,8253没有。
| D 7 D_7 D7 | D 6 D_6 D6 | D 5 D_5 D5 | D 4 D_4 D4 | D 3 D_3 D3 | D 2 D_2 D2 | D 1 D_1 D1 | 0 | |
|---|---|---|---|---|---|---|---|---|
| 读出控制字 | 1 | 1 | 0:锁存计数值 | 0:锁存状态 | 1:2# | 1:1# | 1:0# | 0 |
| 状态字 | OUT | isNULL | 读写格式 | 读写格式 | 工作方式 | 工作方式 | 工作方式 | 进制 |
输入时钟信号频率
F
c
l
k
F_{clk}
Fclk,周期
T
c
l
k
T_{clk}
Tclk,输出频率
F
o
u
t
F_{out}
Fout,周期
T
o
u
t
T_{out}
Tout
则
T
o
u
t
=
T
c
l
k
N
T_{out}=T_{clk}N
Tout=TclkN,
N
=
F
c
l
k
F
o
u
t
N=\frac{F_{clk}}{F_{out}}
N=FoutFclk,先写控制字,再写初值
某工厂计件系统,装一个零件产生一个脉冲接
C
L
K
0
CLK_0
CLK0,装100个后扬声器发声,则奇数骑0方式0,奇数骑1在方式3。
mov al,10H
mov dx,PORT_CTRL
out dx,al
mov al,100
mov dx,PORT_0
out dx,al
mov al,76H
mov dx,PORT_CTRL
out dx,al
mov ax,2000
mov dx,PORT_1
out dx,al
mov al,ah;写高8位
out dx,al
数字信号与模拟信号
单极性电压输出:
V
o
u
t
=
(
−
D
/
(
2
8
)
)
∗
V
R
E
F
V_{out}=(-D/(2^8))*V_{REF}
Vout=(−D/(28))∗VREF
双极性电压输出:
V
o
u
t
=
D
−
2
7
2
7
∗
V
R
E
F
V_{out}=\frac{D-2^7}{2^7}*V_{REF}
Vout=27D−27∗VREF
正负范围-5~5
ILE:数据输入,锁存允许
C
S
‾
\overline{CS}
CS:片选
W
R
1
‾
\overline{WR_1}
WR1:写数据
X
F
E
R
‾
\overline {X_{FER}}
XFER数据传送控制
W
R
2
‾
\overline{WR_2}
WR2:第二级写。当
X
F
E
R
‾
=
W
R
2
‾
=
0
\overline{X_{FER}}=\overline{WR_2}=0
XFER=WR2=0,开始转换
L
E
1
=
L
E
2
=
1
LE_1=LE_2=1
LE1=LE2=1直通,否则缓冲。
I
o
u
t
I_{out}
Iout输出电压
双缓冲控制:
mov dx,portx
out dx,xdata
mov dx,porty
out dx,ydata
mov ax,portcon
out dx,al
call delay
读8路电压转换
lea di,buf
mov cx,8
mov dx,300
convert:
out dx,al;启动转换
push dx
mov dx,310H
state:
in al,dx;读EOC
test al,20H;D5(EOC)为1?
jz state
pop dx
in al,dx;读取结果
mov [di],al
add dx,2;下一模拟通道
add di,2
loop convert
0832锯齿波
N
=
V
i
n
−
V
R
E
F
−
V
R
E
F
+
−
V
R
E
F
−
∗
2
8
N=\frac{V_{in}-V^-_{REF}}{V^+_{REF}-V^-_{REF}}*2^8
N=VREF+−VREF−Vin−VREF−∗28
mov dx,330H
mov al,00H
aga:
out dx,al
call delay
inc al
jmp aga
delay proc
push cx
mov cx,10
loop $
pop cx
ret
delay endp