在计算流线,拉格朗日拟序结构等流场后处理时,我们常常需要计算无质量的粒子在流场中迁移时的轨迹,无质量意味着粒子的速度为流场当地的速度。此时,求解粒子的位移这个问题是一个非常简单的常微分方程问题。
假设流场中存在
i
个粒子,那么对于每个粒子有
v
i
=
x
i
初始条件为:
x
i
(
t
0
)
假设流场中存在i个粒子,那么对于每个粒子有 \\v_i = x_i \\初始条件为:x_i(t_0)
假设流场中存在i个粒子,那么对于每个粒子有vi=xi初始条件为:xi(t0)
1、欧拉向前差分
欧拉向前差分是最简单的方法,其主要步骤为:
x
i
t
+
d
t
=
x
i
+
v
i
t
∗
d
t
v
i
t
为
t
时刻在
x
i
处的流场速度
\\x_{i}^{t+dt} = x_{i}+v_{i}^{t}*dt \\ v_{i}^{t}为t时刻在x_i处的流场速度
xit+dt=xi+vit∗dtvit为t时刻在xi处的流场速度
显然,该方法的精度取决于时间步长,时间步长越大,误差越大。
该方法需要注意几个事项:
(1)流场插值处理
我们实现知道的流场数据是时间和空间离散的,对于任意一个时刻,我们只知道空间离散点处的流场速度,加入粒子的位置恰好不在这些点上,我们就需要通过插值得到其速度。
matlab提供了这样的插值函数,interp2()。
假设我们现在已知流场的空间离散点矩阵x_f;y_f以及速度U,V;
我们想通过插值获得,ftle_x,ftle_y处粒子的速度ux,uy
ux = interp2(x_f,y_f,U,ftle_x,ftle_y,'linear');
uy = interp2(x_f,y_f,V,ftle_x,ftle_y,'linear');
%%上面的代码中ftle_x,ftle_y可以是矩阵形式,这样得到的速度ux,uy也是矩阵
那么接下来粒子迁移就十分简单了
for t = f_time:dt:(T+f_time)
%获取t时刻的速度数据
U = reshape(vel(1:Nx*Ny,t),Ny,Nx);
V = reshape(vel(Nx*Ny+1:end,t),Ny,Nx);
%%计算粒子迁移t-->t+dt
ux = interp2(x_f,y_f,U,ftle_x,ftle_y,'linear');
uy = interp2(x_f,y_f,V,ftle_x,ftle_y,'linear');
X = ftle_x + dt*tstep*ux;
Y = ftle_y + dt*tstep*uy;
ftle_x=X;
ftle_y=Y;
end
另外,好像对于这个问题不能用梯型方法?梯型方法的步骤如下:
y
n
+
1
=
y
n
+
h
2
(
f
(
x
n
,
y
n
)
+
f
(
x
n
+
1
,
y
n
+
1
)
y_{n+1}=y_n+\frac{h}{2}\bigl(f\bigl(x_n,y_n\bigr)+f\bigl(x_{n+1},y_{n+1})
yn+1=yn+2h(f(xn,yn)+f(xn+1,yn+1)
主要问题在于我没法知道下一步粒子在哪,即这里的x(n+1),y(n+1),因为我就是在求这个东西?
