自动驾驶:2022 apollo day 观后感(二)
- TOPIC TWO:自动驾驶地图:Apollo的实践和思考(黄际洲)
- 地图需求升级
- 自动驾驶规划方向
- 轻成本,重体验
- 轻成本
- 重体验
- 安全:
- 舒适度
- 出行效率
- 新一代地图
注: ppt来自apollo day,结合ppt,记录一些自己的想法,欢迎批评指正!
TOPIC TWO:自动驾驶地图:Apollo的实践和思考(黄际洲)
地图需求升级
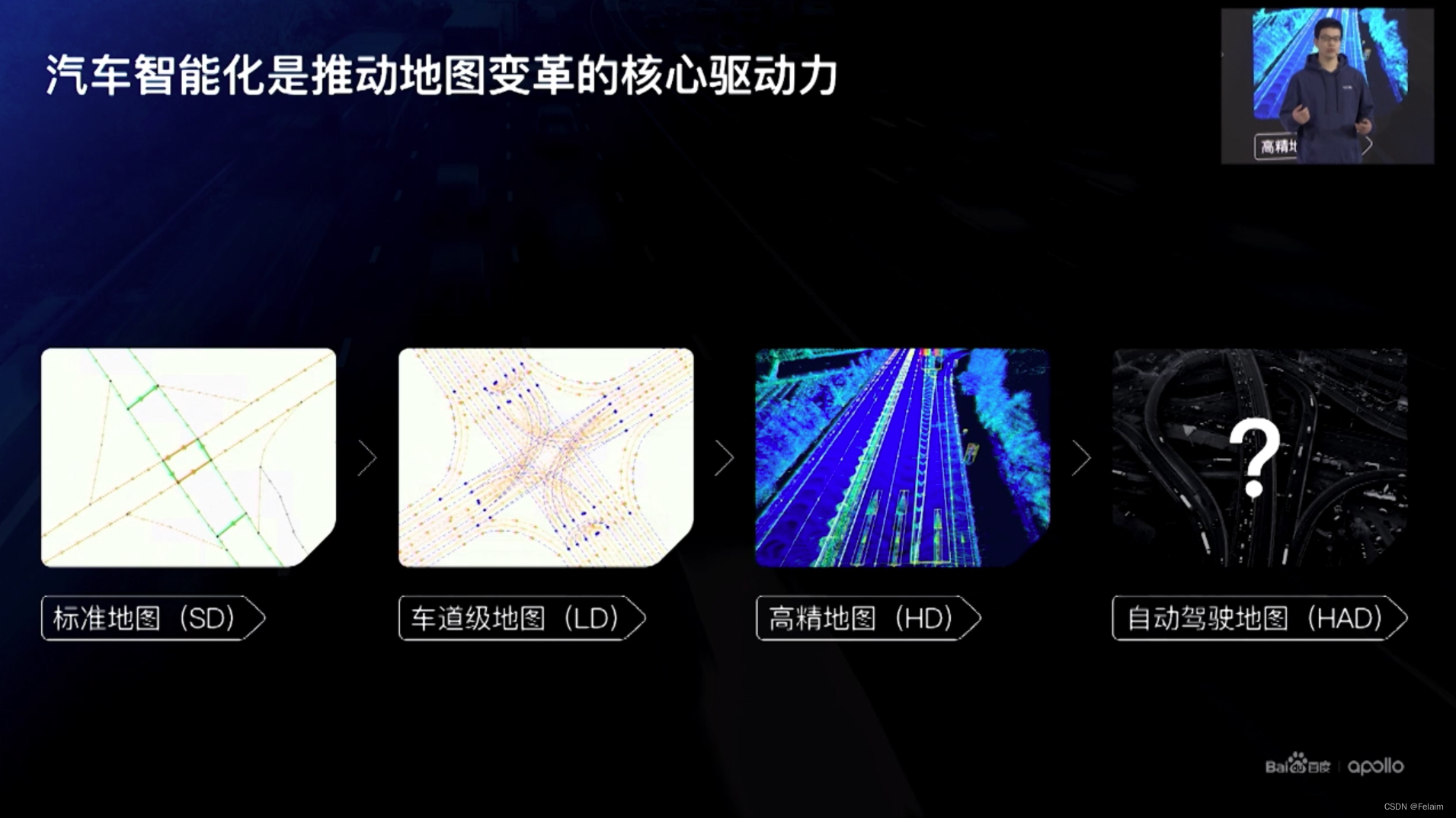
