文章目录
- 一、什么是定时器
- 二、定时器有什么用
- 三、通用定时器详细介绍
- 3.1 时钟来源
- 3.2 预分频器,计数器,自动重装载寄存器
- 3.2.1 预分频器
- 3.2.2 计数器
- 3.2.3 自动重装载寄存器
- 3.3 触发控制器
- 四、PWM
- 4.1 什么是PWM
- 4.2 什么是占空比
- 4.3 STM32F1 PWM介绍
- 4.4 PWM频率计算
- 五、通用定时器输出引脚
- 六、实战项目
- 6.1 呼吸灯
- 6.2 实现思路
- 6.3 定时器配置
- 6.4 定时器中断实现呼吸灯
- 6.5 使用PWM实现呼吸灯
- 七、拓展
一、什么是定时器
关于什么是定时器,简单来讲,就是是用来定时的。STM32F103ZET6有两个基本定时器TIM6和TIM7,四个通用定时器TIM2~TIM5和两个高级定时器TIM1,TIM8。每一个定时器都是完全独立的,不共享任何资源。
根据中文参考手册介绍,基本定时器最为简单,类似于51单片机的定时器。通用定时器在基本定时器的基础上增加了输入捕获和输出比较功能。高级定时器相比通用定时器,又增加了可编程死区互补输出,重复计数器等功能。
STM32F103ZET6的通用定时器是一个通过可编程预分频器驱动的16位自动装载计数器构成。使用定时器预分频器和RCC时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。
这里介绍一下对于定时器的个人理解。定时器的定时原理实际可以理解为按照固定的频率数数。按照固定频率就说明定时器一定要有输入时钟。比如输入为一个1KHz的时钟,那么数一个数的时间就是1ms。另外,数数也不是无限地数,数值有一个上限。可以规定是从0开始数到上限值,还是从上限值数到0。而且每次数到头,需要重新开始。比如,需要控制灯亮200ms。那么只需要在点亮LED之后,等到数到200时熄灭即可。当数到上限值或者数到0时,重新开始数。
二、定时器有什么用
定时器有许多用途,以通用定时器为例。它可以测量输入信号的脉冲宽度,产生PWM波。此外定时器也可以用于触发ADC采集,按键检测等方面。
中文参考手册介绍如下
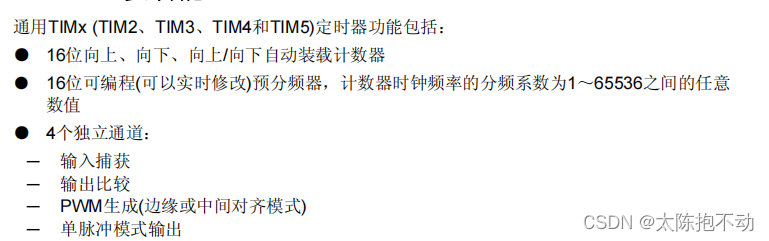
三、通用定时器详细介绍
速成选手可以线跳过这一部分,直接看下面,后来再返回来仔细看。
3.1 时钟来源
根据中文参考手册,通用定时器的时钟来源有四个。
- 内部CK_INT
- 外部触发时钟输入TIMx_ETR(外部时钟模式2)
- 内部触发输入(ITRx):使用一个定时器作为另一个定时器的预分频器
- 外部引脚输入(外部时钟模式1)

通过配置TIMx_SMCR寄存器来选择,关于寄存器这里就不再详细介绍了,大家可以去看中文参考手册。
根据中文参考手册关于时钟的介绍,通用定时器挂接在APB1总线。对于APB1总线的时钟如下

如果APB1的预分频系数为1,那么通用定时器的输入时钟频率为36MHz,否则为72MHz。但是通常APB1总线的预分频系数我们不会设置成1,所以通用定时器的时钟频率为72MHz。
3.2 预分频器,计数器,自动重装载寄存器

3.2.1 预分频器
预分频器是对时钟进行分频,范围是1~65536。比如通用定时器输入时钟频率为72MHz,此时,将预分频值设置为72,那么最终计数时的时钟频率为72MHz / 72 = 1MHz。
3.2.2 计数器
计数器就是用来计数的,计数值取值范围是0~65535。有三种计数方式:向上计数,向下计数,中央对齐模式(向上/向下计数)。
在向上计数模式中,计数器从0计数到自动加载值(TIMx_ARR计数器的内容),然后重新从0开始计数并且产生一个计数器溢出事件。
在向下计数模式中,计数器从自动装入的值(TIMx_ARR计数器的值)开始向下计数到0,然后从自动装入的值重新开始并且产生一个计数器向下溢出事件。
在中央对齐模式,计数器从0开始计数到自动加载的值(TIMx_ARR寄存器)−1,产生一个计数器溢出事件,然后向下计数到1并且产生一个计数器下溢事件;然后再从0开始重新计数。
3.2.3 自动重装载寄存器
比如,选择向下计数模式,初始值为2000。当计数到0时,会再次从2000开始向下计数。这就叫重装载。但是实际起作用的并不是这里的自动重装载寄存器,而是影子寄存器。关于影子寄存器这里就不再做介绍了,大家可以自行了解。
3.3 触发控制器
从图中的右上角可以注意到,有一个触发控制器。它可以用来触发一些外设,比如触发ADC采集,也可以用来给其他定时器提供时钟。
四、PWM
4.1 什么是PWM
PWM(脉冲宽度调制),它是一种利用微处理器的数字输出来对模拟电路进行控制的技术,也可以理解为是对模拟信号电平进行数字编码的方法。PWM可被应用于电机驱动,调光,通信等方面。
4.2 什么是占空比
一个PWM是有固定频率的,也就意味着周期一定,一个周期内有效电平持续时间占整个周期的比例可以称为占空比。比如一个周期100ms,其中50ms持续为有效电平,那么占空比就是50%。正是通过调节占空比,来调节电机转速,或者用不同占空比代表不同信号,用于通信。
4.3 STM32F1 PWM介绍
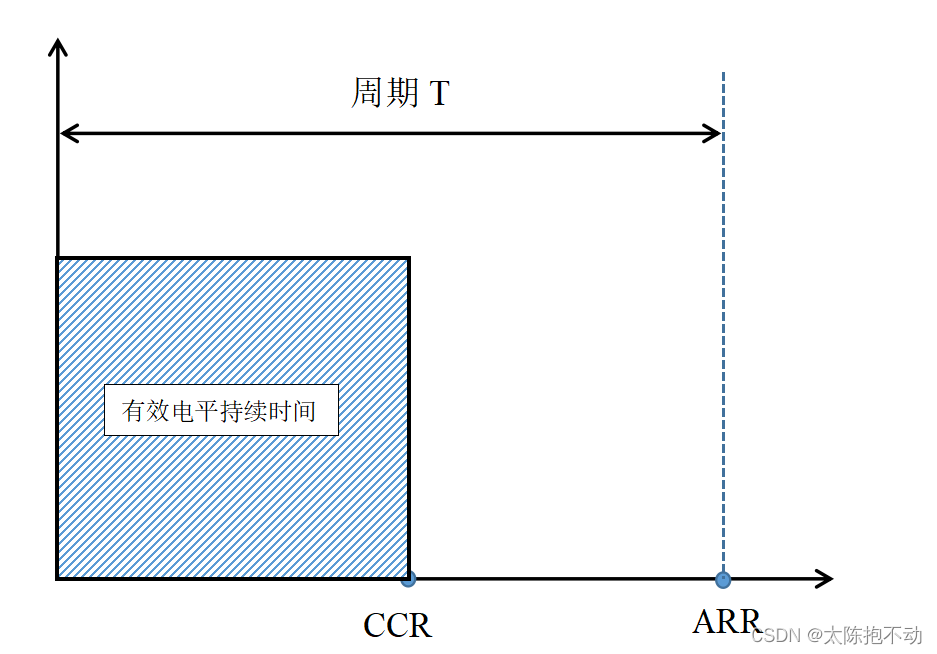
STM32F1系列单片机,除了基本定时器TIM6和TIM7外,都可以产生PWM输出。其中高级定时器TIM1和TIM8可以同时产生高达7路PWM输出。PWM输出其实就是对外输出占空比可调的方波,信号频率由自动重装载寄存器ARR的值决定,占空比由比较寄存器CCR的值决定。假设高电平为有效电平,见下图。ARR决定了周期(频率),CCR调节占空比。
根据中文参考手册介绍,STM32F1的PWM比较输出模式共有8种。脉冲宽度调制模式可以产生一个由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的信号。在TIMx_CCMRx寄存器中的OCxM位写入’110’(PWM模式1)或’111’(PWM模式2),能够独立地设置每个OCx输出通道产生一路PWM。有关寄存器的内容,这里就不不再做详细介绍。
这里介绍一下8种输出模式中比较常用的两种PWM输出模式,PWM1和PWM2。其实这两种输出模式差别不大,只不过输出电平的极性不同。
| 模式 | 计数器CNT计数方式 | 说明 |
|---|---|---|
| PWM1 | 递增 | CNT < CCR,通道输出有效电平,否则输出无效电平 |
| PWM1 | 递减 | CNT > CCR,通道输出无效电平,否则输出有效电平 |
| PWM2 | 递增 | CNT < CCR,通道输出无效电平,否则输出有效电平 |
| PWM2 | 递减 | CNT > CCR,通道输出有效电平,否则输出无效电平 |
4.4 PWM频率计算
频率 = (主时钟频率(72MHz) / (分频系数 + 1)) / 自动重装载值(单位为Hz)
五、通用定时器输出引脚
| 通道1 | 通道2 | 通道3 | 通道4 | |
|---|---|---|---|---|
| TIM2 | PA0 | PA1 | PA2 | PA3 |
| TIM3 | PA6 | PA7 | PB0 | PB1 |
| TIM4 | PB6 | PB7 | PB8 | PB9 |
| TIM5 | PA0 | PA1 | PA2 | PA3 |
六、实战项目
这里以一个经典项目——呼吸灯,来一起熟悉一下定时器的配置和使用,要求灭—>亮—>灭,时间为2.5s。
6.1 呼吸灯
呼吸灯是指灯能够像人的呼吸一样,实现由暗到亮或由亮到暗的变化,通常用于消息提示功能,或者作为系统正在运行的提示。之前一篇博文介绍过三种呼吸灯的实现方式,这里针对普中核心板,来介绍一下如果实现呼吸灯。
6.2 实现思路
这里用两种方法来实现一下呼吸灯。分别是定时器的溢出中断和PWM。其实第一种和PWM类似,我非就是控制LED点亮时间。
- 定时器中断实现
配置好预分频系数和重装载值,使每0.25ms进入一次定时器中断,记录进入中断次数(count)。当进入次数满100次之后(2.5ms),控制LED点亮的变量(t)值加1。主函数的while(1)轮询中,如果t小于等于count的时候,LED点亮,否则LED熄灭。t的值累计100加次后(2.5s),开始递减,LED由亮到灭。控制t是递增还是递减的是一个标志位(flag),初始值为0,具体可以看程序设计。 - PWM
利用PWM实现呼吸灯就更加简单了,只需要不断调节占空比即可。
6.3 定时器配置
配置通用定时器,有以下步骤
- 使能定时器时钟
- 初始化定时器参数,包括自动重装载值,分频系数,计数方式等
- 设置中断类型,并使能
- 设置中断优先级,使能定时器中断通道
- 开启定时器
- 编写定时器中断服务函数
需要注意的是,配置预分频系数时,比如设置为6,实际是6 + 1。
定时时间T = 自动重装载值 * ((预分频系数 + 1) / 主时钟频率)。主时钟频率为72MHz。
(为了避免误导,这里写的主时钟频率为72MHz是APB1总线分频系数不是1的前提下。)
6.4 定时器中断实现呼吸灯
定时器配置程序如下,使用定时器2,控制LED1实现呼吸灯,由灭—>亮—>灭,时间为5秒。
/*
*==============================================================================
*函数名称:TIM2_Iint
*函数功能:初始化定时器2
*输入参数:per:自动重装载值;psc:预分频系数
*返回值:无
*备 注:无
*==============================================================================
*/
void TIM2_Iint (u16 per,u16 psc)
{
// 结构体定义
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); // 使能TIM2时钟
TIM_TimeBaseInitStructure.TIM_Period = per; // 自动装载值
TIM_TimeBaseInitStructure.TIM_Prescaler = psc; // 分频系数
