程序示例精选
VS+QT+VTK三维网格显示-点面选择-法线法向量显示-配准-分割窗体程序
如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!
前言
这篇博客针对<<VS+QT+VTK三维网格显示-点面选择-法线法向量显示-配准-分割窗体程序>>编写代码,代码整洁,规则,易读。 学习与应用推荐首选。
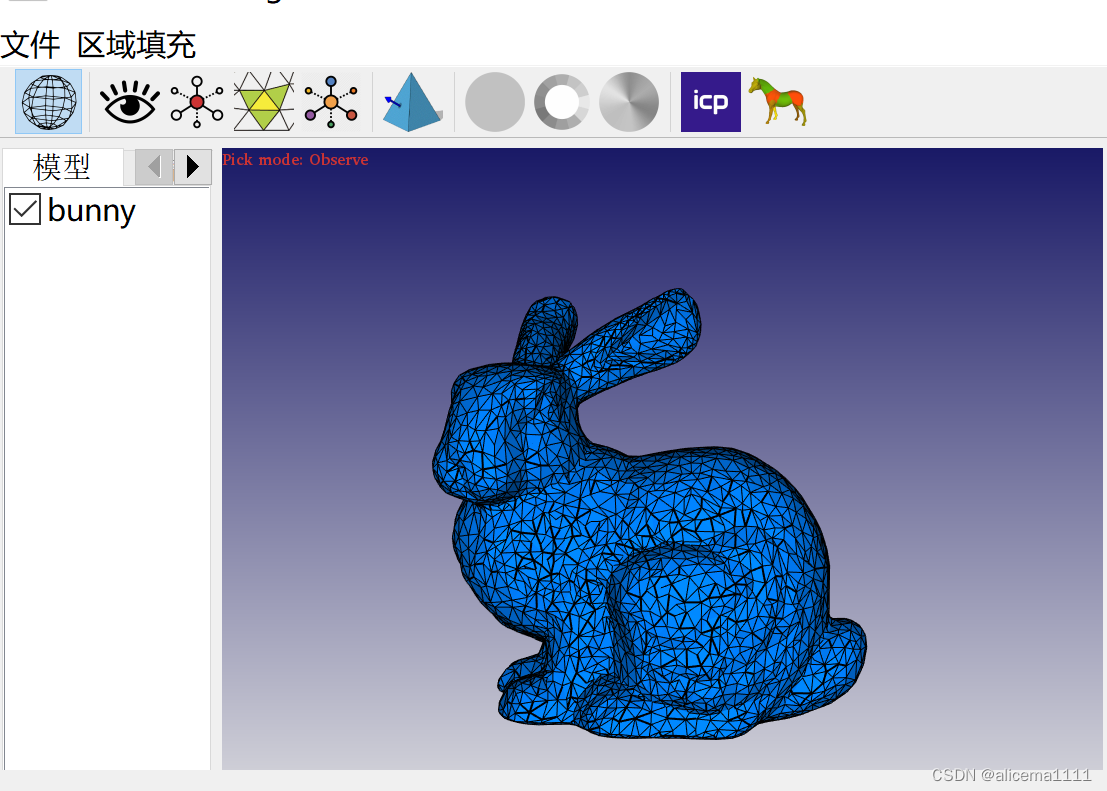
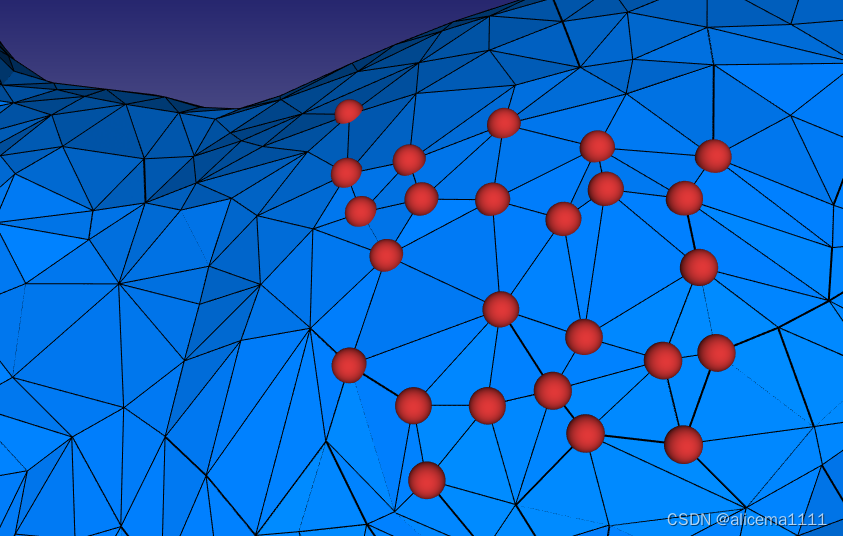
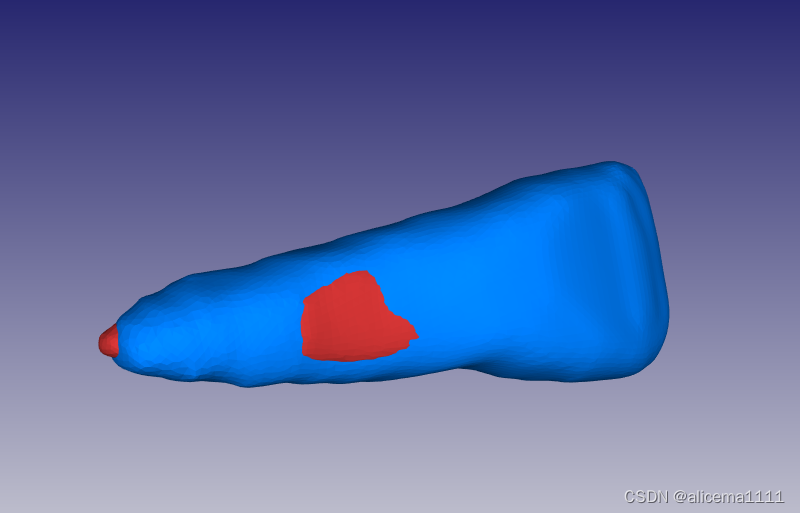
功能:读取三维网格数据,包括*.obj、*.stl、*.off,通过单击网格表面高亮显示单个顶点和多个顶点以及单个面和面法线,显示带/不带线框的网格数据,显示点数、面数和边数,ICP算法与半自动分割算法的实现。
文章目录
一、所需工具软件
二、使用步骤
1. 引入库
2. 代码实现
3. 运行结果
三、在线协助
一、所需工具软件
1. VS, Qt
2. VTK
二、使用步骤
1.引入库
#include <QtCore/QStringList>
#include <QtWidgets/QFileDialog>
#include <QtWidgets/QMessageBox>
#include <vtkAppendPolyData.h>
#include <vtkCellData.h>
#include <vtkExtractEdges.h>
#include <vtkIdTypeArray.h>
#include <vtkMath.h>
#include <vtkLineSource.h>
#include <vtkLookupTable.h>
#include <vtkMatrix4x4.h>
#include <vtkNew.h>
#include <vtkOBJReader.h>
#include <vtkPointData.h>
#include <vtkPoints.h>
#include <vtkPolyDataMapper.h>
#include <vtkProperty.h>
#include <vtkScalarBarActor.h>
#include <vtkSphereSource.h>
#include <vtkSTLReader.h>
#include <vtkTransform.h>
#include <vtkTransformPolyDataFilter.h>
#include <iomanip>
#include <sstream>
#include "icp_algorithm.h"
#include "mesh_operation.h"
#include "mesh_segmenter.h"
#include "vtkOFFReader.h"2. 代码实现
代码如下:
void MeshProcessing::OnWireframeMode() {
bool isChecked = this->wireframe_mode_action_->isChecked();
for (auto actor : this->mesh_processing_data_model_->wireframe_actor_vec_)
actor->SetVisibility(isChecked);
this->vtk_widget_->update();
}
void MeshProcessing::OnObserveMode() {
this->removeVertexActors();
this->removeFaceActors();
this->removeMultiVertexActors();
this->removeFillRegionFaceActors();
this->mesh_processing_data_model_->pick_mode_ = MeshProcessingDataModel::OBSERVE;
this->vtk_widget_->updateTopText();
}
void MeshProcessing::OnVertexMode() {
this->removeFaceActors();
this->removeMultiVertexActors();
this->removeFillRegionFaceActors();
this->mesh_processing_data_model_->pick_mode_ = MeshProcessingDataModel::VERTEX;
this->vtk_widget_->updateTopText();
}
void MeshProcessing::OnFaceMode() {
this->removeVertexActors();
this->removeMultiVertexActors();
this->removeFillRegionFaceActors();
this->mesh_processing_data_model_->pick_mode_ = MeshProcessingDataModel::FACE;
this->vtk_widget_->updateTopText();
}
void MeshProcessing::OnMultiVertexMode() {
this->removeVertexActors();
this->removeFaceActors();
this->removeFillRegionFaceActors();
this->mesh_processing_data_model_->pick_mode_ = MeshProcessingDataModel::MULTI_VERTEX;
this->vtk_widget_->updateTopText();
}
void MeshProcessing::OnDisplayNormal() {
if (this->mesh_processing_data_model_->pick_mode_ != MeshProcessingDataModel::FACE ||
this->mesh_processing_data_model_->selected_face_id_ == -1) {
QMessageBox::warning(this, QString::fromLocal8Bit("警告"), QString::fromLocal8Bit("请在面拾取模式中选取一个面片!"));
return;
}
int cellId = this->mesh_processing_data_model_->selected_face_id_;
vtkCell * cell = this->mesh_processing_data_model_->combined_mesh_->GetCell(cellId);