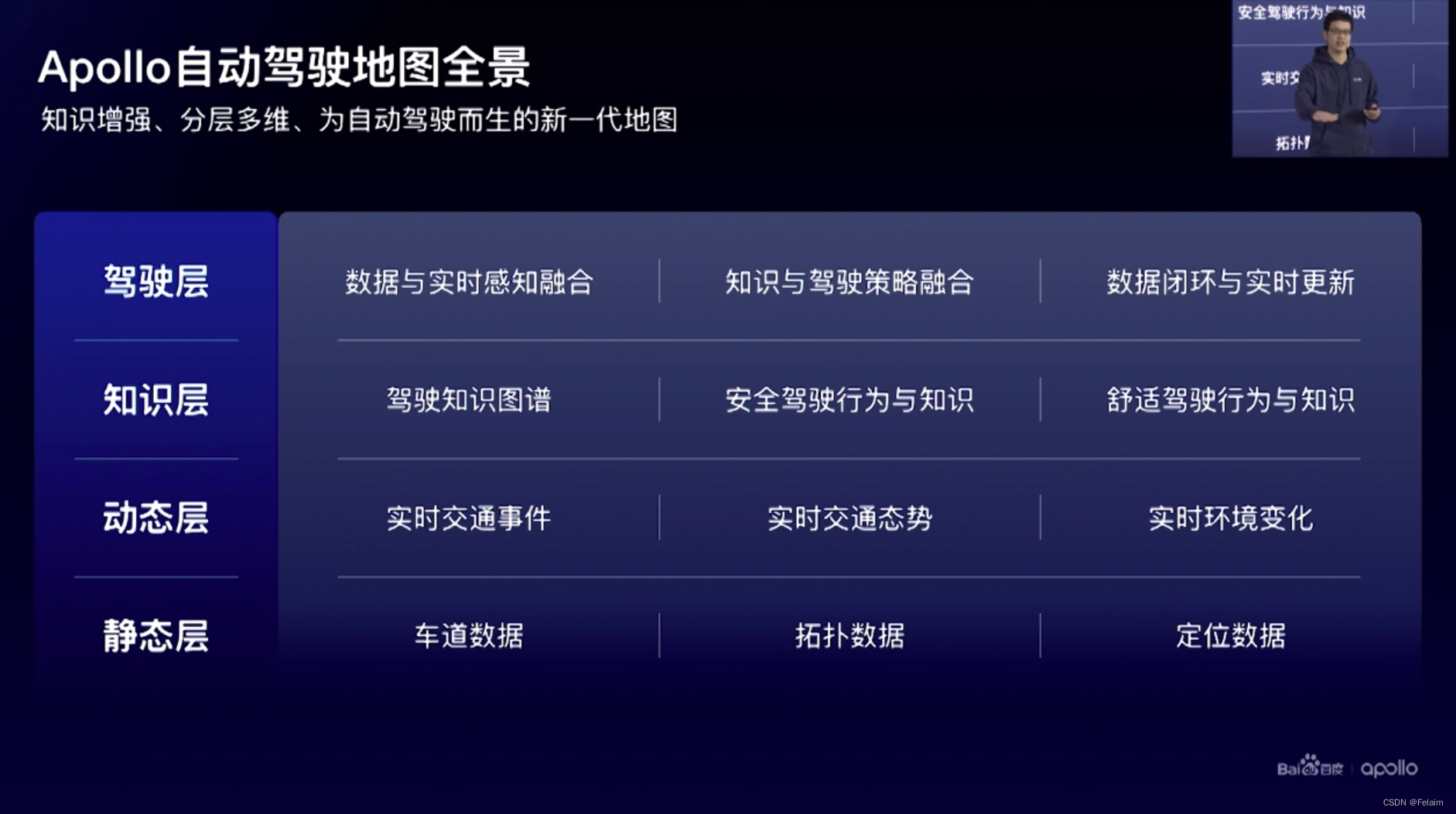
从标准地图(精度误差15m)-> 车道级地图(亚米级)-> 高精地图(厘米级)-> 自动驾驶地图(厘米级,维度更多,表达更丰富)