暂时没想明白怎么用梯型方法。
2、龙格-库塔法
这个就比较玄学了,这个我也没弄清原理,只是知道matlab里有这个函数可以用,并且还不错。
由于龙格-库塔法需要两个时间步中间的时刻,我们不仅需要空间插值,还需要时间插值。
插值的方法也很简单,matlab提供了相应的函数
(1)首先我们需要获得粒子的时间,空间离散结果
for k = 1:size(vel,2)
XX(:,:,k) = X0;
YY(:,:,k) = Y0;%%这里是给定了每个时刻的离散空间位置,我们采用欧拉法求解流场,所以离散点是固定的
u(:,:,k) = reshape(vel(1:ny*nx,k),[ny nx]);
v(:,:,k) = reshape(vel(ny*nx+1:end,k),[ny nx]);
TT(:,:,k) = t(k)*ones(ny,nx);%%这里存储着每个粒子的时间信息,因为全场内每个粒子的时间是相同的,所以用了ones()函数
end
(2)对其进行转置(该步骤不是必要的)
%% 该部分的操作相当于对一个三维矩阵的前两维进行转置
P = [2 1 3];
Xprime = permute(XX,P);
Yprime = permute(YY,P);
Tprime = permute(TT,P);
Uprime = permute(u,P);
Vprime = permute(v,P);
(3)时空间插值
u_interp = griddedInterpolant(Xprime,Yprime,Tprime,Uprime,'linear');
v_interp = griddedInterpolant(Xprime,Yprime,Tprime,Vprime,'linear');
(4)ode45()函数求解
[t, X_out] = ode45(@velocity_interp_func,intspan(tspan(k),T),[X0(i,j),Y0(i,j)]);
%% 这里ode45函数需要输入三个参数
@velocity_interp_func这是句柄,包含着方程的信息
intspan(tspan(k),T) 这个是从某个时刻计算到某个时刻
这里具体含义是从tspan(k)时刻推进到tspan(k)+T时刻
[X0(i,j),Y0(i,j)]是初始场
根据这个函数就可以计算处初始位置在[X0(i,j),Y0(i,j)],初始时刻为tspan(k),经过T时间的运动后,最终的位置X_out。X_out包含了每个时刻对应的粒子位置,t即是这些时刻的时间信息。
但是我们只需要最后一个时刻的信息,因此
X_adv(i,j) = X_out(end,1);
Y_adv(i,j) = X_out(end,2);
需要注意的是,只是计算单独一个粒子的轨迹,要想计算全场的粒子,需要对其进行遍历,然鹅经过实操发现,这个过程还是很耗时的。
这个方法的具体运行原理我还没有搞明白,因为最简单的梯型法现在还没想清楚,所以仅放在这里。
