文章目录
-
- 概要
- 整体架构流程
- 技术名词解释
- 技术细节
- 小结
概要
提示:这里可以添加技术概要
模数转换器(Analog to Digital Convertor,ADC)将模拟量转变成数字量,是电学测量、控制领域—个极为重要的部件。
一个模拟电压信号,在进入ADC 的输入端之前,一般都需要增加一级驱动电路(Driver]。但是,也有一些ADC,它具有“设计极为贴心”的输入端,就无需在前级增加驱动电路了。因此︰给ADC输入端增加驱动电路是必须的,除非你确保驱动电路是不必要的。
整体架构流程
提示:这里可以添加技术整体架构
例如:
在语言模型中,编码器和解码器都是由一个个的 Transformer 组件拼接在一起形成的。
技术名词解释
提示:这里可以添加技术名词解释
例如:
- Bert
- GPT 初代
- GPT-2
- GPT-3
- ChatGPT
技术细节
提示:这里可以添加技术细节
例如:
1.为什么?
为什么要加这个ADC驱动电路,一般总结来说有5点:
1.输入范围调整
任何一个ADC,都有输入电压范围。当实际输入电压超出此范围,将引起ADC转换失效。而被转换的信号,并不能保证在此范围内,这就需要 ADC驱动电路将其调整到合适的范围之内。
输入范围调整,包括对信号的增益改变,以及直流电平移位两个功能。数学表示为︰
y = kx + b
其中×为原始输入信号(就是没有增加驱动电路之前的)——它的变化范围一定不是ADC期望的,或者超出了范围,或者太小,让ADC使不出全部力量。y为驱动电路产生的信号。而k和b,则是驱动电路实现的功能,对原始信号实施k倍放大,然后移位b。
例如,原始输入信号骑在OV上,幅度为0.1V,而 ADC的输入电压范围是0~5V。则原始输入信号最大值为0.1V,最小值为-0.1V,需要驱动电路实施如下功能︰放大5V/(200mV-25倍,移位2.5V,即:
y = 25x +2.5
此时,驱动电路输出的最大值为5V,最小值为0V,信号既不超限,又能最大限度发挥ADC的能力。当然,为了更加保险,一般会留有一些裕量,可以将25倍改为20倍,则最大值变为4.5V,最小值为0.5V,ADC会感觉舒服,并且足够安全。
在双电源供电情况下,前级信号输出一般都会骑在0V之上,这导致×信号有正有负。而绝大多数ADC不能接受负输入信号——如果可以,一般价格都比较高。此时,驱动电路就充满了存在价值。
2.输入类型转换
原始输入信号的输出类型有两种︰单端型、差分型,而 ADC 的输入类型有三种︰单端型、全差分型和伪差分型。如果两者不一致,会影响ADC性能发挥。这就需要类型转换电路,将类型和ADC输入保持一致。
例如一个电压信号,如果用两根线传输,且两线电位做相反变化,则此信号为差分信号。一个电压信号,如果用一根线传输,且默认地线为参考点,则此信号为单端信号。
ADC的输入端类型则稍复杂一些:
1)单端型∶它只有一个输入端Aw,实际输入信号为此输入端电压uIN。
2)全差分型︰它有两个完全对称的输入端Awr、AN.,对应的电压为uNr、uIN-,则实际输入电压为,unv.减去uN-。
3)伪差分型∶它有两个不对称的输入端An.、An.,对应的电压为un、uwn.,则实际输入电压为,uw.减去un。关键是,Aw:端,允许输入信号满幅度变化,而Aw.端,像受欺负一样,只被允许小幅度变化。
本节重点阐述单端型和全差分型ADC,暂不涉及伪差分型ADC。
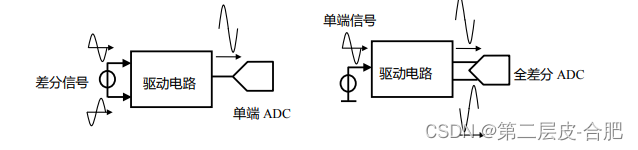
是常见的两种输入类型转换。左边将差分信号转换成单端信号,适应于单端型ADC,右边电路将单端信号转换成差分信号,适应于后面的全差分ADC。
有两点注意︰第一,左边电路可以用另外一种方法实现,即将差分信号的一个端子直接接入单端ADC。第二,两个电路中,可以发现,输入都是骑在0V上的信号,而输出都变成了大于V0的信号(骑在某个正电压上),以适应于多数只能接受正电压输入的ADC。
小结
提本示:这里可以添加总结:
本文主要分享了ADC前级驱动电路,以及增加前级驱动的两个原因,后面将继续分享增加ADC驱动电路的原因