毫米波雷达系统性能参数分析
- 1、距离
- 2、速度
- 3、角度
本文主要分析描述雷达系统的系统性能的一些参数,包括最大作用距离,距离分辨率,最大探测速度……等参数。通过理解这些参数的组成,能够帮助我们设计雷达系统参数。
1、距离
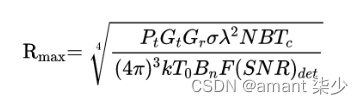
(1)最大工作距离
雷达的作用距离常通过雷达方程来计算,与发射功率Pt,天线增益Ga,目标RCS,接收机灵敏度(SNR)det等参数相关,具体计算公式如下:
另一种计算方法与最大中频带宽IFmax相关。

最大中频带宽的大小与采样率相关,在complex 1x模式下,IFmax≤0.9∗fs;在complex 2x和实采样模式下,IFmax≤0.9∗fs/2。因此,也可以用下式来估计最大作用距离:
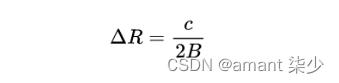
(2)距离分辨率
距离分辨率表示距离向分辨两个目标的能力。
(3)测距精度
测距精度表示测量单目标的距离测量精度,取决于信噪比。

2、速度
(1)最大探测速度
目标速度是通过提取chirp之间的相位差(多普勒频率)来计算。连续chirp之间的相位差的相位差可表示为: 
当相位测量不模糊时,即|Δϕ|<π,得到最大测量速度。
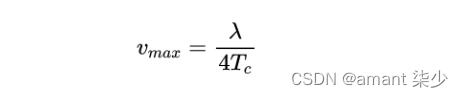
注意:Tc为chirp总周期(包括active chirp time + idle time)。
(2)速度分辨率
速度分辨率表示速度维区分两个同一位置的目标的能力。假设一帧传输 N 个chirp,速度维频率分辨率为2π/N。

注意:Tf=NTc为有效帧周期,不包括inter frame time。
(3)测速精度
测速精度表示测量单目标的速度测量精度,取决于信噪比。
3、角度
(1)探测视角范围 FOV
角度通过RX天线间的接收信号相位差(由波程差引起)来计算,相位差为
当相位差不模糊时,即|ω|<π,得到测角范围。

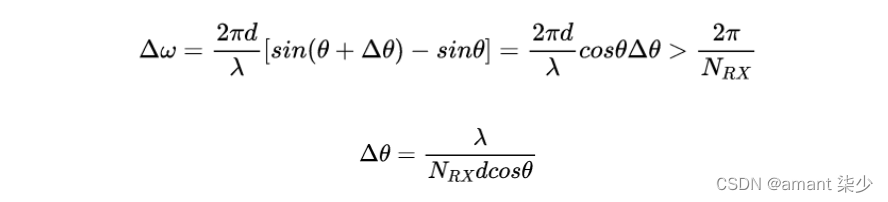
(2)角度分辨率
角度分辨率表示在角度维分离相同距离、速度目标的能力。雷达的角度分辨率一般较低,AWR1xxx系列雷达1TX4RX的角度分辨率28°左右。在实际情况下,由于距离、速度分辨率较高,目标一般可以在距离和速度维区分开。
假设接收天线个数为NRX,角度维频率分辨率为2π/NRX。
(3)测角精度