注意:上面两种方法都是利用离散数据得到粒子迁移的,这里我们通过解析解获得时间间隔为0.1下的0:16s时刻共161个流场数据,流场网格划分为均匀划分,nx =201;ny = 101;
流场设置为double_gyre流场
我们计算的问题是:
流场初始0时刻布置201*101个粒子,计算10s时刻时这些粒子的位置。
3、对照组
为了方便对比上面两种方法的精度,我设置了一组对照组,由于流场设置为double_gyre流场,这个流场是存在解析解的,因此我们可以获得任意时刻,任意位置处的精确速度信息。
通过设置时间步长非常小,并且采用欧拉向前推进,可以将这个方法得到的结果精度提升到很高。
我计算了两种精度的结果1、dt=0.01s,2、dt=0.001s
然后将上面两种方法得到的结果与该方法进行对比,从而得到两种方法的误差范围。
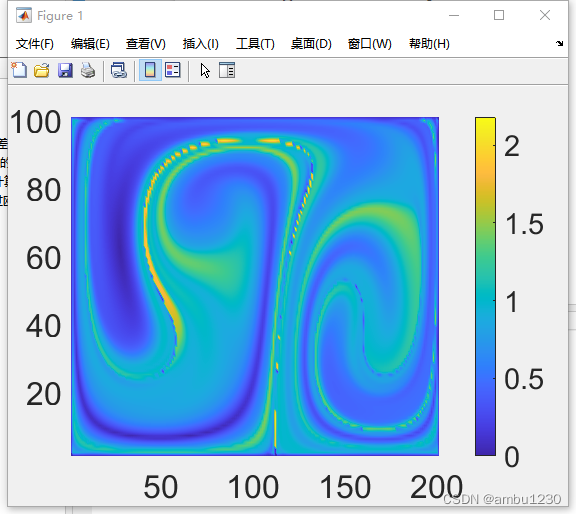
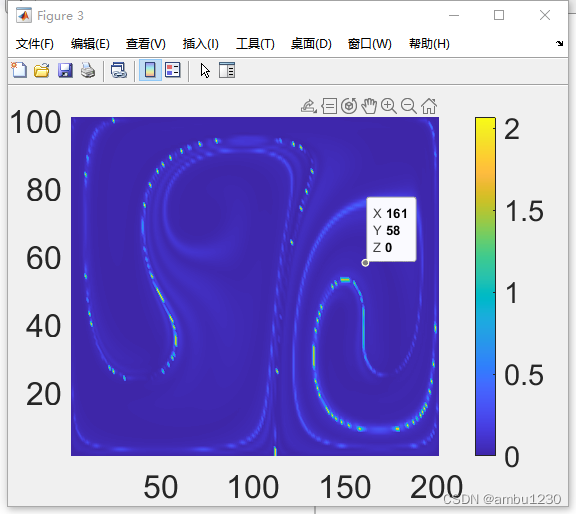
4、实验结果
figure(1)
dx = sigma_x - X_ana;
dy = sigma_y - Y_ana;
e_ds = sqrt(dx.^2+dy.^2);
pcolor(e_ds)
shading interp
figure(2)
dx = X_adv - X_ana;
dy = Y_adv - Y_ana;
o_ds = sqrt(dx.^2+dy.^2);
pcolor(o_ds)
shading interp
欧拉法与dt=0.01解析解对比,后者的时间精度是前者的十倍
结果如下:
ode45方法结果与dt=0.01解析方法对比
结果如下:
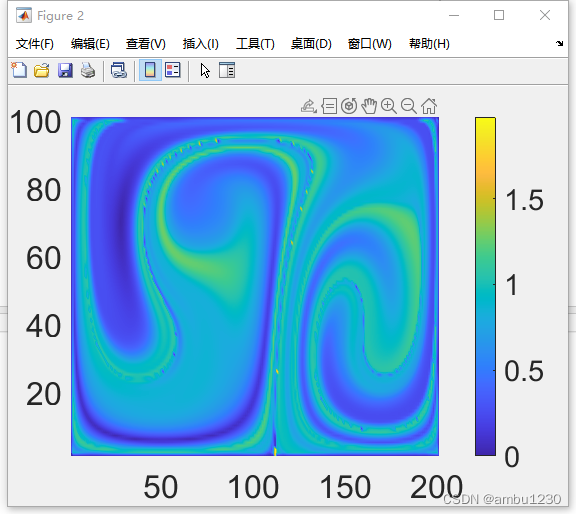
可以看出,欧拉方法的误差要大于ode45方法,但是其实差距不是很大。
我们对误差进行全场平均:
欧拉:0.71
ode45:0.67
误差最大值:
欧拉:2.18
ode45:1.97
这里其实误差还是蛮大的,因为流场范围才是2*1.
还有一个比较神奇的点是,这个误差云图很像ftle图,这是因为ftle图反应了粒子拉伸扭曲的程度,而恰好在这些位置处,误差非常敏感,比较有意思。
最后我们对比了dt=0.01和dt =0.001时解析方法之间的对比结果
其误差云图如下:
可以看出,dt=0.01时时间精度就已经很高了,与dt=0.001的结果很接近。
补充:总觉得上面的对比还是不够明显,于是又进行了几组测试
dt=0.02;dt=0.05
测试结果,这里仅对比误差平均值:
dt=0.05
欧拉:0.082
ode45:0.091
欧拉方法更接近dt=0.05
dt=0.02
欧拉:0.13
ode45:0.038
ode45方法更接近dt=0.02
可以看出ode45方法其实精度超过了dt=0.05时的解析方法。
对比到此结束,仍然需要指出。虽然平均误差看起来比较大,实际上这些是主要由所谓的FTLE场的脊位置处的粒子贡献的。大多数位置处的粒子误差水平还是比较小的。
下图左为欧拉,右为ode45,蓝色区域的误差还是比较小的。

欧拉方法的误差矩阵:

ode45方法的误差矩阵: