文章目录
- 项目背景
- 一、理论基础
- 1.前言
- 2.设计理念
- 2.1 多尺寸卷积核
- 2.2 点卷积
- 2.3 卷积核替换
- 2.4 Bottleneck
- 2.5 深度可分离卷积(Depthwise Separable Conv)
- 3.网络结构
- 4.评估分析
- 二、数据预处理
- 三、数据读取
- 四、导入模型
- 五、模型训练
- 六、结果可视化
- 七、个体预测结果展示
- 总结
项目背景
今天详解以下Xception算法,同时应用它做一个鸟类识别。由于Xception模型在极大的减少了网络参数量和计算复杂度的同时,可以保持卓越的性能表现。因此,Xception模型已经被广泛地应用与图像分类、目标检测等任务中。
本次实战案例就是一个典型的图像分类。
本次项目实战鸟类数据集主要分为4类,分别为bananaquit(蕉林莺)、Black Skimmer (黑燕鸥类)、Black Throated Bushtiti (黑喉树莺)、Cockatoo (凤头鹦鹉或葵花鹦鹉),总计565张。

本项目基于百度AI Studio平台实现,原项目地址为:https://aistudio.baidu.com/aistudio/projectdetail/6375104
一、理论基础
1.前言
在计算机视觉领域,卷积神经网络(CNN)已经成为最主流的方法,比如GoogLenet,VGG-16,Incepetion等模型。CNN史上的一个里程碑事件是ResNet模型的出现,ResNet可以训练出更深的CNN模型,从而实现更高的准确度。ResNet模型的核心是通过建立前面层与后面层之间的“短路连接”(shortcuts,skip connection),进而训练出更深的CNN网络。
随着图像分类的准确率不断提高,网络的深度越来越深,图像分类的错误率也越来越低,从2012的AlexNet,2013年的ZFNet,2014年的GoogLeNet,再到后面2015年的ResNet,准确率已经超过了人类的水平,所以单纯从准确率方面考虑的话已经很难提升了;因此人们就开始从其他方面考虑,比如参数量和计算量,软硬件协同等。
今天我们要介绍的是Xception模型,Xception是Google继Inception后提出的对Inception V3的另一种改进,主要是采用深度可分离卷积(Depthwise Separable Convolution)来替换原来Inception V3中的卷积操作。
2.设计理念
前面说了,由于CNN模型的精度已经很难进一步提升,所以研究者们就把注意力放到了减少模型参数量和计算量上,因此Xception应运而生。而Xception就是研究者们在Inception V3模型上的进一步改进,通过用Depthwise Separable Convolution(深度可分离卷积)替换Inception V3中的多尺寸卷积核特征响应操作,最终达到了精度的略微提升和参数量的减少。在讲解Xception之前,我们先对它的前身Inception进行一番了解,然后再一步步往Xception方面讲述。
2.1 多尺寸卷积核
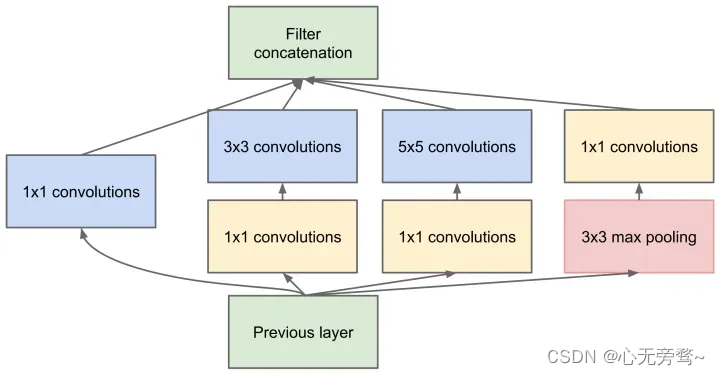
Inception 最初提出的版本,其核心思想就是使用多尺寸卷积核去观察输入数据。
举个例子,我们看某个景象由于远近不同,同一个物体的大小也会有所不同,那么不同尺度的卷积核观察的特征就会有这样的效果。于是就有了如下的网络结构图:
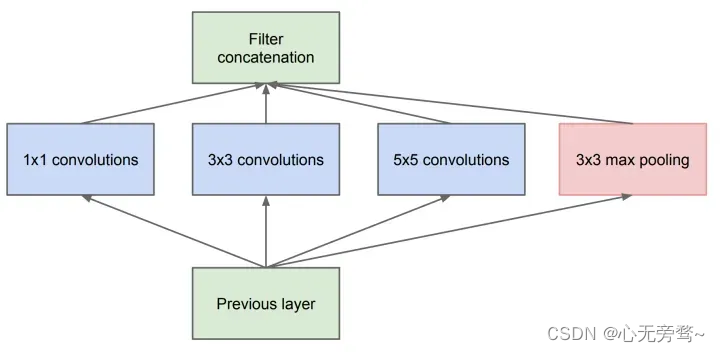
于是我们的网络就变胖了,增加了网络的宽度,同时也提高了对于不同尺度的适应程度。
2.2 点卷积
但是我们的网络变胖了的同时,计算量也变大了,所以我们就要想办法减少参数量来减少计算量,于是在 Inception v1 中的最终版本加上了 1x1 卷积核。
使用 1x1 卷积核对输入的特征图进行降维处理,这样就会极大地减少参数量,从而减少计算。
举个例子,输入数据的维度是 256 维,经过 1x1 卷积之后,我们输出的维度是 64 维,参数量是原来的 1 4 \frac{1}{4} 41 。
这就是 Pointwise Convolution,俗称叫做 1x1 卷积,简写为 PW,主要用于数据降维,减少参数量。
也有使用 PW 做升维的,在 MobileNet v2 中就使用 PW 将 3 个特征图变成 6 个特征图,丰富输入数据的特征。