HD Map (high definition map)高分辨率地图
HAD Map(highly automated driving map)高度自动驾驶地图: “高精度”,“高动态”,“多维度”
自动驾驶规划方向
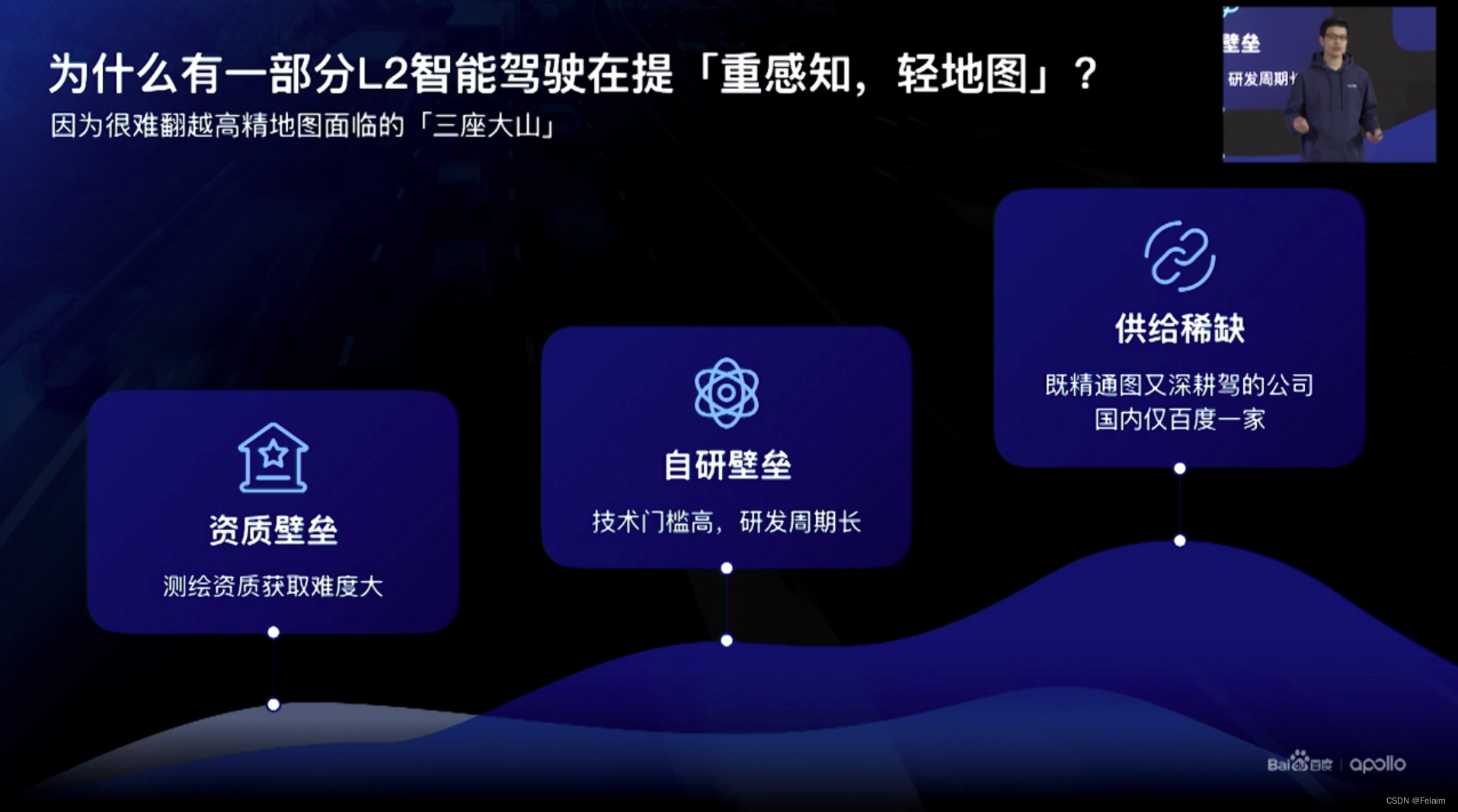