double p0[3], p1[3], p2[3];
this->mesh_processing_data_model_->combined_mesh_->GetPoint(cell->GetPointId(0), p0);
this->mesh_processing_data_model_->combined_mesh_->GetPoint(cell->GetPointId(1), p1);
this->mesh_processing_data_model_->combined_mesh_->GetPoint(cell->GetPointId(2), p2);
double c[3];
for (int i = 0; i < 3; ++i) c[i] = (p0[i] + p1[i] + p2[i]) / 3;
double p0p1[3], p0p2[3];
vtkMath::Subtract(p1, p0, p0p1);
vtkMath::Subtract(p2, p0, p0p2);
double normal[3];
vtkMath::Cross(p0p1, p0p2, normal);
vtkMath::Normalize(normal);
double constant = (
std::sqrt(vtkMath::Distance2BetweenPoints(p0, p1)) +
std::sqrt(vtkMath::Distance2BetweenPoints(p1, p2)) +
std::sqrt(vtkMath::Distance2BetweenPoints(p2, p0))
);
double e[3];
for (int i = 0; i < 3; ++i) e[i] = c[i] + constant * normal[i];
vtkSmartPointer<vtkLineSource> lineSource =
vtkSmartPointer<vtkLineSource>::New();
lineSource->SetPoint1(c);
lineSource->SetPoint2(e);
lineSource->Update();
this->mesh_processing_data_model_->selected_face_normal_actor_ = this->vtk_widget_->addActor(lineSource->GetOutput());
this->mesh_processing_data_model_->selected_face_normal_actor_->GetProperty()->SetColor(.8, .8, .2);
this->mesh_processing_data_model_->selected_face_normal_actor_->GetProperty()->SetLineWidth(5);
this->vtk_widget_->update();
}
void MeshProcessing::OnDefaultMode() {
this->mesh_processing_data_model_->display_mode_ = MeshProcessingDataModel::DEFAULT;
if (this->mesh_processing_data_model_->highlight_vec_[0] == 1)
this->vtk_widget_->highlightMesh(this->mesh_processing_data_model_->actor_vec_[0]);
else
this->vtk_widget_->unhighlightMesh(this->mesh_processing_data_model_->actor_vec_[0]);
this->vtk_widget_->update();
}
void MeshProcessing::OnDiscreteMode() {
if (this->mesh_processing_data_model_->actor_vec_.size() != 1) {
QMessageBox::critical(this, QString::fromLocal8Bit("错误"), QString::fromLocal8Bit("请检查目前读入的网格数是否为1!"));
return;
}
this->mesh_processing_data_model_->display_mode_ = MeshProcessingDataModel::DISCRETE;
this->mesh_processing_data_model_->mesh_vec_[0] = this->color_table_handler_->turnToDiscrete();
this->mesh_processing_data_model_->hueLut = vtkSmartPointer<vtkLookupTable>::New();
this->mesh_processing_data_model_->hueLut->SetNumberOfTableValues(this->color_table_handler_->maxScalar() - this->color_table_handler_->minScalar() + 1);
this->mesh_processing_data_model_->hueLut->Build();
for (int i = 0; i < this->color_table_handler_->maxScalar() - this->color_table_handler_->minScalar() + 1; ++i) {
double hue = i * 1.0 / (this->color_table_handler_->maxScalar() - this->color_table_handler_->minScalar() + 1);
double r, g, b;
vtkMath::HSVToRGB(hue, 1.0, 1.0, &r, &g, &b);
this->mesh_processing_data_model_->hueLut->SetTableValue(i, r, g, b, 1);
}
this->mesh_processing_data_model_->actor_vec_[0]->GetMapper()->SetScalarRange(0, this->color_table_handler_->maxScalar() - this->color_table_handler_->minScalar() + 1);