想深入了解 MobileNet v2 的可以看看原文 MobileNet V2 - arxiv.org ,再对照地读这篇MobileNet V2 论文初读 - Michael Yuan。
2.3 卷积核替换
就算有了 PW ,由于 5x5 和 7x7 卷积核直接计算参数量还是非常大,训练时间还是比较长,我们还要再优化。
人类的智慧是无穷的,于是就想出了使用多个小卷积核替代大卷积核 的方法,这就是 Inception v3,如下图所示:
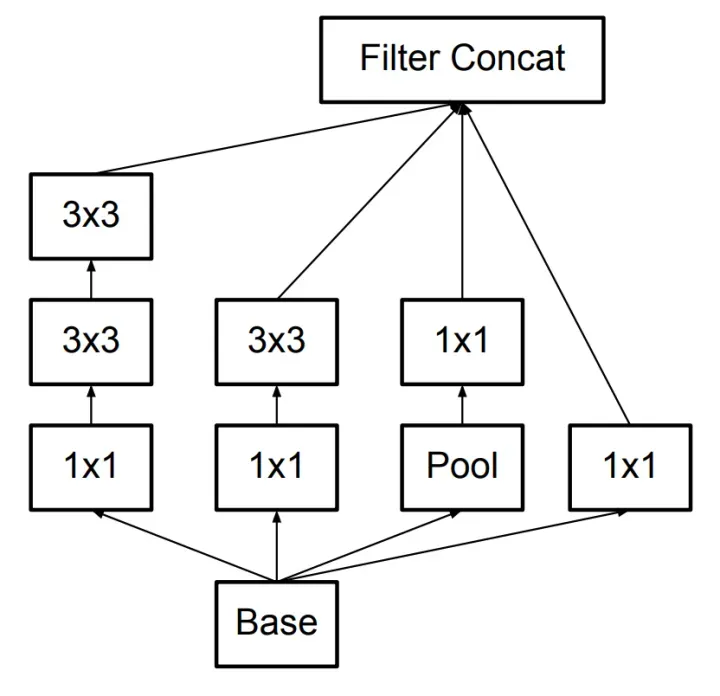
使用两个 3x3 卷积核来代替 5x5 卷积,效果上差不多,但参数量减少很多,达到了优化的目的。不仅参数量少,层数也多了,深度也变深了。
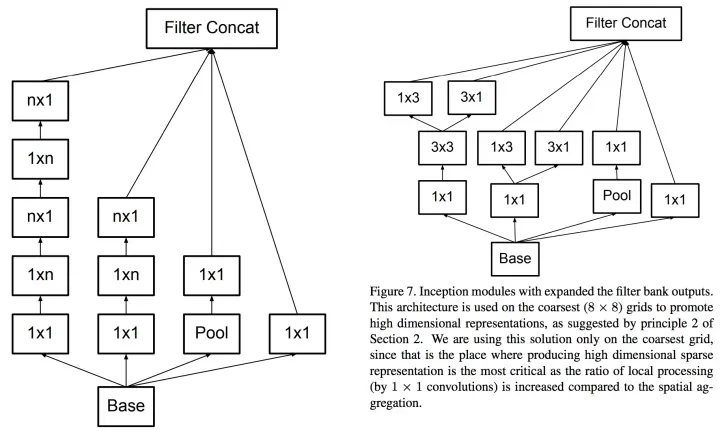
除了规整的的正方形,我们还有分解版本的 3x3 = 3x1 + 1x3,这个效果在深度较深的情况下比规整的卷积核更好。
我们假设输入 256 维,输出 512 维,计算一下参数量:
5x5 卷积核
256
×
5
×
5
×
512
=
3276800
256\times5\times5\times512=3276800
256×5×5×512=3276800
两个 3x3 卷积核
256
×
3
×
3
×
256
+
256
×
3
×
3
×
512
=
589824
+
1179648
=
1769472
256\times3\times3\times256+256\times3\times3\times512=589824+1179648=1769472
256×3×3×256+256×3×3×512=589824+1179648=1769472
结果对比
1769472
3276800
=
0.54
\frac{1769472}{3276800}=0.54
32768001769472=0.54
我们可以看到参数量对比,两个 3x3 的卷积核的参数量是 5x5 一半,可以大大加快训练速度。
2.4 Bottleneck
我们发现就算用了上面的结构和方法,我们的参数量还是很大,于是乎我们结合上面的方法创造出了 Bottleneck 的结构降低参数量。
Bottleneck 三步走是先 PW卷积 对数据进行降维,再进行常规卷积核的卷积,最后 PW 卷积对数据进行升维。我们举个例子,方便我们了解:

根据上图,我们来做个对比计算,假设输入 feature map 的维度为 256 维,要求输出维度也是 256 维。有以下两种操作:
● 直接使用 3x3 的卷积核。256 维的输入直接经过一个 3×3×256 的卷积层,输出一个 256 维的 feature map ,那么参数量为:256×3×3×256 = 589,824 。
● 先经过 1x1 的卷积核,再经过 3x3 卷积核,最后经过一个 1x1 卷积核。 256 维的输入先经过一个 1×1×64 的卷积层,再经过一个 3x3x64 的卷积层,最后经过 1x1x256 的卷积层,则总参数量为:256×1×1×64 + 64×3×3×64 + 64×1×1×256 = 69,632 。
经过两种方式的对比,我们可以很明显的看到后者的参数量远小于前者的。Bottleneck 的核心思想还是利用多个小卷积核替代一个大卷积核,利用 1x1 卷积核替代大的卷积核的一部分工作。
2.5 深度可分离卷积(Depthwise Separable Conv)
我们发现参数量还是很多,于是人们又想啊想,得出了 Depthwise Separable Conv 。这个idea最早是来自这篇论文 Design of Efficient Convolutional Layers using Single Intra-channel Convolution, Topological Subdivisioning and Spatial “Bottleneck” Structure,后面被 Google 用在 MobileNet 和 Xception 中发扬光大。