确实如演讲者所说,随着测绘资质申请的难度增加,不少自动驾驶公司在没有甲级资质的情况下,只能积极寻找其他的方案,通过技术升级,完成对应的自动驾驶技术的进一步开发。
轻成本,重体验
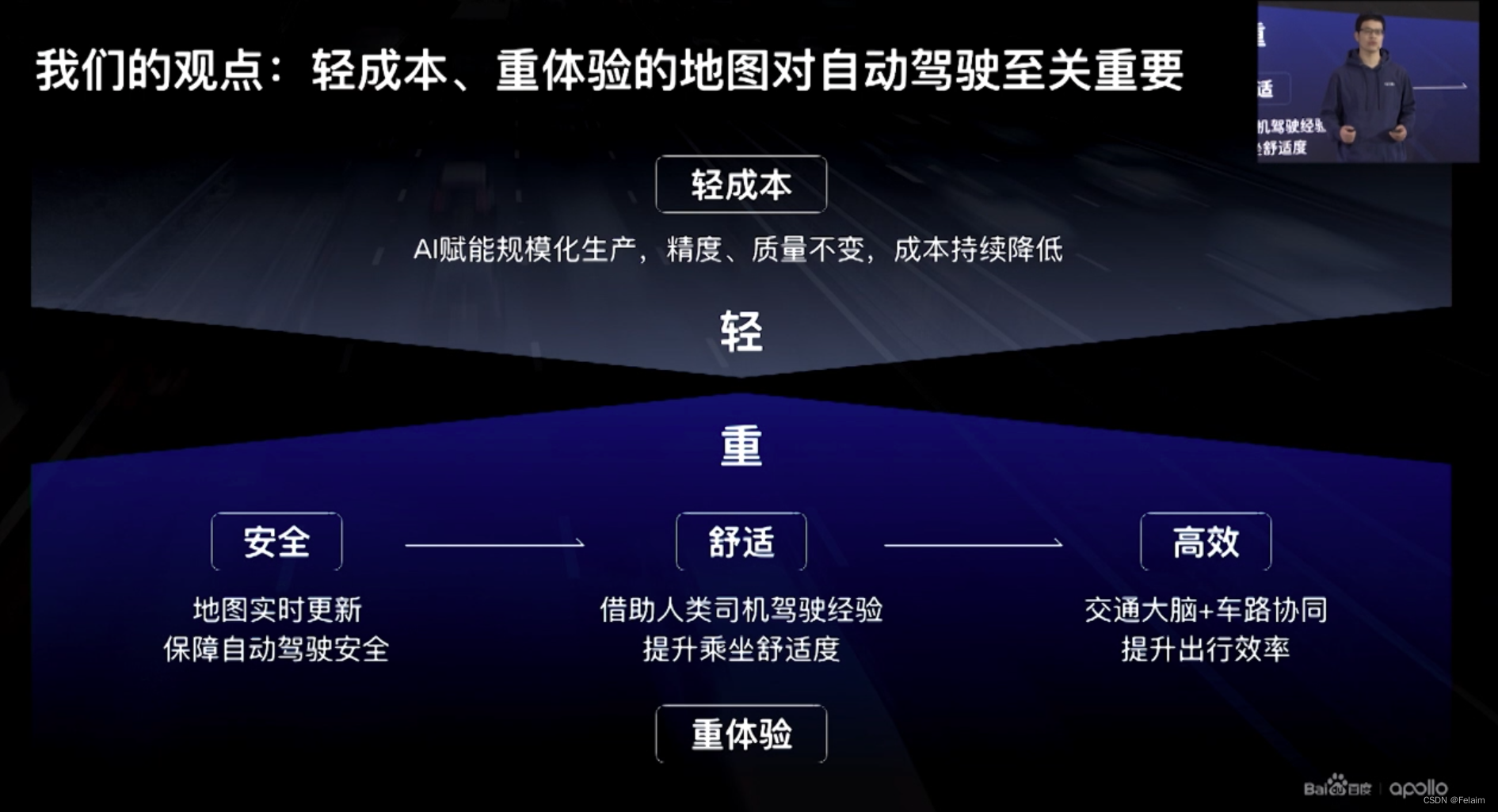