this->mesh_processing_data_model_->actor_vec_[0]->GetMapper()->SetScalarModeToUseCellData();
this->mesh_processing_data_model_->actor_vec_[0]->GetMapper()->SetColorModeToMapScalars();
this->mesh_processing_data_model_->actor_vec_[0]->GetMapper()->SetLookupTable(this->mesh_processing_data_model_->hueLut);
if (this->mesh_processing_data_model_->highlight_vec_[0] == 1)
this->vtk_widget_->highlightMesh(this->mesh_processing_data_model_->actor_vec_[0]);
else
this->vtk_widget_->unhighlightMesh(this->mesh_processing_data_model_->actor_vec_[0]);
this->vtk_widget_->update();
}
void MeshProcessing::OnContinuousMode() {
if (this->mesh_processing_data_model_->actor_vec_.size() != 1) {
QMessageBox::critical(this, QString::fromLocal8Bit("错误"), QString::fromLocal8Bit("请检查目前读入的网格数是否为1!"));
return;
}
this->mesh_processing_data_model_->display_mode_ = MeshProcessingDataModel::CONTINUOUS;
this->mesh_processing_data_model_->mesh_vec_[0] = this->color_table_handler_->turnToContinuous();
this->mesh_processing_data_model_->hueLut = vtkSmartPointer<vtkLookupTable>::New();
this->mesh_processing_data_model_->hueLut->SetTableRange(this->color_table_handler_->minScalar(), this->color_table_handler_->maxScalar() + 1);
this->mesh_processing_data_model_->hueLut->SetHueRange(0, 1);
this->mesh_processing_data_model_->hueLut->SetSaturationRange(1, 1);
this->mesh_processing_data_model_->hueLut->SetValueRange(1, 1);
this->mesh_processing_data_model_->hueLut->Build();
this->mesh_processing_data_model_->actor_vec_[0]->GetMapper()->SetScalarRange(this->color_table_handler_->minScalar(), this->color_table_handler_->maxScalar() + 1);
this->mesh_processing_data_model_->actor_vec_[0]->GetMapper()->SetScalarModeToUseCellData();
this->mesh_processing_data_model_->actor_vec_[0]->GetMapper()->SetColorModeToMapScalars();
this->mesh_processing_data_model_->actor_vec_[0]->GetMapper()->SetLookupTable(this->mesh_processing_data_model_->hueLut);
if (this->mesh_processing_data_model_->highlight_vec_[0] == 1)
this->vtk_widget_->highlightMesh(this->mesh_processing_data_model_->actor_vec_[0]);
else
this->vtk_widget_->unhighlightMesh(this->mesh_processing_data_model_->actor_vec_[0]);
this->vtk_widget_->update();
}
void MeshProcessing::OnICPRegistration() {
std::vector<int> active_ids;
for (int i = 0; i < this->mesh_processing_data_model_->highlight_vec_.size(); ++i) {
if (this->mesh_processing_data_model_->highlight_vec_[i])
active_ids.push_back(i);
}
if (active_ids.size() != 2) {
QMessageBox::warning(this, QString::fromLocal8Bit("警告"), QString::fromLocal8Bit("请检查目前选中的网格数是否为2!"));
return;
}
this->wireframe_mode_action_->setChecked(false);
OnWireframeMode();
this->disableAllActions();
this->OnObserveMode();
this->register_scroll_area_->setVisible(true);
this->mesh_processing_data_model_->source_id = active_ids.front();
this->mesh_processing_data_model_->target_id = active_ids.back();
this->mesh_processing_data_model_->actor_vec_[this->mesh_processing_data_model_->target_id]->GetProperty()->SetColor(.8, .2, .2);
