目录
💥1 概述
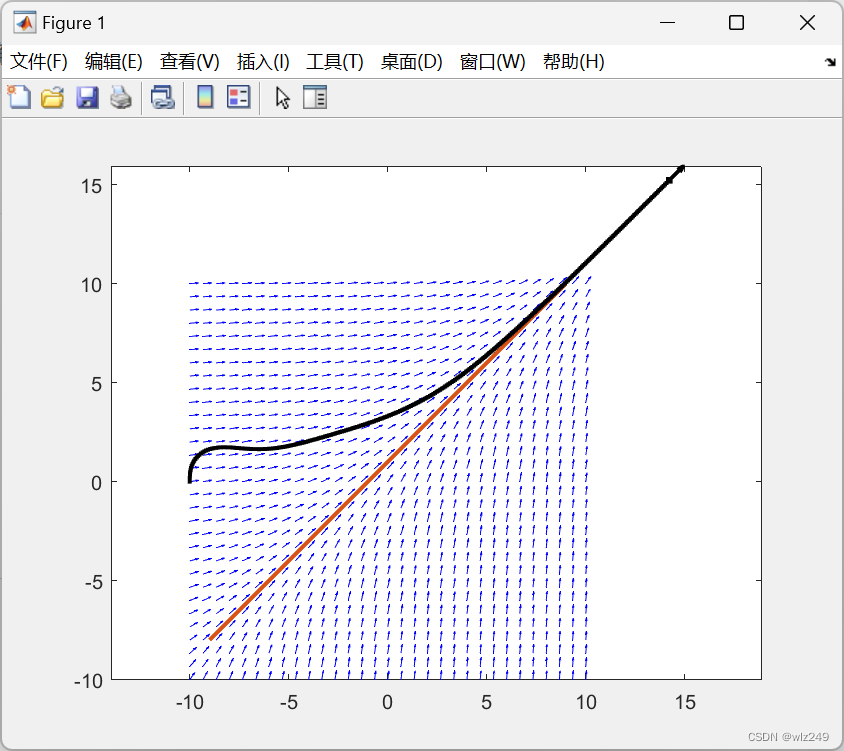
📚2 运行结果
🎉3 参考文献
👨💻4 Matlab代码
💥1 概述
以下技术任务是在固定翼小型无人机上执行的。
- 刚体动力系统模型及其数值模拟。
- 模拟具有测量误差的车载传感器。
- 根据传感器数据进行状态估计。
- 稳定和跟踪控制。
- 测试和可视化。
此存储库包含用于飞行建模和模拟的代码。
📚2 运行结果
🎉3 参考文献
[1]高翔,张烁,何仁,张贝贝.可倾转四旋翼飞行器动力学建模与反步控制[J].工业控制计算机,2022,35(09):72-75+77.
👨💻4 Matlab代码
主函数部分代码:
clc; clear; close all;
% Parameters that could be changed
u = 10;
v = 0;
w = 0;
Wx = 1;
Wy = 0;
Wz = 0;
p = 2;
q = 0;
r = 0;
theta = 1.24;
phi = 0.45;
si = 0.24;
Wind = 2; % To determine air speed
Vg = 30;
%% Rigid Body Model
[uvw pqr uvwdot phithetasi] = SystemModel(u,v,w,Wx,Wy,Wz,p,q,r,theta,phi,si);
%% Sensor Model
[accel gyro Pressure GPS] = Sensors(uvw, pqr, uvwdot, phithetasi, Vg, Wind);
%% Estimation(kalman)
EstaccelX = Estimation(accel(:,1));
EstaccelY = Estimation(accel(:,2));
EstaccelZ = Estimation(accel(:,3));
EstPn = Estimation(GPS(:,1));
EstPe = Estimation(GPS(:,2));
%% Follow Trajectory
Dubin;




![[基因遗传算法]原理思想和python代码的结合理解之(一) :单变量](https://img-blog.csdnimg.cn/aed566ccc5fa4cbd82e8bb0800288d30.png)


![分布式文件存储系统FastDFS[2]-上传和下载文件工具类](https://img-blog.csdnimg.cn/00771231adde482c92c58e6c0478cb35.png)

