原创 | 文 BFT机器人
01
研究内容
论文的主要研究内容是基于平面双关节机器人的相机姿态分析和评估。研究旨在分析相机的位置调整和一般数据分析,讨论人体姿势的平衡、关节运动的控制以及相机速率的估计和控制。
通过有限相机技术的应用,有效解决平面摄影的问题,并给出了摄影和运动的测量结果。该研究的意义在于解决平面相机运动中的人体姿势平衡问题,并通过支持关节扭矩的控制输入实现人体运动。
- 平面双关节机器人的相机位置调整
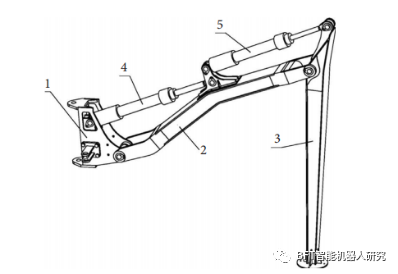

图一:平面双关节机器人相机通用位姿
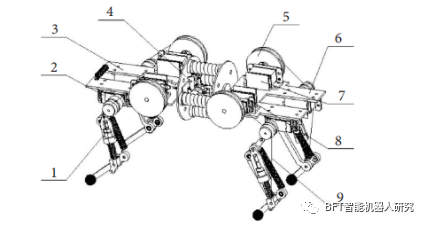
图二:双关节机器人摄像机位姿变换
图三:双关节机器人的单关节相机位姿。
02
论文原理
- 通过分析人体运动系统的运动方程,利用反馈线性化方法控制人体运动。
- 通过研究外部干扰对人体运动的影响,建立局部干扰模型,并使用简单的数学建模方法预测外部因素的干扰,作为前向反馈控制器来获得前向反馈。
- 通过比较不同比例的双关节机器人,得出姿态平衡的最优控制指标。
- 利用有限相机技术解决平面摄影的问题,实现相机的位置调整和一般数据分析,给出摄影和运动的测量结果
03
哪些关键技术的进步促进了平面双关节机器人的发展?
关键技术的进步包括机械、材料、电子、计算机、传感器、驱动、智能控制、人工智能等方面。这些技术的进步使得平面双关节机器人在过去几十年中在许多方面取得了重大突破,特别是在实际相机和姿态分析方面。
04
相机的能力如何影响机器人在复杂工作环境中的表现?
在复杂的工作环境中,机器人需要能够快速、准确地获取环境信息,以便做出正确的决策。相机的能力直接影响机器人获取环境信息的质量和效率。
因此,需要找到一种更稳定和有效的相机模式,以提高机器人的移动速度和扩大其移动空间,从而更好地适应复杂的工作环境。
05
找到一种更稳定和有效的相机模式对平面双关节机器人有哪些潜在好处?
首先,它可以提高机器人的移动速度和扩大其移动空间,从而更好地适应复杂的工作环境。
其次,它可以提高机器人获取环境信息的质量和效率,从而使机器人能够更准确地做出决策。最后,它可以为平面双关节机器人的应用奠定坚实的基础。
06
实验结论
详细分析了平面双关节机器人的摄像头姿态,并从摄像头位置调整和一般数据分析两个方面进行了讨论。同时,该文以五连杆平面摄像机器人为研究对象,讨论了人体姿势平衡、关节运动控制以及摄像机速率的估计和控制等问题。
通过有限摄像技术的使用,可以有效解决平面摄影的问题,并给出了摄影和运动的限制以及平面摄影的测量结果。
通过实验和数据分析,可以获取机器人和相机的相关参数,以便更好地进行控制和优化。

表1平面双关节机器人的摄像机参数
07
应用前景
双关节机器人在危险环境下的操作、救援、提高操作效率以及扩大人类活动范围等方面具有很大的发展潜力。
此外,该文还提到美国国防高级研究计划局(DARPA)正在开展DARPA挑战赛,旨在开发一种能够在紧急救援工作中取代人类的机器人,特别是在崎岖地形条件下,机器人的运动性能和操作能力将比人类更强。
因此,双关节机器人在未来的应用前景非常广阔,可以应用于各种需要人类干预的场景。

更多精彩内容请关注公众号:BFT机器人
本文为原创文章,版权归BFT机器人所有,如需转载请与我们联系。若您对该文章内容有任何疑问,请与我们联系,将及时回应。