原视频为左程云的B站教学
文章目录
- 1 二分法
- 1.1 在`有序`数组中查找特定元素
- 1.2 在一个有序数组中查找>=某个数的最左侧的位置
- 1.3 在一个有序数组中查找<=某个数最右侧位置
- 1.4 局部最小值问题(无序数组使用二分法的案例)
- 2 简单的递归思想
1 二分法
二分法(Binary Search)是一种在有序数组中查找特定元素的搜索算法。它的基本思想是将数组从中间分割,然后判断目标元素与中间元素的大小关系,以确定目标元素在左半部分还是右半部分。然后再在相应的子数组中继续进行同样的操作,直到找到目标元素或确定目标元素不存在。
具体步骤如下:
- 将数组的左边界设为 left,右边界设为 right。
- 计算中间位置 mid,即 mid = (left + right) / 2。
- 比较目标元素与中间元素的大小关系:
- 如果目标元素等于中间元素,则找到目标元素,返回其索引。
- 如果目标元素小于中间元素,则更新右边界 right = mid - 1,并继续在左半部分进行二分查找。
- 如果目标元素大于中间元素,则更新左边界 left = mid + 1,并继续在右半部分进行二分查找。
- 重复步骤 2 和步骤 3,直到找到目标元素或左边界大于右边界。
时间复杂度O(logN),其中 n 是数组的长度。由于每次都将搜索范围减半,因此算法的效率非常高。但要求数组是有序的,否则无法应用二分法进行查找。
1.1 在有序数组中查找特定元素
基本思想是通过比较中间元素与目标元素的大小关系,将查找范围缩小一半,直到找到目标元素或查找范围为空为止。
因为比如说数组个数为N=16, 最差的情况要分 4 次 ( [ 8 ∣ 8 ] → [ 4 ∣ 4 ] → [ 2 ∣ 2 ] → [ 1 ∣ 1 ] ) ( [8|8] \to [4|4] \to [2|2] \to [1|1] ) ([8∣8]→[4∣4]→[2∣2]→[1∣1]),而 4 = l o g 2 16 4 = log_216 4=log216。即时间复杂度为 O ( l o g N ) O(logN) O(logN)
/* 注意:题目保证数组不为空,且 n 大于等于 1 ,以下问题默认相同 */
int binarySearch(std::vector<int>& arr, int value)
{
int left = 0;
int right = arr.size() - 1;
// 如果这里是 int right = arr.size() 的话,那么下面有两处地方需要修改,以保证一一对应:
// 1、下面循环的条件则是 while(left < right)
// 2、循环内当 array[middle] > value 的时候,right = middle
while (left <= right)
{
int middle = left + ((right - left) >> 1); // 不用right+left,避免int溢出,且更快
if (array[middle] > value)
right = middle - 1;
else if (array[middle] < value)
left = middle + 1;
else
return middle;
// 可能会有读者认为刚开始时就要判断相等,但毕竟数组中不相等的情况更多
// 如果每次循环都判断一下是否相等,将耗费时间
}
return -1;
}
留意 left + ((right - left) >> 1) 结果等用于(right + left) / 2,但更快,且不会int溢出
1.2 在一个有序数组中查找>=某个数的最左侧的位置
思路依然是二分法,不同于查找某个值找到目标值就停止二分,找最左/右侧位置问题一定是二分到底
int nearLeftSearch(const std::vector<int>& arr, int target)
{
int left = 0;
int right = arr.size() - 1;
int result = -1;
while (left <= right)
{
int mid = left + ((right - left) >> 1);
if (target <= arr[mid]){ // 目标值小于等于mid,就要往左继续找
result = mid;// 暂时记录下这个位置,因为左边可能全都比目标值小了,就已经找到了
right = mid - 1;
} else{ // target > arr[mid]
left = mid + 1;
}
}
return result;
}
1.3 在一个有序数组中查找<=某个数最右侧位置
- 如果中间元素大于目标值,说明目标值应该在左半部分,因此我们将搜索范围缩小到左半部分,将 right 更新为 mid - 1。
- 如果中间元素小于或等于目标值,说明目标值应该在右半部分或就是当前位置,因此我们更新 result 为当前中间索引 mid,以便记录找到的最右侧位置,并将搜索范围缩小到右半部分,将 left 更新为 mid + 1。
int nearRightSearch(const std::vector<int>& arr, int target)
{
int left = 0;
int right = arr.size() - 1;
int result = -1;
while (left <= right) {
int mid = left + (right - left) / 2;
if (target < arr[mid]) {
right = mid - 1;
} else { // target >= arr[mid]
result = mid;
left = mid + 1;
}
}
return result;
}
1.4 局部最小值问题(无序数组使用二分法的案例)
数组arr无序,任意相邻的两个数不等,求一个局部最小的位置(极小值),要求时间复杂度优于O(N)
无序也能二分,只要目标问题在某一边必有解,另一边无所谓,就能够使用二分
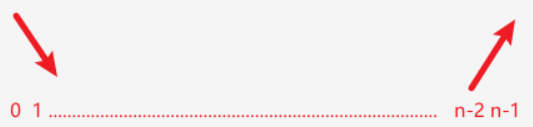
1.先判断数组两个边界
- 如果左边界arr[0] < arr[1],已找到
- 如果有边界arr[n-1] < arr[n-2],已找到
- 如果两个边界都不是局部最小,又因为任意相邻的两个数不等,则左边界局部单调递减,右边界处局部单调递增。所以在数组内,必然有极小值点
2.进行二分,判断mid与相邻位置的关系,分为3种情况: (提醒:数组中相邻两个元素是不相等的!)
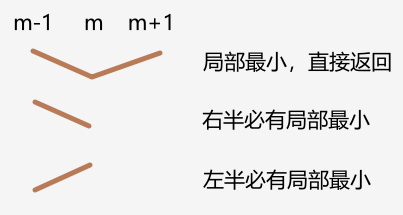
3.重复过程2直到找到极小值
int LocalMinimumSearch(const std::vector<int>& arr)
{
int n = arr.size();
// 先判断元素个数为0,1的情况,如果题目给出最少元素个>1数则不需要判断
if (n == 0) return -1;
if (n == 1) return 0; // 只有一个元素,则是局部最小值
if (arr[0] < arr[1]) return 0;
int left = 0;
int right = n - 1;
// 再次提醒,数组中相邻两个元素是不相等的!
while (left < right)
{
int mid = left + ((right - left) >> 1);
if (arr[mid] < arr[mid - 1] && arr[mid] < arr[mid + 1]) {
return mid; // 找到局部最小值的位置
} else if (arr[mid - 1] < arr[mid]) {
right = mid - 1; // 局部最小值可能在左侧
} else {
left = mid + 1; // 局部最小值可能在右侧
}
}
// 数组中只有一个元素,将其视为局部最小值
return left;
}
2 简单的递归思想
来自左哥P4开头部分,属于归并排序的前置知识。这里也用到二分法。主要是理解执行过程
例题:在数组的指定范围上求最大值,利用递归实现
#incldue <vector>
#include <algorithm>
int process(const std::vector<int>& arr, int L, int R)
{
if (L == R) return arr[L];
int mid = L + ((R - L) >> 1); // 求中点,右移1位相当于除以2
int leftMax = process(arr, L, mid);
int rightMax = process(arr, mid + 1, R);
return std::max(leftMax, rightMax);
}
当调用 process(arr, L, R) 函数时,它会执行以下操作:
- 首先,检查递归终止条件。如果 L 和 R 相等,表示递归到了数组的最小区间,只有一个元素。这时直接返回该元素 arr[L]。
- 如果没有满足终止条件,说明需要继续进行递归。首先,计算中点 mid,将区间 [L, R] 平分为两个子区间 [L, mid] 和 [mid+1, R]。
- 然后,递归调用 process(arr, L, mid),处理左子区间。这一步会将当前函数压栈,进入一个新的递归层级。
- 在新的递归层级中,再次执行步骤 1-3,直到满足终止条件,返回左子区间的最大值 leftMax。
- 接着,递归调用 process(arr, mid+1, R),处理右子区间。同样地,这一步会将当前函数压栈,进入另一个新的递归层级。
- 在新的递归层级中,再次执行步骤 1-3,直到满足终止条件,返回右子区间的最大值 rightMax。
- 最后,将左右子区间的最大值 leftMax 和 rightMax 比较,取其中较大的值作为整个区间 [L, R]
的最大值,并将其作为结果返回。 - 当递归返回到上一层时,将得到的最大值传递给上一层,直到返回到最初的调用点,得到整个数组的最大值。
递归的过程中,每一次递归调用都会创建一个新的函数栈帧,保存函数的局部变量和参数。当满足终止条件时,递归开始回溯,逐层返回最终结果,同时每层的局部变量和参数也被销毁,函数栈帧依次出栈。
依赖关系图
- 假设目标数组是[3, 2, 5, 6, 7, 4],调用process(0,5)找最大值, 形参arr省略不写了
- 红色数字为process的执行流程,其中省略了std::max的比较并返回的过程
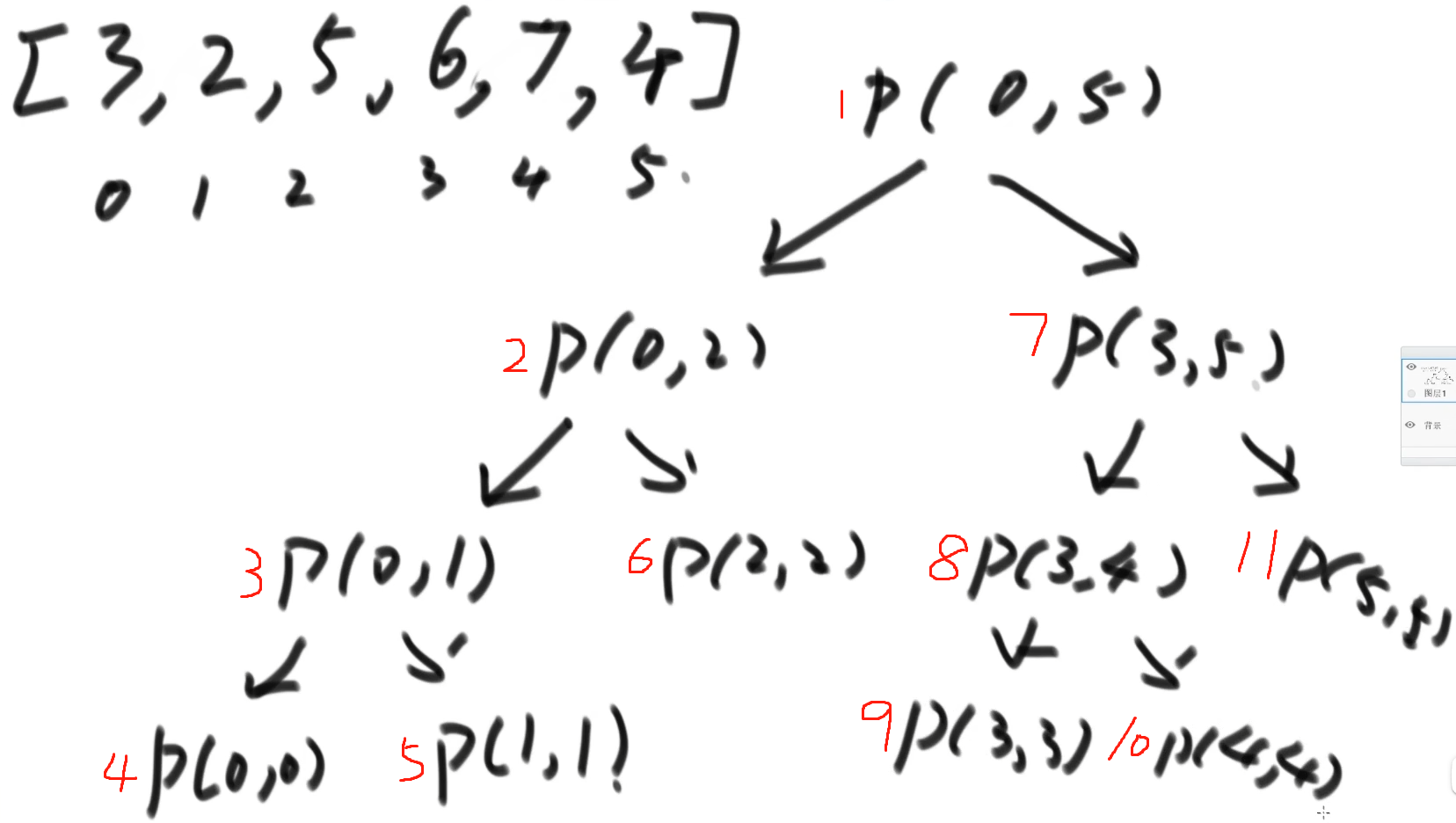
说人话描述这个过程:要想得到数组的返回值,即第
1步的返回值,首先要得到2的最大值,而它的最大值根据代码来看要先执行3,同样3又要先执行4,等二分到4这个步骤时,只有一个元素了 L==R,看代码 该元素即为当前(0,0)区间的最大值了,返回给3,3拿到leftMax后,还需要右边部分最大值,就执行5,拿到rightMax,最后对左右区间的最大值做比较,拿到(0,1)区间的最大值,又返回给2,2还需要6,6返回后,2比较后得到(0,2)的最大值,返回给1。然后执行右边的。。。。后面就省略了