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 不分频
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; // 设置向上计数模式
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); // 开启定时器中断
TIM_ClearITPendingBit(TIM2,TIM_IT_Update); // 使能更新中断
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; // 定时器中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2; // 抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; // 子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // IRQ通道使能
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2,ENABLE); // 使能定时器
}
初始化时定时器的程序如下
TIM2_Iint(250,71); // TIM2初始化
预分频系数为71 + 1 = 72,计数到250进入一次中断,也就是0.25ms进入一次中断。累计进入100次(25ms)中断开始调节一点LED的亮度。由灭到亮,累计调节100次(2.5s)。主函数和中断服务函数如下
u8 gTimIrqCunt = 0; // 进入中断次数计数变量
u8 gLedLightCtrl = 0; // LED亮度控制变量
u8 gLedFlag = 0; // LED亮灭控制标志位,0:灭—>亮;1:亮—>灭
int main(void)
{
Med_Mcu_Iint(); // 系统初始化
while(1)
{
if (gLedLightCtrl <= gTimIrqCunt)
{
Med_Led_StateCtrl (LED1,LED_OFF); // 熄灭LED1
}
if (gLedLightCtrl > gTimIrqCunt)
{
Med_Led_StateCtrl (LED1,LED_ON); // 熄灭LED1
}
}
}
// TIM2中断服务函数
void TIM2_IRQHandler(void) // TIM2中断
{
// 产生更新中断
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{
gTimIrqCunt = gTimIrqCunt + 1; // 进入中断次数加1
// 累计进入100次中断,且是由灭到亮
if (gTimIrqCunt >= 100 && gLedFlag < 100)
{
gTimIrqCunt = 0; // 清零进入中断计数变量
gLedLightCtrl = gLedLightCtrl + 1; // LED亮度控制变量加1
gLedFlag = gLedFlag + 1; // LED亮灭控制标志位加1
}
// 累计进入100次中断,且是由亮到灭
if (gTimIrqCunt >= 100 && gLedFlag >= 100)
{
gTimIrqCunt = 0; // 清零进入中断计数变量
gLedLightCtrl = gLedLightCtrl - 1; // LED亮度控制变量加1
gLedFlag = gLedFlag + 1; // LED亮灭控制标志位加1
}
// 一个亮灭周期结束
if (gLedFlag >= 200)
{
gLedFlag = 0; // 清零LED亮灭控制标志位
}
}
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); // 清除TIM2更新中断标志
}
6.5 使用PWM实现呼吸灯
PWM配置步骤
- 使能定时器以及GPIO时钟,设置引脚复用映射
- 初始化定时器参数,包括自动重装载值,分频系数,计数方式等
- 初始化PWM输出参数,包括PWM模式,输出极性,使能等
- 开启定时器
- 修改CCRx的值来修改占空比
- 使能TIMx在CCRx上的预装载寄存器
- 使能TIMx在ARR上的预装载寄存器允许位
TIM3的通道1配置程序如下
/*
*==============================================================================
*函数名称:TIM3_CH1_PWM_Init
*函数功能:初始化定时器3的PWM通道1
*输入参数:per:自动重装载值;psc:预分频系数
*返回值:无
*备 注:无
*==============================================================================
*/
void TIM3_CH1_PWM_Init (u16 per,u16 psc)
{
// 结构体定义
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
// 初始化GPIO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_Init(GPIOC,&GPIO_InitStructure);
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3,ENABLE); // 改变指定管脚的映射
// 初始化定时器参数
TIM_TimeBaseInitStructure.TIM_Period = per; // 自动装载值
TIM_TimeBaseInitStructure.TIM_Prescaler = psc; // 分频系数
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 设置向上计数模式
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
// 初始化PWM参数
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 比较输出模式
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; // 输出极性
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 输出使能
TIM_OC1Init(TIM3,&TIM_OCInitStructure); // 输出比较通道1初始化
TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Enable); // 使能TIMx在 CCR1 上的预装载寄存器
TIM_ARRPreloadConfig(TIM3,ENABLE); // 使能预装载寄存器
TIM_Cmd(TIM3,ENABLE); // 使能定时器
}
实现呼吸灯时,只需要在main函数中不断调整占空比即可,调整占空比的函数为
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1)
这里main函数就不在列出来了。需要注意的是,设置的CCR的值,不能超过自动重装载值 - 1。
七、拓展
之前介绍按键检测时,介绍过检测按键长短按的方法。当时比较简单粗暴,这里介绍另一种,使用定时器来判断按键WK UP的长短按。假设规定,按下时间在10ms~500ms之间为短按,按下时间大于等于1s,为长按。短按LED1点亮,长按LED1熄灭。之前是利用delay来实现时间控制,现在改用定时器实现时间控制,但是基本思路都是相同的。
关于按键部分的程序这里就不再做介绍了。首先配置定时器,10ms进入一次更新中断,预分频系数为72,自动重装载值为10000。使用TIM2,定时器配置程序和上面一样,初始化程序如下填写
TIM2_Iint(10000,71); // TIM2初始化
main函数以及中断服务函数如下
u32 gKeyDownTimeCunt = 0; // 按键按下时间计数变量
u8 gKeyLongFlag = 0; // 按键长按标志位
u8 gKeyShotFlag = 0; // 按键短按标志位
int main(void)
{
Med_Mcu_Iint(); // 系统初始化
while(1)
{
// 短按
if (gKeyShotFlag == 1)
{
Med_Led_StateCtrl (LED1,LED_ON); // 点亮LED1
gKeyShotFlag = 0; // 清除短按标志位
}
// 长按
if (gKeyLongFlag == 1)
{
Med_Led_StateCtrl (LED1,LED_OFF); // 熄灭LED1
gKeyLongFlag = 0; // 清除长按标志位
}
}
}
// TIM2中断服务函数
void TIM2_IRQHandler(void) // TIM2中断
{
// 产生更新中断
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{
if (KEY_UP == 1)
{
gKeyDownTimeCunt = gKeyDownTimeCunt + 1; // 时间计数变量加1
}
// 松开后
else
{
// 短按
if (1 <= gKeyDownTimeCunt && gKeyDownTimeCunt <= 50)
{
gKeyDownTimeCunt = 0; // 清除时间计数变量
gKeyShotFlag = 1; // 短按标志位置1
}
// 长按
if (gKeyDownTimeCunt >= 100)
{
gKeyDownTimeCunt = 0; // 清除时间计数变量
gKeyLongFlag = 1; // 长按标志位置1
}
}
}
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); // 清除TIM2更新中断标志
}