参考:
https://github.com/google/mediapipe
https://developers.google.com/mediapipe/solutions/guide
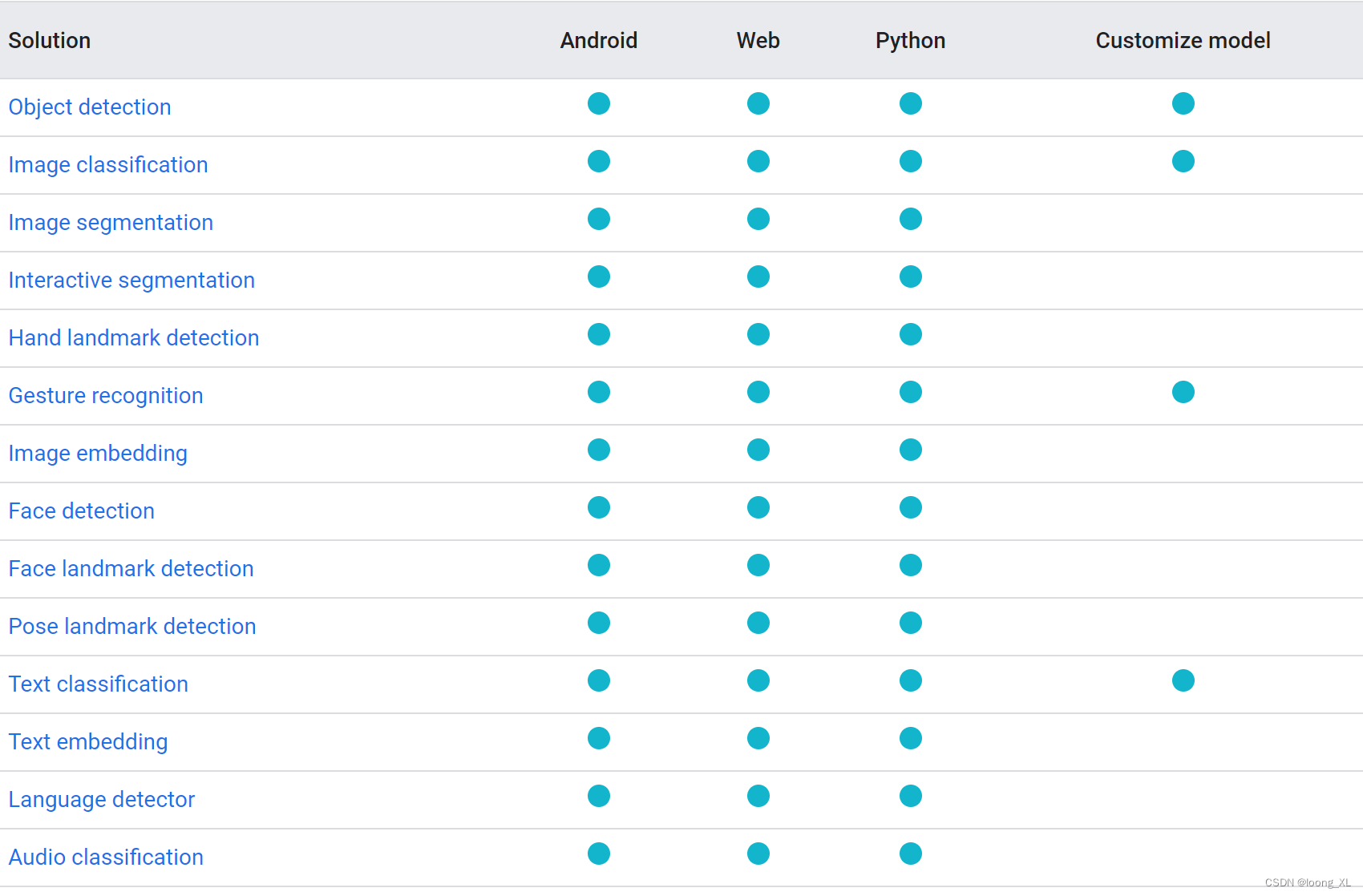
框架也支持cv、nlp、audio等项目,速度很快:
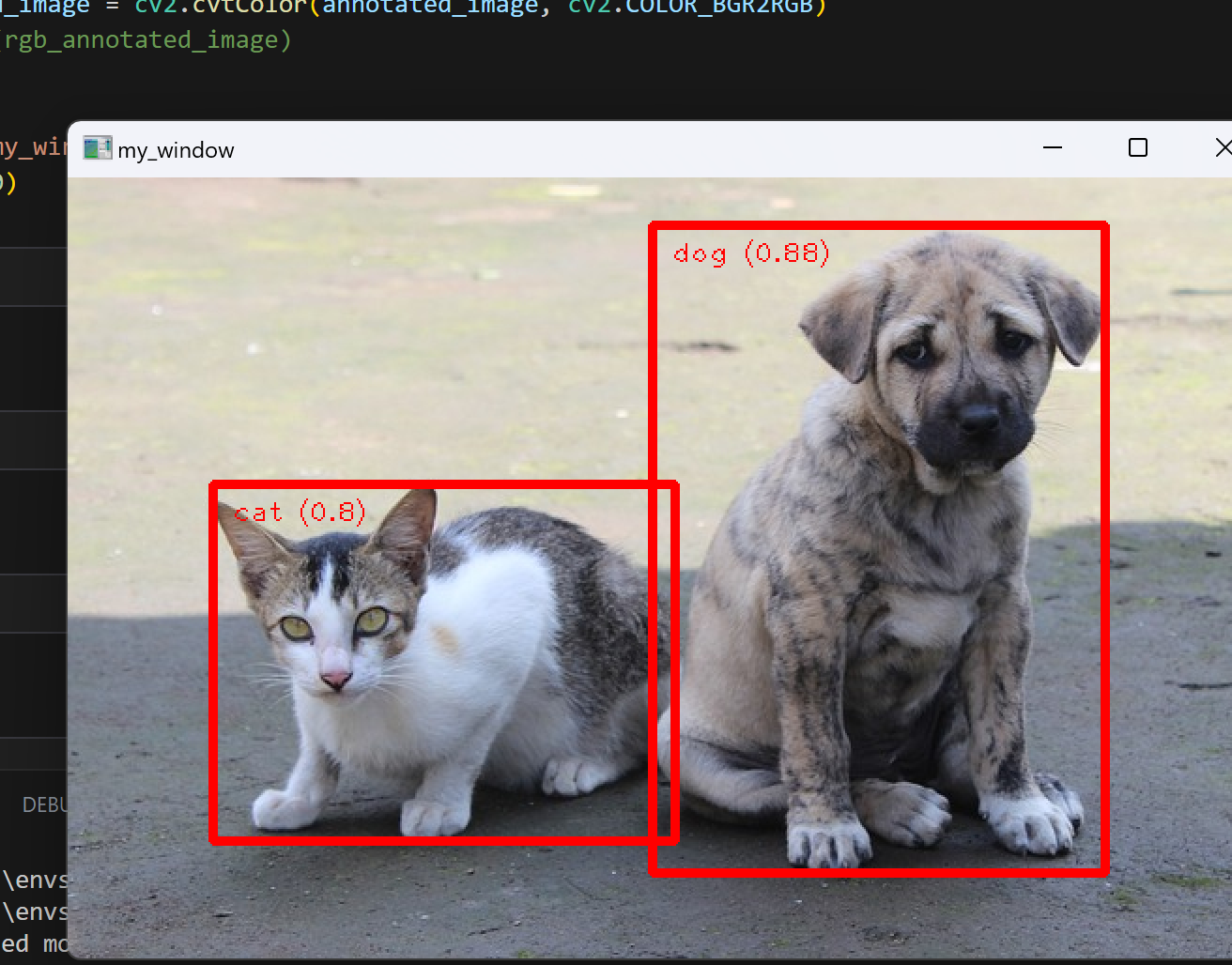
1、图形识别
参考:https://developers.google.com/mediapipe/solutions/vision/object_detector/python
https://github.com/google/mediapipe/blob/master/docs/solutions/face_mesh.md
模型下载:https://developers.google.com/mediapipe/solutions/vision/object_detector
代码:
import cv2
import numpy as np
IMAGE_FILE="cat_dog.png"
MARGIN = 10 # pixels
ROW_SIZE = 10 # pixels
FONT_SIZE = 1
FONT_THICKNESS = 1
TEXT_COLOR = (255, 0, 0) # red
def visualize(
image,
detection_result
) -> np.ndarray:
"""Draws bounding boxes on the input image and return it.