这个卷积的的大致意思是对每一个深度图分别进行卷积再融合,步骤是先 Depthwise Conv 再 Pointwise Conv,大大减少了参数量。下图是 Xception 模块的结构:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-MMOGpbfw-1687398336494)(https://ai-studio-static-online.cdn.bcebos.com/0133cb468d7e46ebb3e5a5a854f4f7939aadb080d5e6444da97c06c69859c045)]
大致的步骤是这样的:
● 分别按不同通道进行一次卷积(生成 输入通道数 张 Feature Maps)- DW
● 再将这些 Feature Maps 一起进行第二次卷积 - PW
文字看起来有点抽象,我们用例子来理解一下。
输入的是 2 维的数据,我们要进行 3x3 卷积并输出 3 维的数据,与正常卷积对比:
常规卷积运算
标准卷积的参数量计算公式(不带偏置)为:
输入特征图:
W
i
n
p
u
t
×
H
i
n
p
u
t
×
C
i
n
p
u
t
W_{input}\times H_{input}\times C_{input}
Winput×Hinput×Cinput
卷积核:
K
h
×
K
w
K_h\times K_w
Kh×Kw
输出特征图:
W
o
u
t
p
u
t
×
H
o
u
t
p
u
t
×
C
o
u
t
p
u
t
W_{output}\times H_{output}\times C_{output}
Woutput×Houtput×Coutput
参数量(既卷积核的参数):
C
i
n
p
u
t
×
K
h
×
K
w
×
C
o
u
t
=
3
×
3
×
3
×
4
=
108
C_{input}\times K_h\times K_w\times C_{out}=3\times3\times3\times4=108
Cinput×Kh×Kw×Cout=3×3×3×4=108
其中 W i n p u t W_{input} Winput表示输入特征图的宽, H i n p u t H_{input} Hinput表示输入特征图的高, C i n p u t C_{input} Cinput表示输入特征图的通道数。而 K h 和 K w K_h 和K_w Kh和Kw则表示卷积核高和宽的尺寸大小, W o u t p u t W_{output} Woutput表示输出特征图的宽, H o u t p u t H_{output} Houtput表示输出特征图的高, C o u t p u t C_{output} Coutput表示输出特征图的通道数。
DW卷积
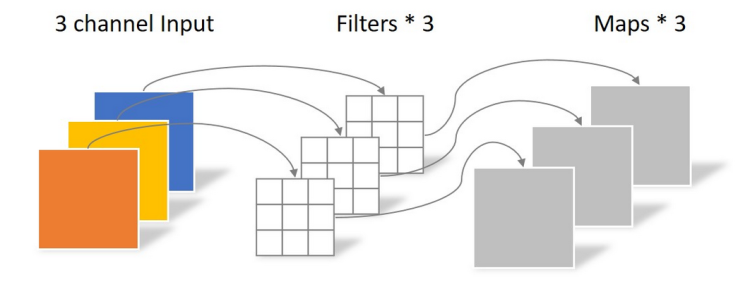
不同于常规卷积操作,Depthwise Convolution的一个卷积核负责一个通道,一个通道只被一个卷积核卷积。上面所提到的常规卷积每个卷积核是同时操作输入图片的每个通道。
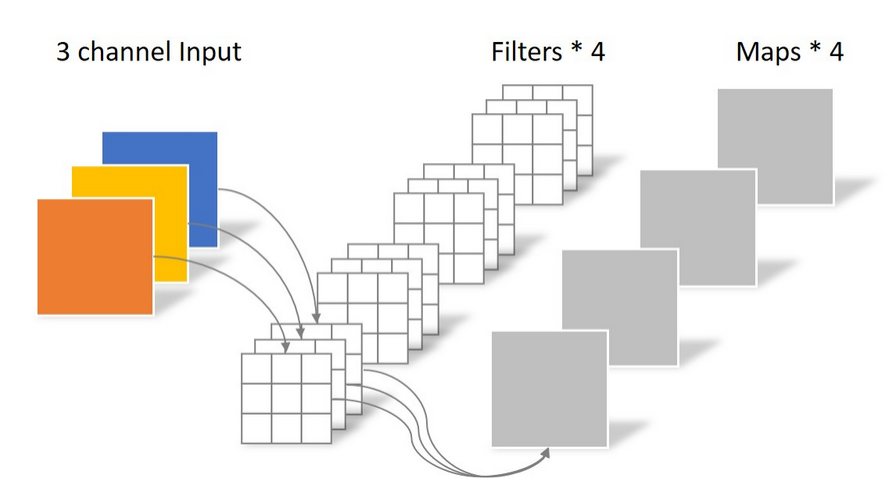
对于一张 5 × 5 5\times5 5×5像素、三通道彩色输入图片(shape为5×5×3),Depthwise Convolution首先经过第一次卷积运算,不同于上面的常规卷积,DW完全是在二维平面内进行。卷积核的数量与上一层的通道数相同(通道和卷积核一一对应)。所以一个三通道的图像经过运算后生成了3个Feature map(如果有same padding则尺寸与输入层相同为 5 × 5 5\times5 5×5)。
一个大小为 64 × 64 64\times64 64×64像素、三通道彩色图片首先经过第一次卷积运算,不同之处在于此次的卷积完全是在二维平面内进行,且卷积核(Filters)的数量与上一层的通道数相同。所以一个三通道的图像经过运算后生成了3个Feature map,如下图所示。
参数量为:
C
i
n
p
u
t
×
K
h
×
K
w
×
1
=
3
×
3
×
3
×
1
=
27
C_{input}\times K_h\times K_w\times 1=3\times3\times3\times 1=27
Cinput×Kh×Kw×1=3×3×3×1=27
Depthwise Convolution完成后的Feature map数量与输入层的通道数相同,但是这种运算对输入层的每个channel独立进行卷积运算后就结束了,没有有效的利用不同Feature map在相同空间位置上的信息。因此需要增加另外一步操作来将这些Feature map进行组合生成新的Feature map,即接下来的Pointwise Convolution。
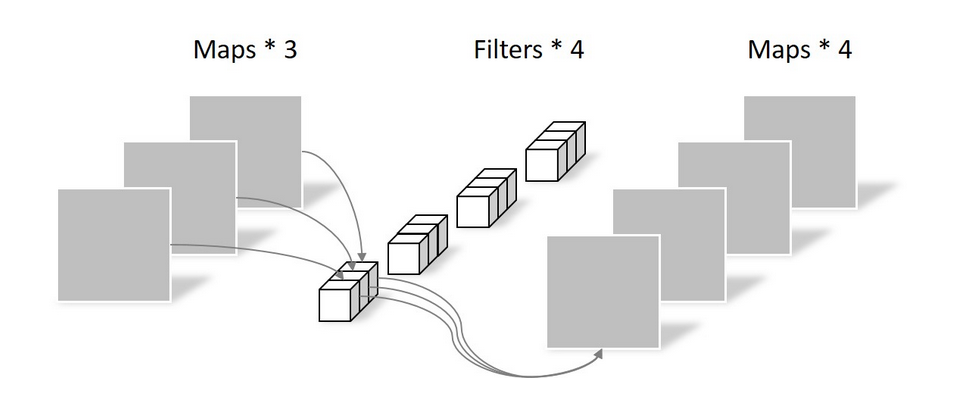
PW卷积
Pointwise Convolution的运算与常规卷积运算非常相似,不同之处在于卷积核的尺寸为 1 × 1 × M 1\times1\times M 1×1×M,M为上一层的通道数。所以这里的卷积运算会将上一步的Feature map在深度方向上进行加权组合,生成新的Feature map。有几个卷积核(Filters)就有几个Feature map。如下图所示。
参数量为:
C
i
n
p
u
t
×
1
×
1
×
C
o
u
t
p
u
t
=
3
×
1
×
1
×
4
=
12
C_{input}\times1\times 1\times C_{output}=3\times1\times1\times4=12
Cinput×1×1×Coutput=3×1×1×4=12
经过Pointwise Convolution之后,同样输出了4张Feature map,与常规卷积的输出维度相同。
Depthwise Separable Conv 卷积
标准的深度可分离卷积如下图所示:
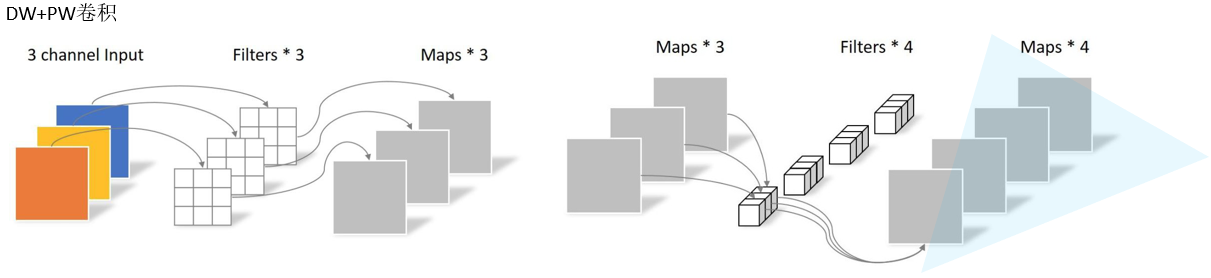
深度可分离卷积分为DW卷积和PW卷积,因此要分开计算再相加,参数量计算公式如下(不带偏置):
参数量公式: K h × K w × 1 × C i n p u t + 1 × 1 × C i n p u t × C o u t p u t K_{h}\times K_{w}\times1 \times C_{input} +1\times1\times C_{input}\times C_{output} Kh×Kw×1×Cinput+1×1×Cinput×Coutput
DW卷积参数量:
C
o
u
n
t
D
W
=
C
i
n
p
u
t
×
K
h
×
K
w
×
1
=
3
×
3
×
3
×
1
=
27
Count_{DW}=C_{input}\times K_h\times K_w\times 1=3\times3\times3\times 1=27
CountDW=Cinput×Kh×Kw×1=3×3×3×1=27
PW卷积参数量:
C
o
u
n
t
P
W
=
C
i
n
p
u
t
×
1
×
1
×
C
o
u
t
p
u
t
=
3
×
1
×
1
×
4
=
12
Count_{PW}=C_{input}\times1\times 1\times C_{output}=3\times1\times1\times4=12
CountPW=Cinput×1×1×Coutput=3×1×1×4=12
总的参数量:
C
o
u
n
t
D
W
+
C
o
u
n
t
P
W
=
3
×
3
×
3
×
1
+
3
×
1
×
1
×
4
=
27
+
12
=
39
Count_{DW}+Count_{PW}=3\times3\times3\times1+3\times1\times1\times4=27+12=39
CountDW+CountPW=3×3×3×1+3×1×1×4=27+12=39
参数量对比
39
108
=
0.36
\frac{39}{108}=0.36
10839=0.36
我们可以看到,参数量是正常卷积的将近一半,但实际上可以更少,只不过在输入输出维度相差不大的情况下,效果没那么明显。
理论计算
P
D
W
=
I
×
D
k
×
D
k
+
I
×
O
P_{DW}=I\times D_k\times D_k +I\times O
PDW=I×Dk×Dk+I×O
P
N
o
r
m
a
l
=
I
×
D
k
×
D
k
×
O
P_{Normal}=I\times D_k\times D_k \times O
PNormal=I×Dk×Dk×O
P
D
W
P
N
o
r
m
a
l
=
1
O
+
1
D
k
2
≈
1
D
k
2
\frac{P_{DW}}{P_{Normal}}=\frac{1}{O}+\frac{1}{D^{2}_{k}}\approx \frac{1}{D^{2}_{k}}
PNormalPDW=O1+Dk21≈Dk21
其中 I I I为输入通道数, O O O 是输出通道数, D k D_k Dk 是标准卷积核大小。
我们可以看到,当我们使用 3x3 卷积核的时候,参数量约等于标准卷积核的 1 9 \frac{1}{9} 91 ,大大减少参数量,从而加快训练速度。因此,在理论上普通卷积参数量是深度可分离卷积的9倍左右。
这里需要说明的是,Xception模型中的Depthwiss Separable Conv和传统的不太一样,传统的Depthwise Separable Conv是先进行 3 × 3 3\times3 3×3卷积,再进行 1 × 1 1\times1 1×1卷积操作(类似于mobileNet中的一样),而Xception模型中则是先进行 1 × 1 1\times1 1×1卷积,再进行 3 × 3 3\times3 3×3卷积操作,但中间为了保证数据不被破坏,没有添加Relu层,而mobileNet与它不同的是中间添加了Relu层。
3.网络结构
Xception的具体网络结构如图所示:
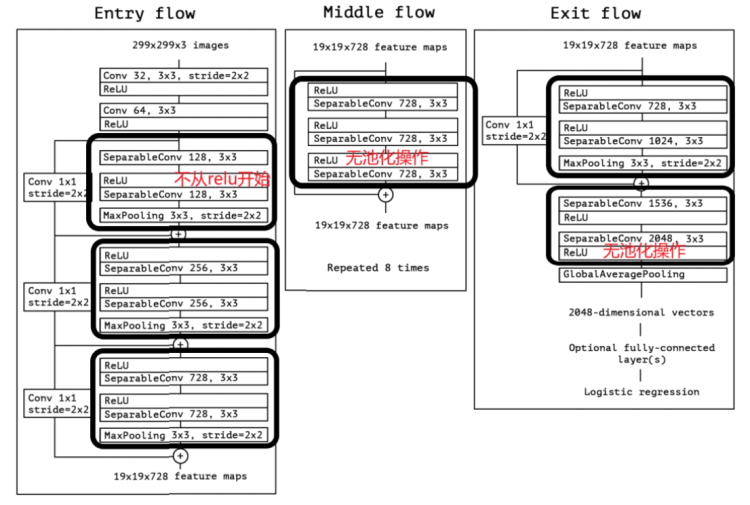
Xception包含三个部分:输入部分(Entry flow),中间部分(Middle flow)和结尾部分(Exit flow);其中所有卷积层和可分离卷积层后面都使用Batch Normalization处理,所有的可分离卷积层使用一个深度乘数1(深度方向并不进行扩充)。
- 对于Entry flow,首先使用了两个3x3卷积(conv1,conv2)降低特征图尺寸,同时增加了特征图个数;接着是3个含跳连的深度可分离卷积堆叠模块。
- 对于Middle flow,包含了8个一模一样的含跳连的深度可分离卷积堆叠模块。
- 对于Exit flow,首先是一个含跳连的深度可分离卷积堆叠模块,接着是一些深度可分离卷积层以及全局平均池化层,最后用全连接层输出分类结果。
4.评估分析
Xception论文中主要在JFT数据集与ImageNet数据集上与Inception V3模型做了比较,Xception和Inception V3模型的参数量大小如下图所示:

由此可以看出, 在参数量和速度,Xception参数量少于Inception V3,但速度更快。 同时与Inception V3相比,在分类性能上,Xception在ImageNet上领先较小,但在JFT上领先很多。
在ImageNet数据集下的测试结果如下图所示:
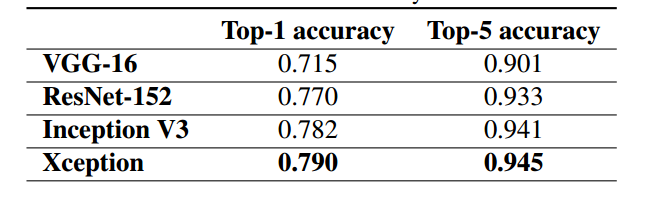
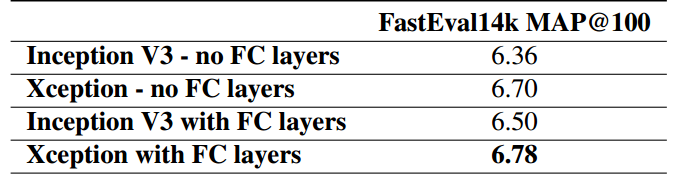
在JFT数据集下的测试结果如下图所示:
二、数据预处理
# 解压数据集
!unzip /home/aistudio/data/data223822/bird_photos.zip -d /home/aistudio/work/dataset
由于我们处理数据集文件的时候,里面多一个ipynb_checkpoints文件,因此需要通过以下命令删除以下。切记!一定要删除~
%cd /home/aistudio/work/dataset
!rm -rf .ipynb_checkpoints
# 划分数据集
import os
import random
train_ratio = 0.7
test_ratio = 1-train_ratio
rootdata = "/home/aistudio/work/dataset"
train_list, test_list = [],[]
data_list = []
class_flag = -1
for a,b,c in os.walk(rootdata):
for i in range(len(c)):
data_list.append(os.path.join(a,c[i]))
for i in range(0, int(len(c)*train_ratio)):
train_data = os.path.join(a, c[i])+' '+str(class_flag)+'\n'
train_list.append(train_data)
for i in range(int(len(c)*train_ratio),len(c)):
test_data = os.path.join(a,c[i])+' '+str(class_flag)+'\n'
test_list.append(test_data)
class_flag += 1