this->vtk_widget_->update();
this->tab_widget_->setTabEnabled(0, false);
this->tab_widget_->setTabEnabled(1, true);
this->tab_widget_->setCurrentIndex(1);
}
void MeshProcessing::OnSegment() {
if (this->mesh_processing_data_model_->mesh_vec_.size() != 1) {
QMessageBox::critical(this, QString::fromLocal8Bit("错误"), QString::fromLocal8Bit("请检查目前读入的网格数是否为1!"));
return;
}
this->wireframe_mode_action_->setChecked(false);
OnWireframeMode();
this->disableAllActions();
this->OnObserveMode();
if (this->color_table_handler_ != nullptr) {
this->default_mode_action_->setEnabled(false);
this->discrete_mode_action_->setEnabled(false);
this->continuous_mode_action_->setEnabled(false);
this->OnDefaultMode();
}
this->segment_scroll_area_->setVisible(true);
this->cluster_num_slider_->setEnabled(false);
this->mesh_processing_data_model_->segment_id = 0;
this->tab_widget_->setTabEnabled(0, false);
this->tab_widget_->setTabEnabled(1, true);
this->tab_widget_->setCurrentIndex(1);
}
void MeshProcessing::OnFillRegionThreeVertices() {
this->removeFillRegionFaceActors();
for (int i = 0; i < this->mesh_processing_data_model_->combined_mesh_->GetNumberOfCells(); ++i) {
vtkSmartPointer<vtkIdList> ptIds =
vtkSmartPointer<vtkIdList>::New();
this->mesh_processing_data_model_->combined_mesh_->GetCellPoints(i, ptIds);
int validNum = 0;
for (int k = 0; k < 3; ++k)
validNum += this->mesh_processing_data_model_->selected_multi_vertex_set_.find(ptIds->GetId(k)) != this->mesh_processing_data_model_->selected_multi_vertex_set_.end() ? 1 : 0;
if (validNum == 3) {
this->mesh_processing_data_model_->fill_region_face_actor_vec_.push_back(this->vtk_widget_->highlightFace(this->mesh_processing_data_model_->combined_mesh_, i));
this->mesh_processing_data_model_->fill_region_face_actor_vec_.back()->GetProperty()->SetColor(.8, .8, .2);
}
}
this->vtk_widget_->update();
}
void MeshProcessing::OnFillRegionTwoVertices() {
this->removeFillRegionFaceActors();
for (int i = 0; i < this->mesh_processing_data_model_->combined_mesh_->GetNumberOfCells(); ++i) {
vtkSmartPointer<vtkIdList> ptIds =
vtkSmartPointer<vtkIdList>::New();
this->mesh_processing_data_model_->combined_mesh_->GetCellPoints(i, ptIds);
int validNum = 0;
for (int k = 0; k < 3; ++k)
validNum += this->mesh_processing_data_model_->selected_multi_vertex_set_.find(ptIds->GetId(k)) != this->mesh_processing_data_model_->selected_multi_vertex_set_.end() ? 1 : 0;
if (validNum >= 2) {
this->mesh_processing_data_model_->fill_region_face_actor_vec_.push_back(this->vtk_widget_->highlightFace(this->mesh_processing_data_model_->combined_mesh_, i));
this->mesh_processing_data_model_->fill_region_face_actor_vec_.back()->GetProperty()->SetColor(.8, .8, .2);
}
}
this->vtk_widget_->update();
}
void MeshProcessing::OnListWidgetModelItemChanged(QListWidgetItem * item) {
int row_id = this->list_widget_model_->row(item);
if (item->checkState() == Qt::Unchecked) {
this->vtk_widget_->unhighlightMesh(this->mesh_processing_data_model_->actor_vec_[row_id]);