Args:
image: The input RGB image.
detection_result: The list of all "Detection" entities to be visualize.
Returns:
Image with bounding boxes.
"""
for detection in detection_result.detections:
# Draw bounding_box
bbox = detection.bounding_box
start_point = bbox.origin_x, bbox.origin_y
end_point = bbox.origin_x + bbox.width, bbox.origin_y + bbox.height
cv2.rectangle(image, start_point, end_point, TEXT_COLOR, 3)
# Draw label and score
category = detection.categories[0]
category_name = category.category_name
probability = round(category.score, 2)
result_text = category_name + ' (' + str(probability) + ')'
text_location = (MARGIN + bbox.origin_x,
MARGIN + ROW_SIZE + bbox.origin_y)
cv2.putText(image, result_text, text_location, cv2.FONT_HERSHEY_PLAIN,
FONT_SIZE, TEXT_COLOR, FONT_THICKNESS)
return image
# STEP 1: Import the necessary modules.
import numpy as np
import mediapipe as mp
from mediapipe.tasks import python
from mediapipe.tasks.python import vision
# STEP 2: Create an ObjectDetector object.
base_options = python.BaseOptions(model_asset_path='efficientdet_lite0.tflite')
options = vision.ObjectDetectorOptions(base_options=base_options,
score_threshold=0.5)
detector = vision.ObjectDetector.create_from_options(options)
# STEP 3: Load the input image.
image = mp.Image.create_from_file(IMAGE_FILE)
# STEP 4: Detect objects in the input image.
detection_result = detector.detect(image)
# STEP 5: Process the detection result. In this case, visualize it.
image_copy = np.copy(image.numpy_view())
annotated_image = visualize(image_copy, detection_result)
rgb_annotated_image = cv2.cvtColor(annotated_image, cv2.COLOR_BGR2RGB)
# cv2_imshow(rgb_annotated_image)
cv2.imshow('my_window',rgb_annotated_image)
cv2.waitKey(0)
2、人脸检测
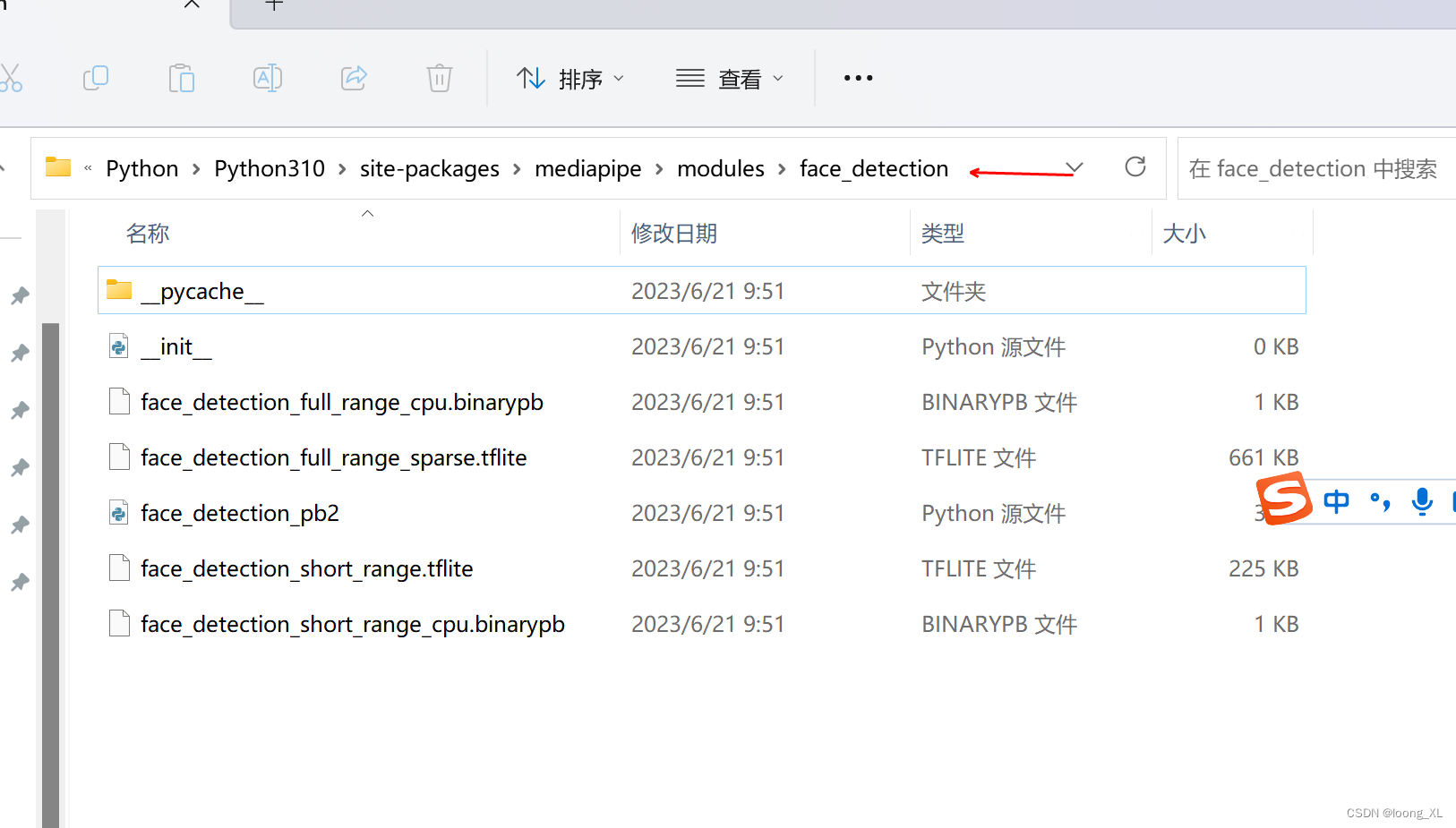
只输出检测坐标分类信息,没有向量等信息不可以用于后续人脸库检索,可能需要额外方法提取人脸向量特征
用高阶solutions接口,模型在安装mediapipe时就自动下载到如下modules目录了,solutions现在python支持的方法可以参考:
https://github.com/google/mediapipe/blob/master/docs/solutions/solutions.md

实时人脸 OpenCV摄像头:
import cv2
import time
import mediapipe as mp
class FaceDetector():
def __init__(self, confidence=0.5, model=0) -> None:
self.confidence = confidence
self.model = model
self.mp_draws = mp.solutions.drawing_utils
self.mp_faces = mp.solutions.face_detection
self.faces = self.mp_faces.FaceDetection(min_detection_confidence=confidence, model_selection=model)
def face_detection(self, image, draw=True, position=False):
img_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
results = self.faces.process(image)
lst_box = list()
if results.detections:
if draw:
for id, detection in enumerate(results.detections):
h, w, c = image.shape
r_bbox = detection.location_data.relative_bounding_box
print("-"*20)
bbox = int(r_bbox.xmin * w), int(r_bbox.ymin * h), \
int(r_bbox.width * w), int(r_bbox.height * h)
score = detection.score
print(bbox)
lst_box.append([id, bbox, score])
self.draw_box_detection(image, bbox, score)
# self.mp_draws.draw_detection(image, detection)
return lst_box
def draw_box_detection(self, image, bbox, score):
xmin, ymin = bbox[0], bbox[1]
h, w, c = image.shape
l = 30
cv2.rectangle(image, bbox, color=(255, 0, 255), thickness=1)
cv2.line(image, (xmin, ymin), (xmin+l, ymin), (255, 0, 255), thickness=5)
cv2.line(image, (xmin, ymin), (xmin, ymin+l), (255, 0, 255), thickness=5)
cv2.putText(image, f"{str(int(score[0] * 100))}%", (xmin, ymin - 10),
cv2.FONT_HERSHEY_PLAIN, fontScale=1.3,
color=(0, 255,0), thickness=1)
def main():
capture = cv2.VideoCapture(0)
face_detector = FaceDetector()
prev_time = 0
while True:
sucess, frame = capture.read()
lst_position = face_detector.face_detection(frame)
if len(lst_position) != 0:
print(lst_position[0])
# calculate fps
current_time = time.time()
fps = 1 / (current_time - prev_time)
prev_time = current_time
# put fps of video in display
cv2.putText(frame, f"{str(int(fps))}", (19, 50),
cv2.FONT_HERSHEY_PLAIN, 1.5,
(0, 255, 255), thickness=2)
# display video window
cv2.imshow("Video Display", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
capture.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
main()
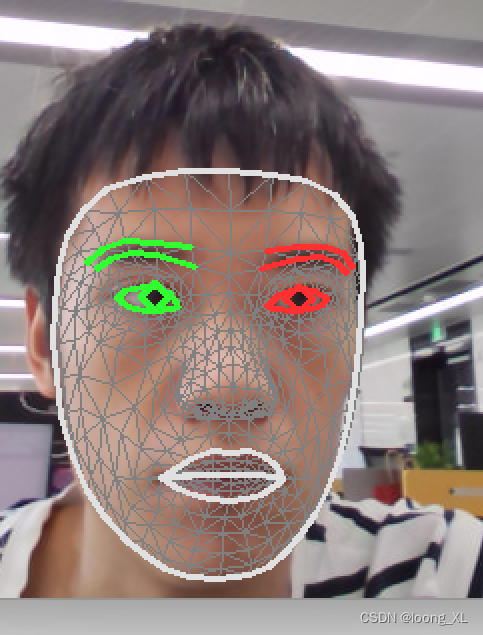
实时人脸mesh(参数设置支持检测人脸数量max_num_faces
Maximum number of faces to detect. Default to 1. ):
with mp_face_mesh.FaceMesh(
max_num_faces=3,
refine_landmarks=True,
min_detection_confidence=0.5,
min_tracking_confidence=0.5) as face_mesh:
import cv2
import time
import mediapipe as mp
class FaceMesh():
def __init__(self, mode=False, max_face=1,
refine_landmarks=False,
detect_confidence=0.5, track_confidence=0.5) -> None:
self.mode = mode
self.max_face = max_face
self.refine_landmarks = refine_landmarks
self.detect_confidence = detect_confidence
self.track_confidence = track_confidence
self.mp_draws = mp.solutions.drawing_utils
self.mp_face_mesh = mp.solutions.face_mesh
self.face_mesh = self.mp_face_mesh.FaceMesh(static_image_mode=self.mode,
max_num_faces=self.max_face,
refine_landmarks=self.refine_landmarks,
min_detection_confidence=self.detect_confidence,
min_tracking_confidence=self.track_confidence)
def draw_mesh(self, image, thickness=1, circle_radius=1, color=(0,255, 0)):
draw_spec = self.mp_draws.DrawingSpec(thickness=thickness, circle_radius=circle_radius, color=color)
img_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
results = self.face_mesh.process(img_rgb)
lst_mark = list()
if results.multi_face_landmarks:
h, w, c = image.shape
for face_id, landmarks in enumerate(results.multi_face_landmarks):
self.mp_draws.draw_landmarks(image, landmarks,
self.mp_face_mesh.FACEMESH_FACE_OVAL, draw_spec)
for id,mark in enumerate(landmarks.landmark):
cx, cy = mark.x, mark.y
lst_mark.append([face_id, id, cx, cy])
return lst_mark
def main():
capture = cv2.VideoCapture(0)
face_mesh = FaceMesh()
prev_time = 0
while True:
sucess, frame = capture.read()
lst_position = face_mesh.draw_mesh(frame)
if len(lst_position) != 0:
print(lst_position[0])
# calculate fps
current_time = time.time()
fps = 1 / (current_time - prev_time)
prev_time = current_time
# put fps of video in display
cv2.putText(frame, f"{str(int(fps))}", (19, 50), cv2.FONT_HERSHEY_PLAIN, 1.5, (0, 255, 255), thickness=2)
# display video window
cv2.imshow("Video Display", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
capture.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
main()
import cv2
import mediapipe as mp
mp_drawing = mp.solutions.drawing_utils
mp_drawing_styles = mp.solutions.drawing_styles
mp_face_mesh = mp.solutions.face_mesh
# For static images:
IMAGE_FILES = []
drawing_spec = mp_drawing.DrawingSpec(thickness=1, circle_radius=1)
with mp_face_mesh.FaceMesh(
static_image_mode=True,
max_num_faces=1,
refine_landmarks=True,
min_detection_confidence=0.5) as face_mesh:
for idx, file in enumerate(IMAGE_FILES):
image = cv2.imread(file)
# Convert the BGR image to RGB before processing.
results = face_mesh.process(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
# Print and draw face mesh landmarks on the image.
if not results.multi_face_landmarks:
continue
annotated_image = image.copy()
for face_landmarks in results.multi_face_landmarks:
print('face_landmarks:', face_landmarks)
mp_drawing.draw_landmarks(
image=annotated_image,
landmark_list=face_landmarks,
connections=mp_face_mesh.FACEMESH_TESSELATION,
landmark_drawing_spec=None,
connection_drawing_spec=mp_drawing_styles
.get_default_face_mesh_tesselation_style())
mp_drawing.draw_landmarks(
image=annotated_image,
landmark_list=face_landmarks,
connections=mp_face_mesh.FACEMESH_CONTOURS,
landmark_drawing_spec=None,
connection_drawing_spec=mp_drawing_styles
.get_default_face_mesh_contours_style())
mp_drawing.draw_landmarks(
image=annotated_image,
landmark_list=face_landmarks,
connections=mp_face_mesh.FACEMESH_IRISES,
landmark_drawing_spec=None,
connection_drawing_spec=mp_drawing_styles
.get_default_face_mesh_iris_connections_style())
cv2.imwrite('/tmp/annotated_image' + str(idx) + '.png', annotated_image)
# For webcam input:
drawing_spec = mp_drawing.DrawingSpec(thickness=1, circle_radius=1)
cap = cv2.VideoCapture(0)
with mp_face_mesh.FaceMesh(
max_num_faces=1,
refine_landmarks=True,
min_detection_confidence=0.5,
min_tracking_confidence=0.5) as face_mesh:
while cap.isOpened():
success, image = cap.read()
if not success:
print("Ignoring empty camera frame.")
# If loading a video, use 'break' instead of 'continue'.
continue
# To improve performance, optionally mark the image as not writeable to
# pass by reference.
image.flags.writeable = False
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
results = face_mesh.process(image)
# Draw the face mesh annotations on the image.
image.flags.writeable = True
image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)
if results.multi_face_landmarks:
for face_landmarks in results.multi_face_landmarks:
mp_drawing.draw_landmarks(
image=image,
landmark_list=face_landmarks,
connections=mp_face_mesh.FACEMESH_TESSELATION,
landmark_drawing_spec=None,
connection_drawing_spec=mp_drawing_styles
.get_default_face_mesh_tesselation_style())
mp_drawing.draw_landmarks(
image=image,
landmark_list=face_landmarks,
connections=mp_face_mesh.FACEMESH_CONTOURS,
landmark_drawing_spec=None,
connection_drawing_spec=mp_drawing_styles
.get_default_face_mesh_contours_style())
mp_drawing.draw_landmarks(
image=image,
landmark_list=face_landmarks,
connections=mp_face_mesh.FACEMESH_IRISES,
landmark_drawing_spec=None,
connection_drawing_spec=mp_drawing_styles
.get_default_face_mesh_iris_connections_style())
# Flip the image horizontally for a selfie-view display.
cv2.imshow('MediaPipe Face Mesh', cv2.flip(image, 1))
if cv2.waitKey(5) & 0xFF == 27:
break
cap.release()
3、关键点检测
参考:https://www.hackersrealm.net/post/realtime-human-pose-estimation-using-python
https://github.com/realsanjeev/Object-Detection-using-OpenCV
https://github.com/google/mediapipe/blob/master/docs/solutions/pose.md
import cv2
import mediapipe as mp
import time
class PoseDetector():
def __init__(self, mode=False, complexity=1, smooth_landmarks=True,
enable_segmentation=False, smooth_segmentation=True,
detection_confidence=0.5, tracking_confidence=0.5) -> None:
self.mode = mode
self.complexity = complexity
self.smooth_landmarks = smooth_landmarks
self.enable_segmentation = enable_segmentation
self.smooth_segmentations = smooth_segmentation
self.detection_confidence = detection_confidence
self.tracking_confidence = tracking_confidence
self.mp_pose = mp.solutions.pose
self.mp_draw = mp.solutions.drawing_utils
self.poses = self.mp_pose.Pose(static_image_mode=self.mode,
model_complexity=self.complexity,
smooth_landmarks=self.smooth_landmarks,
enable_segmentation=self.enable_segmentation,
smooth_segmentation=self.smooth_segmentations,
min_detection_confidence=self.detection_confidence,
min_tracking_confidence=self.tracking_confidence
)
def findPose(self, image, draw=True, postion_mark=False):
img_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
results = self.poses.process(img_rgb)
lst_mark_postion = list()
if results.pose_landmarks:
if draw:
self.mp_draw.draw_landmarks(image, results.pose_landmarks,
self.mp_pose.POSE_CONNECTIONS)
if postion_mark:
for id, mark in enumerate(results.pose_landmarks.landmark):
h, w, c = image.shape
cx, cy = int(mark.x * w), int(mark.y * h)
lst_mark_postion.append([id, cx, cy])
return lst_mark_postion
pose_detector = PoseDetector()
cap = cv2.VideoCapture(0)
while cap.isOpened():
# read frame
_, frame = cap.read()
try:
# resize the frame for portrait video
# frame = cv2.resize(frame, (350, 600))
# convert to RGB
frame_rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
# process the frame for pose detection
pose_results = pose_detector.poses.process(frame_rgb)
# print(pose_results.pose_landmarks)
# draw skeleton on the frame
pose_detector.mp_draw.draw_landmarks(frame, pose_results.pose_landmarks, pose_detector.mp_pose.POSE_CONNECTIONS)
# display the frame
cv2.imshow('Output', frame)
except:
break
if cv2.waitKey(1) == ord('q'):
break
cap.release()
cv2.destroyAllWindows()