random.shuffle(train_list)
random.shuffle(test_list)
with open('/home/aistudio/work/train.txt','w',encoding='UTF-8') as f:
for train_img in train_list:
f.write(str(train_img))
with open('/home/aistudio/work/test.txt', 'w', encoding='UTF-8') as f:
for test_img in test_list:
f.write(test_img)
三、数据读取
首先我们先导入以下所需库。
import paddle
import paddle.nn.functional as F
import numpy as np
import math
import random
import os
from paddle.io import Dataset # 导入Datasrt库
import paddle.vision.transforms as transforms
import xception
from PIL import Image
然后使用 paddle.io.DataLoader 定义数据读取器
transform_BZ = transforms.Normalize(
mean=[0.5, 0.5, 0.5],
std=[0.5, 0.5, 0.5]
)
class LoadData(Dataset):
def __init__(self, txt_path, train_flag=True):
self.imgs_info = self.get_images(txt_path)
self.train_flag = train_flag
self.train_tf = transforms.Compose([
transforms.Resize(224), # 调整图像大小为224x224
transforms.RandomHorizontalFlip(), # 随机左右翻转图像
transforms.RandomVerticalFlip(), # 随机上下翻转图像
transforms.ToTensor(), # 将 PIL 图像转换为张量
transform_BZ # 执行某些复杂变换操作
])
self.val_tf = transforms.Compose([
transforms.Resize(224), # 调整图像大小为224x224
transforms.ToTensor(), # 将 PIL 图像转换为张量
transform_BZ # 执行某些复杂变换操作
])
def get_images(self, txt_path):
with open(txt_path, 'r', encoding='utf-8') as f:
imgs_info = f.readlines()
imgs_info = list(map(lambda x: x.strip().split(' '), imgs_info))
return imgs_info
def padding_black(self, img):
w, h = img.size
scale = 224. / max(w, h)
img_fg = img.resize([int(x) for x in [w * scale, h * scale]])
size_fg = img_fg.size
size_bg = 224
img_bg = Image.new("RGB", (size_bg, size_bg))
img_bg.paste(img_fg, ((size_bg - size_fg[0]) // 2,
(size_bg - size_fg[1]) // 2))
img = img_bg
return img
def __getitem__(self, index):
img_path, label = self.imgs_info[index]
img_path = os.path.join('',img_path)
img = Image.open(img_path)
img = img.convert("RGB")
img = self.padding_black(img)
if self.train_flag:
img = self.train_tf(img)
else:
img = self.val_tf(img)
label = int(label)
return img, label
def __len__(self):
return len(self.imgs_info)
加载训练集和测试集
train_data = LoadData("/home/aistudio/work/train.txt", True)
test_data = LoadData("/home/aistudio/work/test.txt", True)
#数据读取
train_loader = paddle.io.DataLoader(train_data, batch_size=16, shuffle=True)
test_loader = paddle.io.DataLoader(test_data, batch_size=16, shuffle=True)
四、导入模型
这里我们直接导入提前写好的xception文件,然后打印输出以下模型的参数信息。
import xception
import paddle
model = xception.Xception41(class_num=4)
params_info = paddle.summary(model,(1, 3, 224, 224))
print(params_info)
打印结果如下所示:
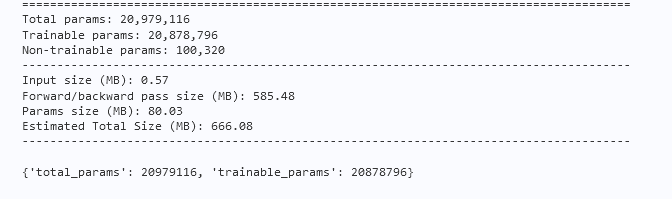
通过和Inception V3的参数量对比,我们发现确实降低了。
五、模型训练
epoch_num = 50 #训练轮数
batch_size = 16
learning_rate = 0.0001 #学习率
val_acc_history = []
val_loss_history = []
def train(model):
print('start training ... ')
# turn into training mode
model.train()
opt = paddle.optimizer.Adam(learning_rate=learning_rate,
parameters=model.parameters())
for epoch in range(epoch_num):
acc_train = []
for batch_id, data in enumerate(train_loader()):
x_data = data[0]
y_data = paddle.to_tensor(data[1],dtype="int64")
y_data = paddle.unsqueeze(y_data, 1)
logits = model(x_data)
loss = F.cross_entropy(logits, y_data)
acc = paddle.metric.accuracy(logits, y_data)
acc_train.append(acc.numpy())
if batch_id % 100 == 0:
print("epoch: {}, batch_id: {}, loss is: {}".format(epoch, batch_id, loss.numpy()))
avg_acc = np.mean(acc_train)
print("[train] accuracy: {}".format(avg_acc))
loss.backward()
opt.step()
opt.clear_grad()
# evaluate model after one epoch
model.eval()
accuracies = []
losses = []
for batch_id, data in enumerate(test_loader()):
x_data = data[0]
y_data = paddle.to_tensor(data[1],dtype="int64")
y_data = paddle.unsqueeze(y_data, 1)
logits = model(x_data)
loss = F.cross_entropy(logits, y_data)
acc = paddle.metric.accuracy(logits, y_data)
accuracies.append(acc.numpy())
losses.append(loss.numpy())
avg_acc, avg_loss = np.mean(accuracies), np.mean(losses)
print("[test] accuracy/loss: {}/{}".format(avg_acc, avg_loss))
val_acc_history.append(avg_acc)
val_loss_history.append(avg_loss)
model.train()
train(model)
paddle.save(model.state_dict(), "model.pdparams")
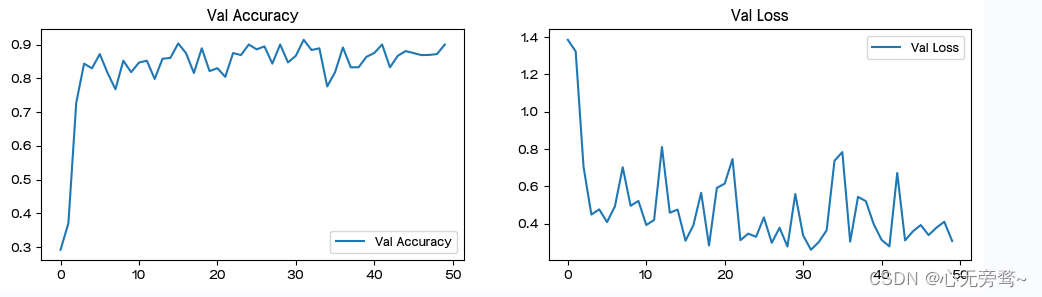
六、结果可视化
import matplotlib.pyplot as plt
#隐藏警告
import warnings
warnings.filterwarnings("ignore") #忽略警告信息
epochs_range = range(epoch_num)
plt.figure(figsize=(12, 3))
plt.subplot(1, 2, 1)
plt.plot(epochs_range, val_acc_history, label='Val Accuracy')
plt.legend(loc='lower right')
plt.title('Val Accuracy')
plt.subplot(1, 2, 2)
plt.plot(epochs_range, val_loss_history, label='Val Loss')
plt.legend(loc='upper right')
plt.title('Val Loss')
plt.show()
七、个体预测结果展示
data_transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Resize((224, 224)),
transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225))])
img = Image.open("/home/aistudio/work/dataset/Bananaquit/161.jpg")
plt.imshow(img)
image=data_transform(img)
plt.rcParams['font.sans-serif']=['FZHuaLi-M14S']
name=['蕉林莺','黑喉树莺','黑燕鸥类','凤头鹦鹉']
image=paddle.reshape(image,[1,3,224,224])
model.eval()
predict=model(image)
print(predict.numpy()) #明显可以看出是第0个标签大
plt.title(name[predict.argmax(1)])
plt.show()
可视化结果如下所示:
总结
- Xception(又称为 Extreme Inception)是一种卷积神经网络架构,在 2016 年由 Google 提出,它的名字是由 ‘Extreme’ 和 ‘Inception’ 两个词汇组成的。Xception 采用了 Inception 模型的思想,使用深度可分离卷积来代替传统的卷积,从而更加有效地减少了模型的参数数量和计算复杂度。
- 在传统的 Inception 模型中,每个计算单元采用了两个卷积层,一个 1x1 的卷积层用于降低特征图的通道数,紧接着是一个 3x3 的卷积层用于进行特征提取。而 Xception 则将 1x1 和 3x3 卷积逐次分开,使用了深度可分离卷积作为基本的计算单元。深度可分离卷积将标准卷积分解为两部分,首先使用深度卷积来处理每个输入通道,然后再使用 1x1 的逐点卷积来融合通道,从而获得与标准卷积近似的特征提取效果。而深度可分离卷积相较于标准卷积而言,可以明显降低参数量和训练计算量。
- 而使用深度可分离卷积单元取代了传统的卷积操作之后,Xception模型在计算效率,模型大小上都相比 InceptionV3 有大幅的提升。
- 总之,Xception模型的优势是在极大的减少了网络参数量和计算复杂度的同时,可以保持卓越的性能表现。因此,Xception模型已经被广泛地应用与图像分类、目标检测等任务中。