this->mesh_processing_data_model_->highlight_vec_[row_id] = 0;
} else {
this->vtk_widget_->highlightMesh(this->mesh_processing_data_model_->actor_vec_[row_id]);
this->mesh_processing_data_model_->highlight_vec_[row_id] = 1;
}
this->resetParameters();
this->vtk_widget_->update();
}
void MeshProcessing::OnRunICP() {
ICPAlgorithm icp;
icp.setSource(this->mesh_processing_data_model_->mesh_vec_[this->mesh_processing_data_model_->source_id]);
icp.setTarget(this->mesh_processing_data_model_->mesh_vec_[this->mesh_processing_data_model_->target_id]);
if (this->move_center_radio_button_->isChecked())
icp.moveCenterOn();
else
icp.moveCenterOff();
icp.setMaxIter(this->max_iter_spin_box_->value());
icp.setMinError(this->min_error_double_spin_box_->value());
icp.registration();
vtkMatrix4x4 * transform_matrix = icp.getTransformMatrix();
std::ostringstream oss;
oss << setprecision(2);
for (int i = 0; i < 4; ++i) {
for (int j = 0; j < 4; ++j) oss << transform_matrix->GetElement(i, j) << "\t";
oss << std::endl;
}
this->iter_num_label_->setText(QString::number(icp.getIterNum()));
this->error_label_->setText(QString::number(icp.getError()));
this->matrix_label_->setText(QString::fromStdString(oss.str()));
vtkSmartPointer<vtkTransform> transform =
vtkSmartPointer<vtkTransform>::New();
transform->SetMatrix(transform_matrix);
transform->Update();
vtkNew<vtkTransformPolyDataFilter> transformFilter;
transformFilter->SetInputData(this->mesh_processing_data_model_->mesh_vec_[0]);
transformFilter->SetTransform(transform);
transformFilter->Update();
vtkPolyDataMapper * mapper = vtkPolyDataMapper::SafeDownCast(this->mesh_processing_data_model_->actor_vec_[0]->GetMapper());
mapper->SetInputData(transformFilter->GetOutput());
this->vtk_widget_->resetCamera();
this->vtk_widget_->update();
}
void MeshProcessing::OnExitICP() {
this->tab_widget_->setTabEnabled(0, true);
this->tab_widget_->setTabEnabled(1, false);
this->tab_widget_->setCurrentIndex(0);
this->iter_num_label_->setText("");
this->error_label_->setText("");
this->matrix_label_->setText("");
this->enableAllActions();
this->mesh_processing_data_model_->mesh_vec_[0]->DeepCopy(this->mesh_processing_data_model_->actor_vec_[0]->GetMapper()->GetInput());
this->mesh_processing_data_model_->actor_vec_[this->mesh_processing_data_model_->target_id]->GetProperty()->SetColor(.0, .5, 1.);
this->vtk_widget_->update();
this->register_scroll_area_->setVisible(false);
this->resetParameters();
}
void MeshProcessing::OnCancelICP() {
this->tab_widget_->setTabEnabled(0, true);
this->tab_widget_->setTabEnabled(1, false);
this->tab_widget_->setCurrentIndex(0);
this->iter_num_label_->setText("");
this->error_label_->setText("");
this->matrix_label_->setText("");
this->enableAllActions();
vtkPolyDataMapper * mapper = vtkPolyDataMapper::SafeDownCast(this->mesh_processing_data_model_->actor_vec_[0]->GetMapper());
mapper->SetInputData(this->mesh_processing_data_model_->mesh_vec_[0]);
this->mesh_processing_data_model_->actor_vec_[this->mesh_processing_data_model_->target_id]->GetProperty()->SetColor(.0, .5, 1.);
this->vtk_widget_->update();
this->register_scroll_area_->setVisible(false);
this->resetParameters();
}
void MeshProcessing::OnClusterNumChanged(int n) {
using std::vector;
this->color_table_handler_ = new ColorTableHandler;
this->color_table_handler_->setMesh(this->mesh_processing_data_model_->mesh_vec_[this->mesh_processing_data_model_->segment_id]);
vector<double> color_value_vec;
vtkSmartPointer<vtkDoubleArray> scalars = this->mesh_processing_data_model_->mesh_segmenter_->getSegmentScalar(n);
this->mesh_processing_data_model_->mesh_vec_[this->mesh_processing_data_model_->segment_id]->GetCellData()->SetScalars(scalars);
for (int i = 0; i < scalars->GetNumberOfValues(); ++i)
color_value_vec.push_back(scalars->GetValue(i));
this->color_table_handler_->readColorValueVec(color_value_vec);
this->OnDiscreteMode();
}
void MeshProcessing::OnRunSegment() {
this->mesh_processing_data_model_->mesh_segmenter_ = new MeshSegmenter(this->seed_num_spin_box_->value(), this->phy_ratio_double_spin_box_->value());
this->mesh_processing_data_model_->mesh_segmenter_->vtk_widget_ = this->vtk_widget_;
this->mesh_processing_data_model_->mesh_segmenter_->setMesh(this->mesh_processing_data_model_->mesh_vec_[this->mesh_processing_data_model_->segment_id]);
this->mesh_processing_data_model_->mesh_segmenter_->segment();
this->cluster_num_slider_->setEnabled(true);
this->cluster_num_slider_->setValue(2);
this->OnClusterNumChanged(2);
this->cluster_num_slider_->setMinimum(2);
this->cluster_num_slider_->setMaximum(this->seed_num_spin_box_->value());
}
void MeshProcessing::OnExitSegment() {
using std::vector;
this->tab_widget_->setTabEnabled(0, true);
this->tab_widget_->setTabEnabled(1, false);
this->tab_widget_->setCurrentIndex(0);
this->iter_num_label_->setText("");
this->error_label_->setText("");
this->matrix_label_->setText("");
this->enableAllActions();
this->default_mode_action_->setEnabled(true);
this->discrete_mode_action_->setEnabled(true);
this->continuous_mode_action_->setEnabled(true);
this->segment_scroll_area_->setVisible(false);
this->resetParameters();
}
void MeshProcessing::OnCancelSegment() {
this->tab_widget_->setTabEnabled(0, true);
this->tab_widget_->setTabEnabled(1, false);
this->tab_widget_->setCurrentIndex(0);
this->iter_num_label_->setText("");
this->error_label_->setText("");
this->matrix_label_->setText("");
this->enableAllActions();
this->default_mode_action_->setEnabled(false);
this->discrete_mode_action_->setEnabled(false);
this->continuous_mode_action_->setEnabled(false);
this->mesh_processing_data_model_->combined_mesh_->GetCellData()->SetScalars(nullptr);
this->mesh_processing_data_model_->actor_vec_[this->mesh_processing_data_model_->segment_id]->GetProperty()->SetColor(.0, .5, 1.);
this->mesh_processing_data_model_->actor_vec_[this->mesh_processing_data_model_->segment_id]->GetMapper()->ScalarVisibilityOff();
this->vtk_widget_->update();
this->segment_scroll_area_->setVisible(false);
this->resetParameters();
}
void MeshProcessing::OnSelectVertex(vtkIdType id) {
if (id == -1) return;
this->removeVertexActors();
this->mesh_processing_data_model_->selected_vertex_actor_ = this->vtk_widget_->highlightVertex(this->mesh_processing_data_model_->combined_mesh_, id);
this->mesh_processing_data_model_->selected_vertex_actor_->GetProperty()->SetInterpolationToGouraud();
this->mesh_processing_data_model_->selected_vertex_actor_->GetProperty()->SetColor(.8, .2, .2);
auto neighborVertexIds = MeshOperation::getConnectedVertices(this->mesh_processing_data_model_->combined_mesh_, id);
for (const auto & neighbor : neighborVertexIds) {
this->mesh_processing_data_model_->neighbor_vertex_actor_vec_.push_back(this->vtk_widget_->highlightVertex(this->mesh_processing_data_model_->combined_mesh_, neighbor));
this->mesh_processing_data_model_->neighbor_vertex_actor_vec_.back()->GetProperty()->SetInterpolationToGouraud();
this->mesh_processing_data_model_->neighbor_vertex_actor_vec_.back()->GetProperty()->SetColor(.8, .8, .2);
}
auto neighborFaceIds = MeshOperation::getVertexConnectedFaces(this->mesh_processing_data_model_->combined_mesh_, id);
for (const auto & neighbor : neighborFaceIds) {
this->mesh_processing_data_model_->neighbor_face_actor_vec_.push_back(this->vtk_widget_->highlightFace(this->mesh_processing_data_model_->combined_mesh_, neighbor));
this->mesh_processing_data_model_->neighbor_face_actor_vec_.back()->GetProperty()->SetColor(.8, .5, .2);
}
this->vtk_widget_->update();
}
void MeshProcessing::OnSelectFace(vtkIdType id) {
if (id == -1) return;
this->removeFaceActors();
this->mesh_processing_data_model_->selected_face_actor_ = this->vtk_widget_->highlightFace(this->mesh_processing_data_model_->combined_mesh_, id);
this->mesh_processing_data_model_->selected_face_actor_->GetProperty()->SetColor(.8, .2, .2);
auto neighborFaceIds = MeshOperation::getFaceConnectedFaces(this->mesh_processing_data_model_->combined_mesh_, id);
for (const auto & neighbor : neighborFaceIds) {
this->mesh_processing_data_model_->neighbor_face2_actor_vec_.push_back(this->vtk_widget_->highlightFace(this->mesh_processing_data_model_->combined_mesh_, neighbor));
this->mesh_processing_data_model_->neighbor_face2_actor_vec_.back()->GetProperty()->SetColor(.8, .8, .2);
}
this->mesh_processing_data_model_->selected_face_id_ = id;
this->vtk_widget_->update();
}
void MeshProcessing::OnSelectMultiVertex(const std::vector<vtkIdType>& ids) {
this->removeMultiVertexActors();
this->mesh_processing_data_model_->selected_multi_vertex_set_.clear();
for (const auto & id : ids) {
this->mesh_processing_data_model_->selected_multi_vertex_actor_vec_.push_back(this->vtk_widget_->highlightVertex(this->mesh_processing_data_model_->combined_mesh_, id));
this->mesh_processing_data_model_->selected_multi_vertex_actor_vec_.back()->GetProperty()->SetInterpolationToGouraud();
this->mesh_processing_data_model_->selected_multi_vertex_actor_vec_.back()->GetProperty()->SetColor(.8, .2, .2);
this->mesh_processing_data_model_->selected_multi_vertex_set_.insert(id);
}
this->vtk_widget_->update();
}
void MeshProcessing::resetParameters() {
vtkSmartPointer<vtkAppendPolyData> appendFilter =
vtkSmartPointer<vtkAppendPolyData>::New();
int cnt = 0;
int num_edges = 0;
for (int i = 0; i < this->mesh_processing_data_model_->highlight_vec_.size(); ++i) {
if (this->mesh_processing_data_model_->highlight_vec_[i]) {
appendFilter->AddInputData(this->mesh_processing_data_model_->mesh_vec_[i]);
num_edges += this->mesh_processing_data_model_->mesh_edge_vec_[i]->GetNumberOfLines();
++cnt;
}
}
if (cnt > 0) {
appendFilter->Update();
this->mesh_processing_data_model_->combined_mesh_ =
vtkSmartPointer<vtkPolyData>::New();
this->mesh_processing_data_model_->combined_mesh_->DeepCopy(appendFilter->GetOutput());
vtkSmartPointer<vtkIdTypeArray> numberScalarArray =
vtkSmartPointer<vtkIdTypeArray>::New();
numberScalarArray->SetNumberOfComponents(1);
numberScalarArray->SetName("number");
numberScalarArray->SetNumberOfValues(this->mesh_processing_data_model_->combined_mesh_->GetNumberOfPoints());
for (int i = 0; i < this->mesh_processing_data_model_->combined_mesh_->GetNumberOfPoints(); ++i)
numberScalarArray->SetValue(i, i);
this->mesh_processing_data_model_->combined_mesh_->GetPointData()->AddArray(numberScalarArray);
int edge_count = 0;
this->mesh_processing_data_model_->mean_edge_length = 0.0;
for (int i = 0; i < this->mesh_processing_data_model_->highlight_vec_.size(); ++i) {
if (this->mesh_processing_data_model_->highlight_vec_[i]) {
this->mesh_processing_data_model_->mean_edge_length +=
this->mesh_processing_data_model_->mesh_edge_vec_[i]->GetNumberOfLines() * this->mesh_processing_data_model_->mean_edge_length_vec_[i];
edge_count += this->mesh_processing_data_model_->mesh_edge_vec_[i]->GetNumberOfLines();
}
}
this->mesh_processing_data_model_->mean_edge_length /= edge_count;
this->vtk_widget_->updateBottomText(
this->mesh_processing_data_model_->combined_mesh_->GetNumberOfPoints(),
this->mesh_processing_data_model_->combined_mesh_->GetNumberOfCells(),
num_edges
);
} else {
this->mesh_processing_data_model_->combined_mesh_ = nullptr;
this->mesh_processing_data_model_->mean_edge_length = 0.0;
this->vtk_widget_->updateBottomText(
0, 0, 0
);
}
}
3. 运行结果
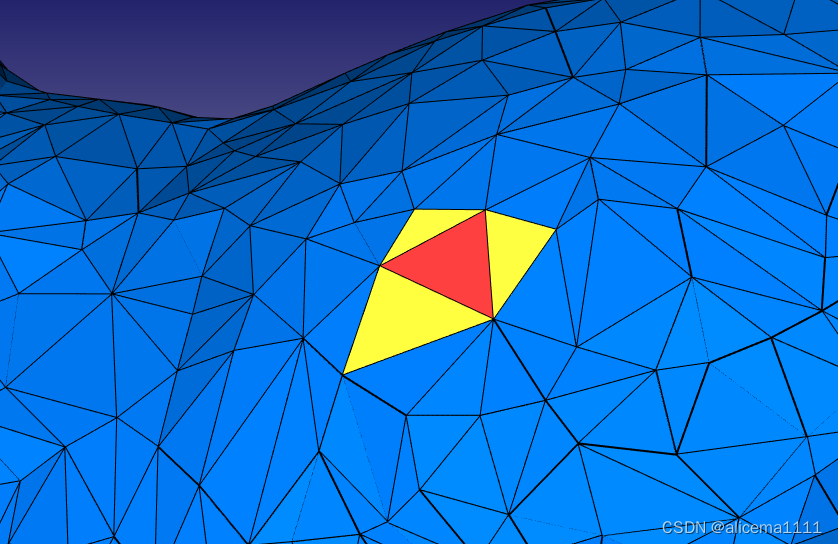
面选择
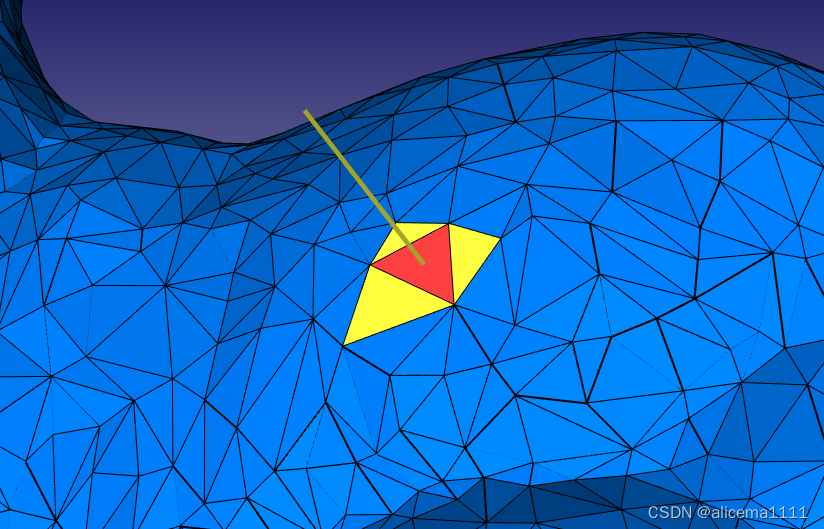
法线显示
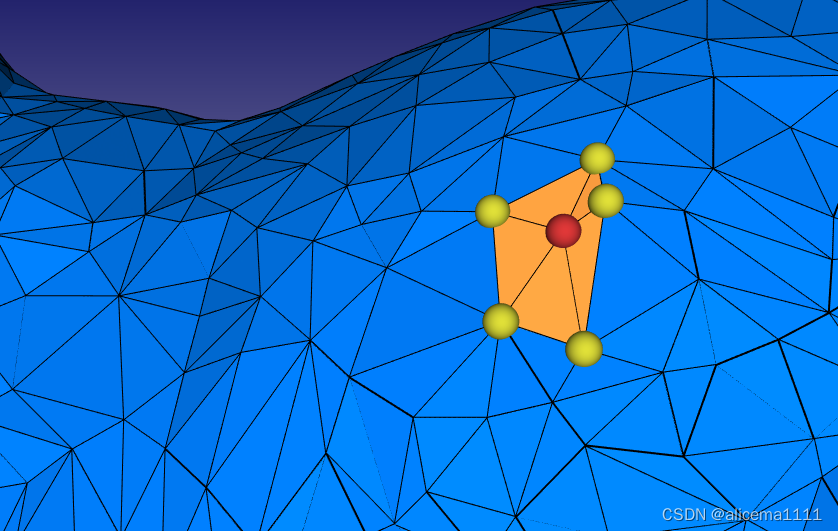
多点选择
配准
三、在线协助:
如需安装运行环境或远程调试,见文章底部个人 QQ 名片,由专业技术人员远程协助!
1)远程安装运行环境,代码调试
2)Qt, C++, Python入门指导
3)界面美化
4)软件制作
当前文章连接:Python+Qt桌面端与网页端人工客服沟通工具_alicema1111的博客-CSDN博客
博主推荐文章:python人脸识别统计人数qt窗体-CSDN博客
博主推荐文章:Python Yolov5火焰烟雾识别源码分享-CSDN博客
Python OpenCV识别行人入口进出人数统计_python识别人数-CSDN博客
个人博客主页:alicema1111的博客_CSDN博客-Python,C++,网页领域博主
博主所有文章点这里:alicema1111的博客_CSDN博客-Python,C++,网页领域博主



![[BPU部署教程] 万字长文!通透解读模型部署端到端大流程——以终为始,以行为知](https://img-blog.csdnimg.cn/88981d2ca8354d5c9430b1f2d7dfdcf0.png)