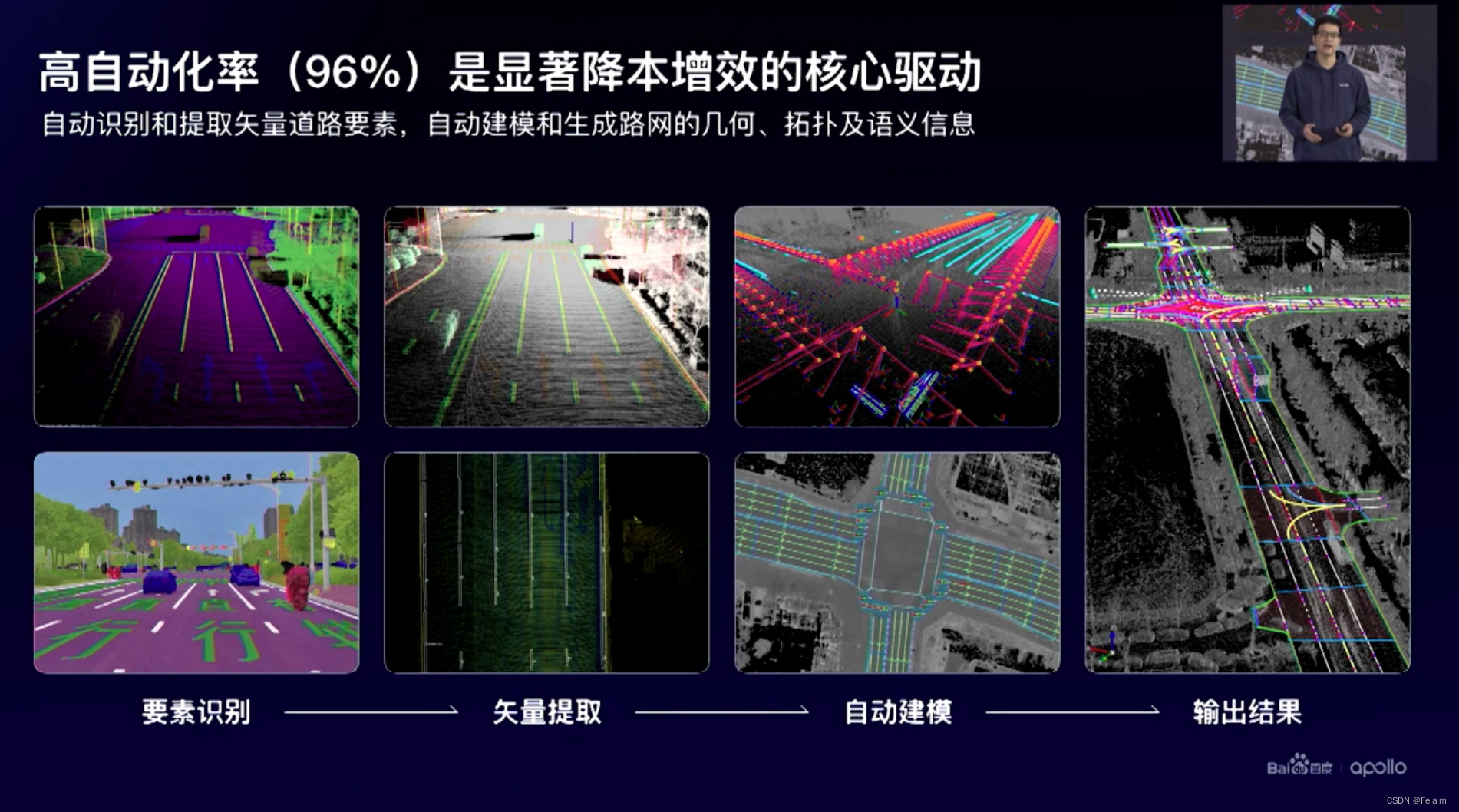
轻成本:提升高精地图的智能化生产能力,保证质量不变的情况下,降低成本
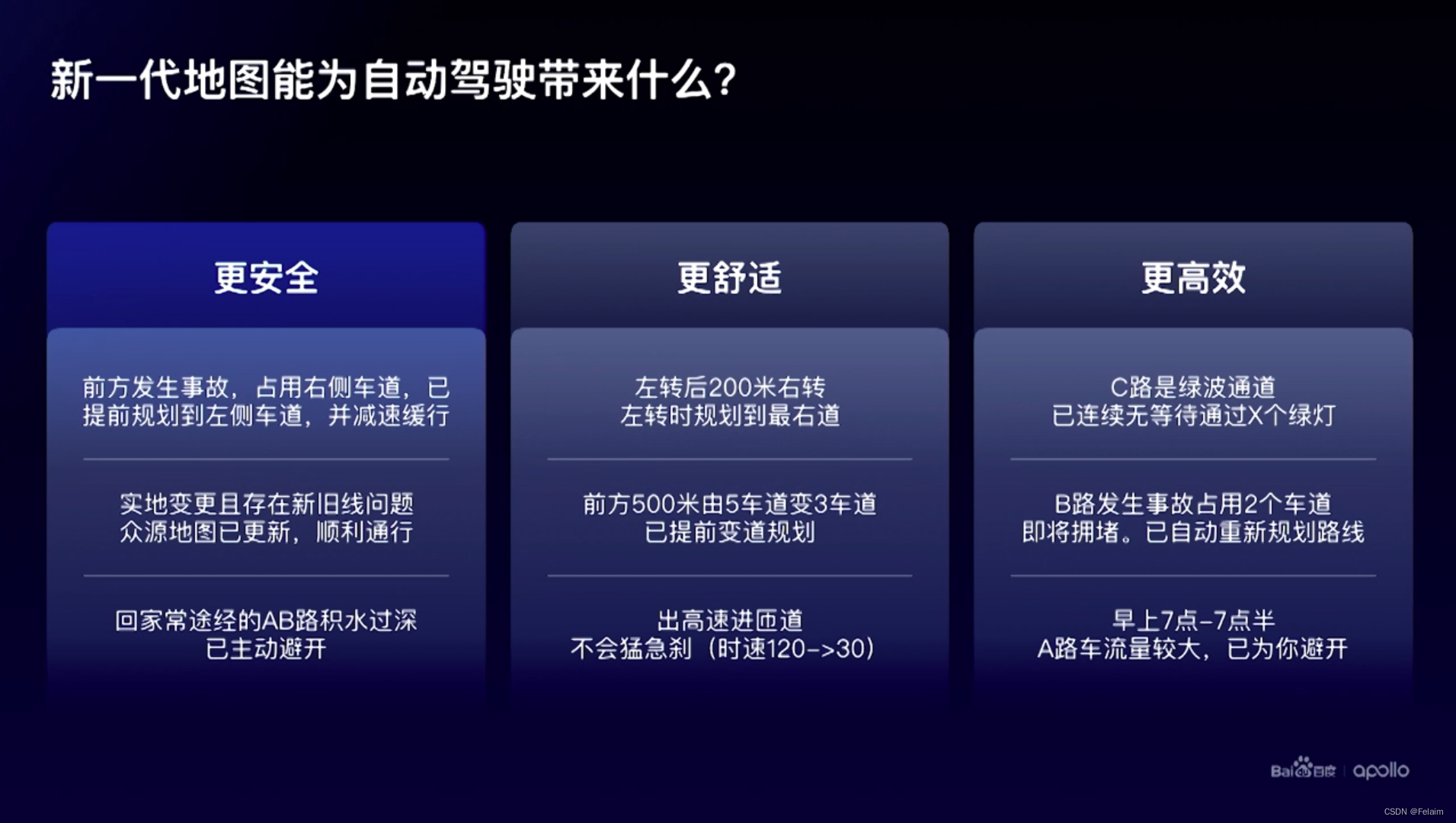
