系列文章目录
第一章 AlexNet网络详解
第二章 VGG网络详解
第三章 GoogLeNet网络详解
第四章 ResNet网络详解
第五章 ResNeXt网络详解
第六章 MobileNetv1网络详解
第七章 MobileNetv2网络详解
第八章 MobileNetv3网络详解
第九章 ShuffleNetv1网络详解
第十章 ShuffleNetv2网络详解
第十一章 EfficientNetv1网络详解
第十二章 EfficientNetv2网络详解
第十三章 Transformer注意力机制
第十四章 Vision Transformer网络详解
第十五章 Swin-Transformer网络详解
第十六章 ConvNeXt网络详解
第十七章 RepVGG网络详解
第十八章 MobileViT网络详解
文章目录
- ResNet网络详解
- 0. 前言
- 1. 摘要
- 2. ResNet网络详解网络架构
- 1. ResNet_Model.py(pytorch实现)
- 2.
- 总结
0、前言
1、摘要
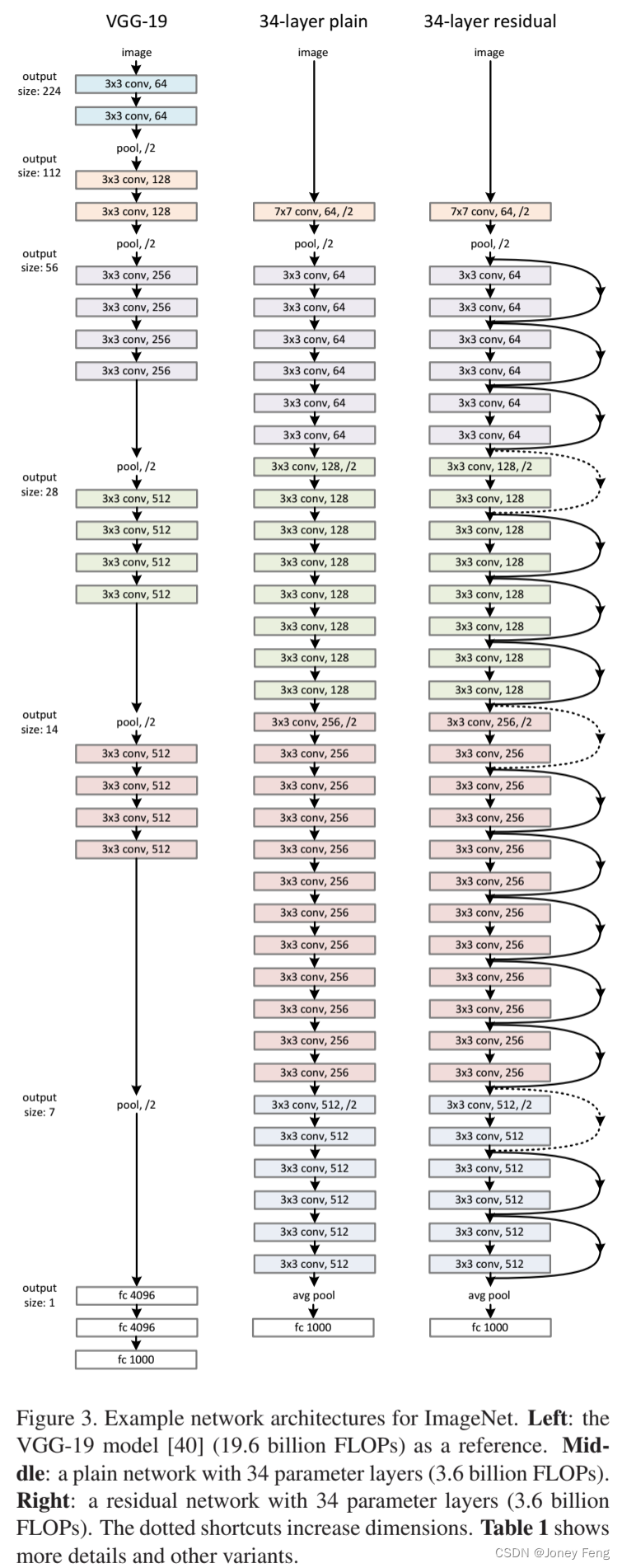
更深的神经网络更难训练。我们提出了一个残差学习框架,以便训练比以前使用的网络更深。我们将层明确重组为以层输入为参考的学习残差函数,而不是学习无关的函数。我们提供了全面的实证证据,表明这些残差网络更容易优化,并且可以通过大幅增加深度获得更高的准确性。在ImageNet数据集上,我们评估了深度达152层的残差网络,比VGG网络[40]深8倍,但复杂度仍然较低。这些残差网络的组合在ImageNet测试集上实现3.57%的错误率。这个结果赢得了ILSVRC 2015分类任务的第一名。我们还对具有100和1000层的CIFAR-10进行了分析。表示的深度对于许多视觉识别任务具有重要意义。仅仅由于我们极其深的表示,我们在COCO物体检测数据集上获得了28%的相对改进。深层残差网络是我们提交给ILSVRC和COCO 2015比赛的基础,其中我们还赢得了ImageNet检测、ImageNet定位、COCO检测和COCO分割任务的第一名。
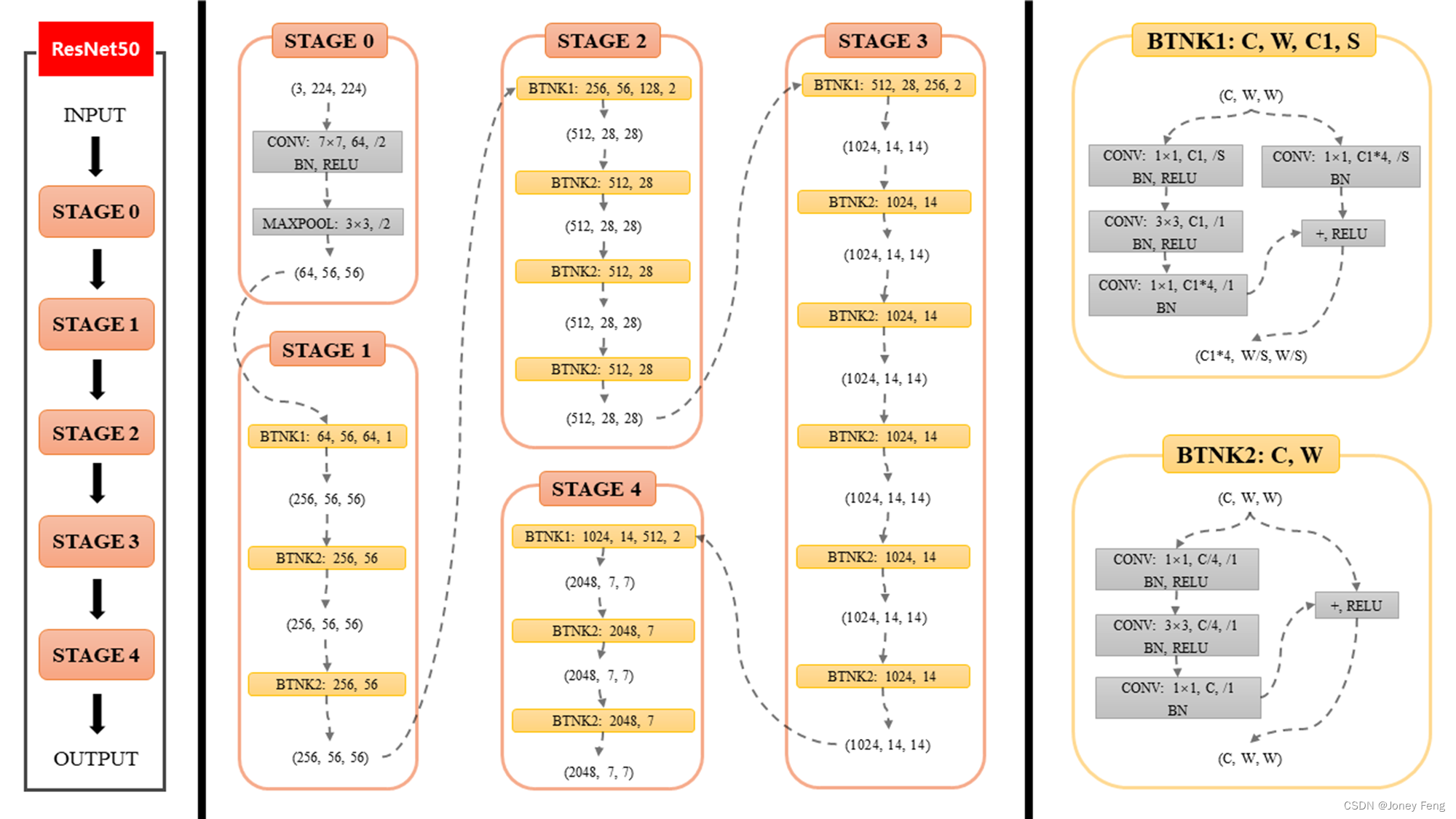
2、ResNet网络结构
1.本文介绍了一种深度神经网络的学习框架,使得更深层次的网络更容易训练和优化。
2.本文的研究背景是深度神经网络在训练和优化方面的困难。
3.本文的主要论点是,通过引入残差学习框架,可以更轻松地训练和优化深度神经网络,并在多个视觉识别任务中获得更高的准确率。
4.过去的研究主要采用传统的前向传播方法来训练和优化神经网络,但在深度增加时很难解决梯度消失和梯度爆炸的问题。这些方法也容易导致网络过拟合和训练缓慢。
5.本文提出的方法是引入残差学习框架,重定义网络层的学习方式为学习残差函数,从而实现更深层次网络的训练和优化。
6.研究发现,在多个视觉识别任务中,通过残差学习框架训练的深度神经网络可以获得更高的准确率。该方法在2015年的多个比赛中获得了第一名的好成绩。但是,由于本文研究主要关注残差学习框架在视觉识别任务中的应用,因此在其他领域的适用性还需要进一步探讨。
ResNet网络解决了深度神经网络训练过程中的梯度消失和梯度爆炸问题。梯度消失问题是由于当神经网络过深时,反向传播算法中的梯度值会变得非常小,可能会接近于0。这使得神经网络无法更新权重,从而无法继续学习。而梯度爆炸则是相反的问题,即梯度值过大,导致权重更新过快,从而使得网络失去稳定性。 ResNet的创新点是通过引入残差连接(residual connections)解决了梯度消失和梯度爆炸问题。残差连接直接连接了网络中前一层和后一层的输出,使得后一层不仅学习新的特征,还能保留前一层学习到的特征。这种方法使得神经网络的训练变得更加稳定,深度网络也变得更易于训练。此外,ResNet还创新性地使用了1x1卷积来降低特征图的维度,从而减少了模型参数,提高了效率。


1.ResNet_Model.py(pytorch实现)
import torch.nn as nn
import torch
class AlexNet(nn.Module):
def __init__(self,num_classes=1000,init_weights=False):
super(AlexNet, self).__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 48, kernel_size=11, stride=4, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(48, 128, kernel_size=5, stride=1, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(128, 192, kernel_size=3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(192, 192, kernel_size=3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(192, 128, kernel_size=3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3,stride=2)
)
self.classifier = nn.Sequential(
nn.Dropout(p=0.5),
nn.Linear(128*6*6, 2048),
nn.ReLU(inplace=True),
nn.Dropout(p=0.5),
nn.Linear(2048, 2048),
nn.ReLU(inplace=True),
nn.Linear(2048, num_classes)
)
if init_weights:
self._initialize_weights()
def forward(self, x):
x = self.features(x)
x = torch.flatten(x, start_dim=1)
x = self.classifier(x)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.constant_(m.bias, 0)
2.train.py
import os
import sys
import json
import torch
import torch.nn as nn
from torchvision import transforms, datasets, utils
import matplotlib.pyplot as plt
import numpy as np
import torch.optim as optim
from tqdm import tqdm
from model import AlexNet
def main():
device = torch.device("cuda:0" if torch.cuda.is_available() else 'cpu')
print("using {} device.".format(device))
data_transform = {
"train": transforms.Compose([transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]),
"val": transforms.Compose([transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])}
data_root = 'D:/100_DataSets/'
image_path = os.path.join(data_root, "03_flower_data")
assert os.path.exists(image_path), "{} path does not exits.".format(image_path)
train_dataset = datasets.ImageFolder(root=os.path.join(image_path, "train"),transform = data_transform['train'])
train_num = len(train_dataset)
flower_list = train_dataset.class_to_idx
cla_dict = dict((val, key) for key, val in flower_list.items())
json_str = json.dumps(cla_dict, indent=4)
with open('class_indices.json', 'w') as json_file:
json_file.write(json_str)
batch_size = 6
nw = min([os.cpu_count(), batch_size if batch_size > 1 else 0, 8])
print('Using {} dataloder workers every process'.format(nw))
train_loader = torch.utils.data.DataLoader(train_dataset,
batch_size=batch_size,
shuffle=True,
num_workers=nw)
validate_dataset = datasets.ImageFolder(root=os.path.join(image_path, "val"),
transform=data_transform['val'])
val_num = len(validate_dataset)
validate_loader = torch.utils.data.DataLoader(validate_dataset,
batch_size=4,
shuffle=False,
num_workers=nw)
print("using {} image for train, {} images for validation.".format(train_num, val_num))
net = AlexNet(num_classes=5, init_weights=True)
net.to(device)
loss_fuction = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=0.0002)
epochs = 10
save_path = './AlexNet.pth'
best_acc = 0.0
train_steps = len(train_loader)
for epoch in range(epochs):
net.train()
running_loss = 0.0
train_bar = tqdm(train_loader, file=sys.stdout)
for step, data in enumerate(train_bar):
images, labels = data
optimizer.zero_grad()
outputs = net(images.to(device))
loss = loss_fuction(outputs, labels.to(device))
loss.backward()
optimizer.step()
running_loss += loss.item()
train_bar.desc = "train epoch[{}/{}] loss:{:,.3f}".format(epoch+1, epochs, loss)
net.eval()
acc = 0.0
with torch.no_grad():
val_bar = tqdm(validate_loader, file=sys.stdout)
for val_data in val_bar:
val_images, val_labels = val_data
outputs = net(val_images.to(device))
predict_y = torch.max(outputs, dim=1)[1]
acc += torch.eq(predict_y, val_labels.to(device)).sum().item()
val_accurate = acc / val_num
print('[epoch % d] train_loss: %.3f val_accuracy: %.3f' %
(epoch+1, running_loss / train_steps, val_accurate))
if val_accurate > best_acc:
best_acc = val_accurate
torch.save(net.state_dict(),save_path)
print("Finished Training")
if __name__ == '__main__':
main()
3.predict.py
import os
import json
import torch
from PIL import Image
from torchvision import transforms
import matplotlib.pyplot as plt
from model import AlexNet
def main():
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
data_transform = transforms.Compose(
[transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5),(0.5, 0.5, 0.5))]
)
img_path = "D:/20_Models/01_AlexNet_pytorch/image_predict/tulip.jpg"
assert os.path.exists(img_path), "file: '{}' does not exist.".format(img_path)
img = Image.open(img_path)
plt.imshow(img)
img = data_transform(img)
img = torch.unsqueeze(img, dim=0)
json_path = './class_indices.json'
assert os.path.exists(json_path), "file: '{}' does not exist.".format(json_path)
with open(json_path,"r") as f:
class_indict = json.load(f)
model = AlexNet(num_classes=5).to(device)
weights_path = "./AlexNet.pth"
assert os.path.exists(weights_path), "file: '{}' does not exist.".format(weights_path)
model.load_state_dict(torch.load(weights_path))
model.eval()
with torch.no_grad():
output = torch.squeeze(model(img.to(device))).cpu()
predict = torch.softmax(output, dim=0)
predict_cla = torch.argmax(predict).numpy()
print_res = "class: {} prob: {:.3f}".format(class_indict[str(predict_cla)],
predict[predict_cla].numpy())
plt.title(print_res)
for i in range(len(predict)):
print("class: {:10} prob: {:.3}".format(class_indict[str(i)],predict[i].numpy()))
plt.show()
if __name__ == '__main__':
main()4.predict.py
import os
from shutil import copy, rmtree
import random
def mk_file(file_path: str):
if os.path.exists(file_path):
rmtree(file_path)
os.makedirs(file_path)
def main():
random.seed(0)
split_rate = 0.1
#cwd = os.getcwd()
#data_root = os.path.join(cwd, "flower_data")
data_root = 'D:/100_DataSets/03_flower_data'
origin_flower_path = os.path.join(data_root, "flower_photos")
assert os.path.exists(origin_flower_path), "path '{}' does not exist".format(origin_flower_path)
flower_class = [cla for cla in os.listdir(origin_flower_path) if os.path.isdir(os.path.join(origin_flower_path, cla))]
train_root = os.path.join(data_root,"train")
mk_file(train_root)
for cla in flower_class:
mk_file(os.path.join(train_root, cla))
val_root = os.path.join(data_root, "val")
mk_file(val_root)
for cla in flower_class:
mk_file(os.path.join(val_root,cla))
for cla in flower_class:
cla_path = os.path.join(origin_flower_path,cla)
images = os.listdir(cla_path)
num = len(images)
eval_index = random.sample(images, k=int(num*split_rate))
for index, image in enumerate(images):
if image in eval_index:
image_path = os.path.join(cla_path, image)
new_path = os.path.join(val_root, cla)
copy(image_path, new_path)
else:
image_path = os.path.join(cla_path, image)
new_path = os.path.join(train_root, cla)
copy(image_path, new_path)
print("\r[{}] processing [{} / {}]".format(cla, index+1, num), end="")
print()
print("processing done!")
if __name__ == "__main__":
main()
总结
提示:这里对文章进行总结:
每天一个网络,网络的学习往往具有连贯性,新的网络往往是基于旧的网络进行不断改进。




![[进阶]网络通信:UDP通信,一发一收、多发多收](https://img-blog.csdnimg.cn/62e62086ea1346e7ba0ccb32535749cd.png)




![[保姆级啰嗦教程] Tesseract OCR 5在Windows 10下编译安装及测试 (亲测成功)](https://img-blog.csdnimg.cn/194b86a7c9ee4341888fdb1899f50e0e.png#pic_center)
![[SpringBoot 分布式调度elasticjob 整合 ]](https://img-blog.csdnimg.cn/14e427049b574c098b97d878911393d8.png)