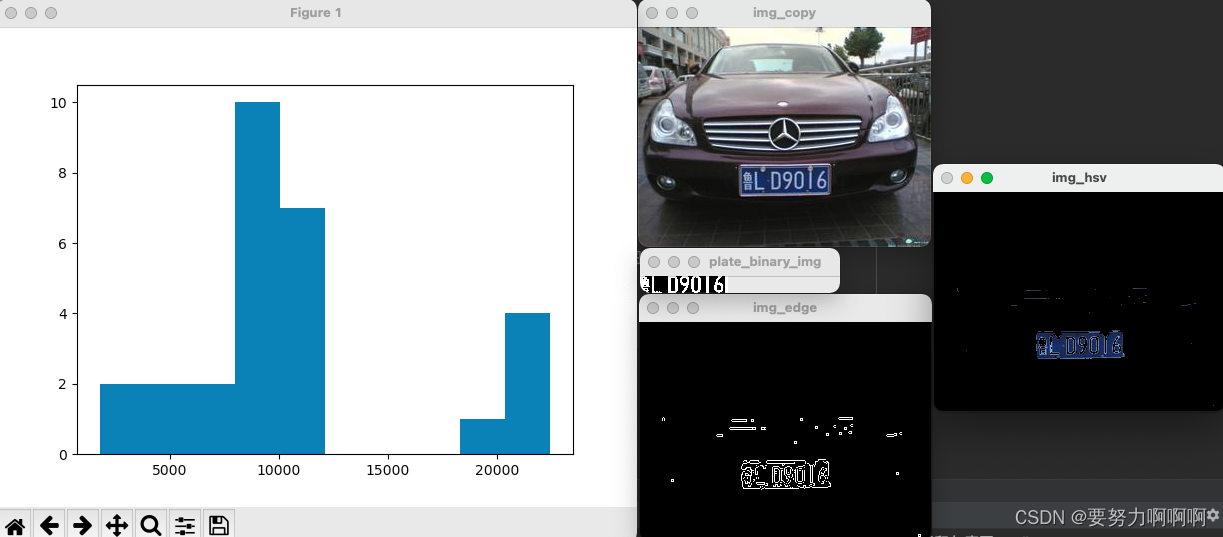
1.图片中的hsv
hsv提取蓝色部分
# hsv提取蓝色部分
def hsv_color_find(img):
img_copy = img.copy()
cv2.imshow('img_copy', img_copy)
"""
提取图中的蓝色部分 hsv范围可以自行优化
cv2.inRange()
参数介绍:
第一个参数:hsv指的是原图
第二个参数:在图像中低于这个数值的全部变为0
第二个参数:在图像中高于这个数值的全部变为0
在之间的变为255
图像中0-255。是变得越来越亮的
"""
hsv = cv2.cvtColor(img_copy, cv2.COLOR_BGR2HSV)
cv2.imshow('hsv',hsv)
low_hsv = np.array([100, 80, 80])#这里的阈值是自己进行设置的
high_hsv = np.array([124, 255, 255])
# 设置HSV的阈值
mask = cv2.inRange(hsv, lowerb=low_hsv, upperb=high_hsv)
cv2.imshow('mask',mask)
#show_pic('hsv_color_find', mask)#这里是得到黑白颜色的图片
# 将掩膜与图像层逐像素相加
#cv2.bitwise_and()是对二进制数据进行“与”操作,即对图像(灰度图像或彩色图像均可)每个像素值进行二进制“与”操作,1&1=1,1&0=0,0&1=0,0&0=0
res = cv2.bitwise_and(img_copy, img_copy, mask=mask)
cv2.imshow('res',res)
cv2.waitKey(0)
cv2.destroyAllWindows()
#show_pic('hsv_color_find2',res)#在这里得到蓝底黑字的照片
print('hsv提取蓝色部分完毕')
return res

2.对图片大小进行调整设置
但是在次张测试图片当中并未使用到这个代码,故不做过多的解释。
def resize_photo(imgArr,MAX_WIDTH = 1000):
"""
这个函数的作用就是来调整图像的尺寸大小,当输入图像尺寸的宽度大于阈值(默认1000),我们会将图像按比例缩小
输入: imgArr是输入的图像数字矩阵
输出: 经过调整后的图像数字矩阵
拓展:OpenCV自带的cv2.resize()函数可以实现放大与缩小,函数声明如下:
cv2.resize(src, dsize[, dst[, fx[, fy[, interpolation]]]]) → dst
其参数解释如下:
src 输入图像矩阵
dsize 二元元祖(宽,高),即输出图像的大小
dst 输出图像矩阵
fx 在水平方向上缩放比例,默认值为0
fy 在垂直方向上缩放比例,默认值为0
interpolation 插值法,如INTER_NEAREST,INTER_LINEAR,INTER_AREA,INTER_CUBIC,INTER_LANCZOS4等
"""
img = imgArr
rows, cols= img.shape[:2] #获取输入图像的高和宽
if cols > MAX_WIDTH:
change_rate = MAX_WIDTH / cols
img = cv2.resize(img ,( MAX_WIDTH ,int(rows * change_rate) ), interpolation = cv2.INTER_AREA)
return img
3.在此主要进行高级形态的转换
找到一些可能是车牌的一些距形区域,主要运用的是开运算和闭运算的来切换。

4.画出来轮廓
# 根据findContours返回的contours 画出轮廓
def draw_contours(img, contours):
for c in contours:
x, y, w, h = cv2.boundingRect(c)#这个函数就是用来返回值使用的。
"""
传入一个轮廓图像,返回 x y 是左上角的点, w和h是矩形边框的宽度和高度
"""
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 255, 0), 2)#进行画图使用
"""
画出矩形
img 是要画出轮廓的原图
(x, y) 是左上角点的坐标
(x+w, y+h) 是右下角的坐标
0,255,0)是画线对应的rgb颜色
2 是画出线的宽度
"""
# 获得最小的矩形轮廓 可能带旋转角度
rect = cv2.minAreaRect(c)
# 计算最小区域的坐标
box = cv2.boxPoints(rect)
# 坐标规范化为整数
box = np.int0(box)
# 画出轮廓
cv2.drawContours(img, [box], 0, (0, 255, 0), 3)
#show_pic('contours', img)
cv2.imshow("contours", img)
cv2.waitKey(0)
cv2.destroyAllWindows()

5.根据车牌的一些物理特征(面积等)对所得的矩形进行过滤
def chose_licence_plate(contours, Min_Area=2000):
"""
这个函数根据车牌的一些物理特征(面积等)对所得的矩形进行过滤
输入:contours是一个包含多个轮廓的列表,其中列表中的每一个元素是一个N*1*2的三维数组
输出:返回经过过滤后的轮廓集合
拓展:
(1) OpenCV自带的cv2.contourArea()函数可以实现计算点集(轮廓)所围区域的面积,函数声明如下:
contourArea(contour[, oriented]) -> retval
其中参数解释如下:
contour代表输入点集,此点集形式是一个n*2的二维ndarray或者n*1*2的三维ndarray
retval 表示点集(轮廓)所围区域的面积
(2) OpenCV自带的cv2.minAreaRect()函数可以计算出点集的最小外包旋转矩形,函数声明如下:
minAreaRect(points) -> retval
其中参数解释如下:
points表示输入的点集,如果使用的是Opencv 2.X,则输入点集有两种形式:一是N*2的二维ndarray,其数据类型只能为 int32
或者float32, 即每一行代表一个点;二是N*1*2的三维ndarray,其数据类型只能为int32或者float32
retval是一个由三个元素组成的元组,依次代表旋转矩形的中心点坐标、尺寸和旋转角度(根据中心坐标、尺寸和旋转角度
可以确定一个旋转矩形)
(3) OpenCV自带的cv2.boxPoints()函数可以根据旋转矩形的中心的坐标、尺寸和旋转角度,计算出旋转矩形的四个顶点,函数声明如下:
boxPoints(box[, points]) -> points
其中参数解释如下:
box是旋转矩形的三个属性值,通常用一个元组表示,如((3.0,5.0),(8.0,4.0),-60)
points是返回的四个顶点,所返回的四个顶点是4行2列、数据类型为float32的ndarray,每一行代表一个顶点坐标
"""
temp_contours = []
for contour in contours:
if cv2.contourArea(contour) > Min_Area:
temp_contours.append(contour)
car_plate1 = []
car_plate2 = []
car_plate3 = []
for temp_contour in temp_contours:
rect_tupple = cv2.minAreaRect(temp_contour)
rect_width, rect_height = rect_tupple[1]
if rect_width < rect_height:
rect_width, rect_height = rect_height, rect_width
aspect_ratio = rect_width / rect_height
# 中国:蓝牌和黑牌是440×140,黄牌前牌尺寸同,后牌为440×220;摩托车及轻便摩托车前牌是220×95,后牌是220×140。
# 车牌正常情况下宽高比在2 - 3.15之间 稍微放宽点范围
if aspect_ratio > 1.5 and aspect_ratio < 4.65:
car_plate1.append(temp_contour)
rect_vertices = cv2.boxPoints(rect_tupple)
rect_vertices = np.int0(rect_vertices)
# print(temp_contour)
print('一次筛查后,符合比例的矩形有' + str(len(car_plate1)) + '个')
# 二次筛查 如果符合尺寸的矩形大于1,则缩小宽高比
if len(car_plate1) > 1:
for temp_contour in car_plate1:
rect_tupple = cv2.minAreaRect(temp_contour)
rect_width, rect_height = rect_tupple[1]
if rect_width < rect_height:
rect_width, rect_height = rect_height, rect_width
aspect_ratio = rect_width / rect_height
# 中国:蓝牌和黑牌是440×140,黄牌前牌尺寸同,后牌为440×220;摩托车及轻便摩托车前牌是220×95,后牌是220×140。
# 车牌正常情况下宽高比在2 - 3.15之间 稍微放宽点范围
if aspect_ratio > 1.6 and aspect_ratio < 4.15:
car_plate2.append(temp_contour)
rect_vertices = cv2.boxPoints(rect_tupple)
rect_vertices = np.int0(rect_vertices)
print('二次筛查后,符合比例的矩形还有' + str(len(car_plate2)) + '个')
# 三次筛查 如果符合尺寸的矩形大于1,则缩小宽高比
if len(car_plate2) > 1:
for temp_contour in car_plate2:
rect_tupple = cv2.minAreaRect(temp_contour)
rect_width, rect_height = rect_tupple[1]
if rect_width < rect_height:
rect_width, rect_height = rect_height, rect_width
aspect_ratio = rect_width / rect_height
# 中国:蓝牌和黑牌是440×140,黄牌前牌尺寸同,后牌为440×220;摩托车及轻便摩托车前牌是220×95,后牌是220×140。
# 车牌正常情况下宽高比在2 - 3.15之间 稍微放宽点范围
if aspect_ratio > 1.8 and aspect_ratio < 3.35:
car_plate3.append(temp_contour)
rect_vertices = cv2.boxPoints(rect_tupple)
rect_vertices = np.int0(rect_vertices)
print('三次筛查后,符合比例的矩形还有' + str(len(car_plate3)) + '个')
if len(car_plate3) > 0:
return car_plate3
if len(car_plate2) > 0:
return car_plate2
return car_plate1
# 根据得到的车牌定位,将车牌从原始图像中截取出来,并存在指定目录中。
def license_segment(car_plates, out_path):
"""
此函数根据得到的车牌定位,将车牌从原始图像中截取出来,并存在指定目录中。
输入: car_plates是经过初步筛选之后的车牌轮廓的点集
输出: out_path是车牌的存储路径
"""
i = 0
if len(car_plates) == 1:
for car_plate in car_plates:
row_min, col_min = np.min(car_plate[:, 0, :], axis=0)
row_max, col_max = np.max(car_plate[:, 0, :], axis=0)
cv2.rectangle(img, (row_min, col_min), (row_max, col_max), (0, 255, 0), 2)
card_img = img[col_min:col_max, row_min:row_max, :]
cv2.imwrite(out_path + "/card_img" + str(i) + ".jpg", card_img)
#cv2.imshow("card_img" + str(i) + ".jpg", card_img)
i += 1
# cv2.waitKey(0)
# cv2.destroyAllWindows()
print('共切出' + str(i) + '张车牌图。')
return out_path + "/card_img0.jpg"
6.此函数根据得到的车牌定位,将车牌从原始图像中截取出来,并存在指定目录中。
def license_segment(car_plates, out_path):
"""
此函数根据得到的车牌定位,将车牌从原始图像中截取出来,并存在指定目录中。
输入: car_plates是经过初步筛选之后的车牌轮廓的点集
输出: out_path是车牌的存储路径
"""
i = 0
if len(car_plates) == 1:
for car_plate in car_plates:
row_min, col_min = np.min(car_plate[:, 0, :], axis=0)
row_max, col_max = np.max(car_plate[:, 0, :], axis=0)
cv2.rectangle(img, (row_min, col_min), (row_max, col_max), (0, 255, 0), 2)#hauchu画出来外接矩形
card_img = img[col_min:col_max, row_min:row_max, :]
cv2.imwrite(out_path + "/card_img" + str(i) + ".jpg", card_img)
i += 1
#显示图片所用
# cv2.imshow("card_img" + str(i) + ".jpg", card_img)
# cv2.waitKey(0)
# cv2.destroyAllWindows()
print('共切出' + str(i) + '张车牌图。')
return out_path + "/card_img0.jpg"

7.
参考链接:
https://blog.csdn.net/lukas_ten/article/details/115149086
https://blog.csdn.net/sunny2038/article/details/9137759
https://blog.csdn.net/wzh191920/article/details/79589506
https://blog.csdn.net/weixin_41695564/article/details/79712393
https://blog.csdn.net/Ikaros_521/article/details/121516173