重体验:安全(地图鲜度),舒适(驾驶知识图谱),高效(车路协同,交通大脑)
轻成本
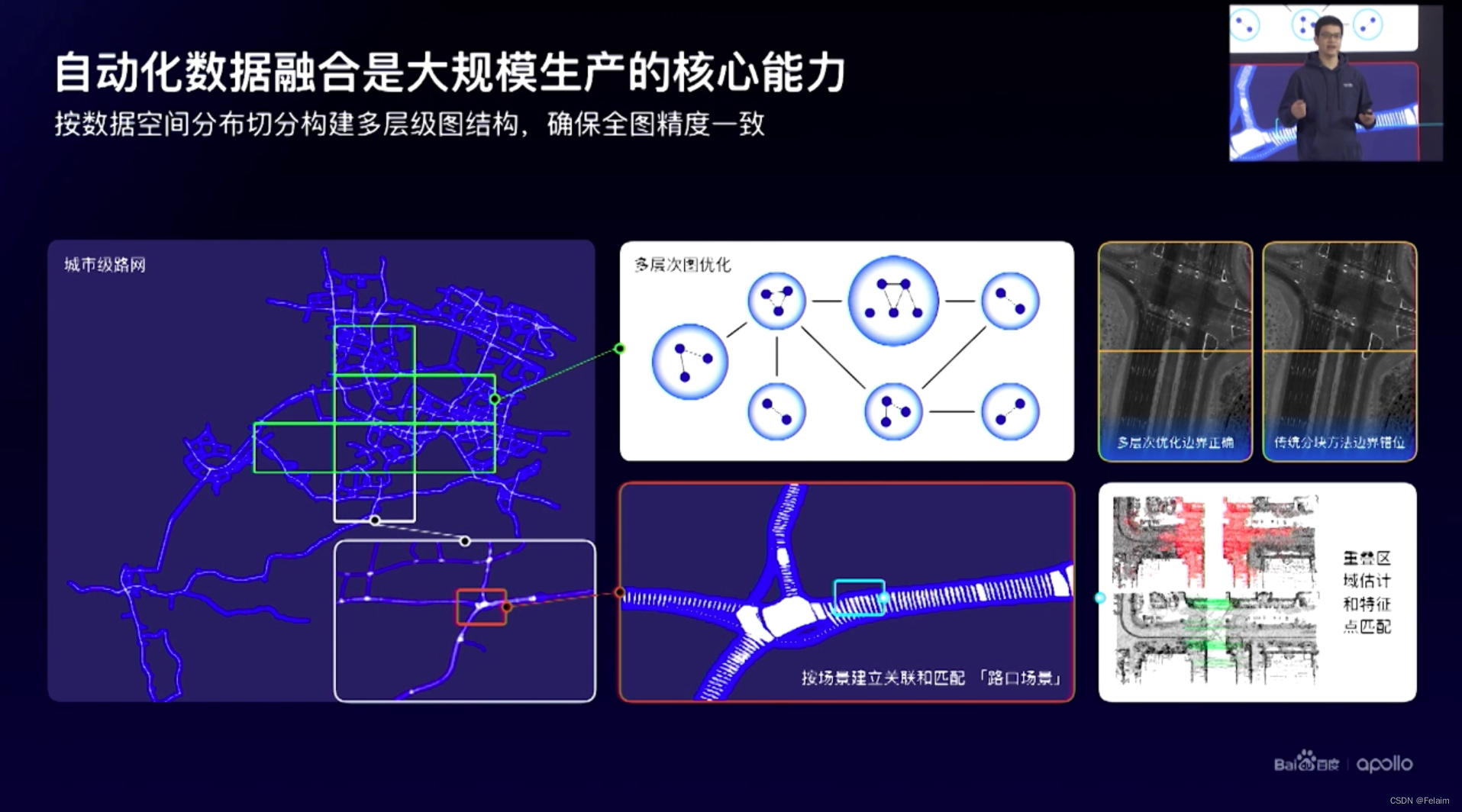
- 多层级的图优化
- 场景化的关联和匹配
- 重叠区域估计和特征点匹配
重体验
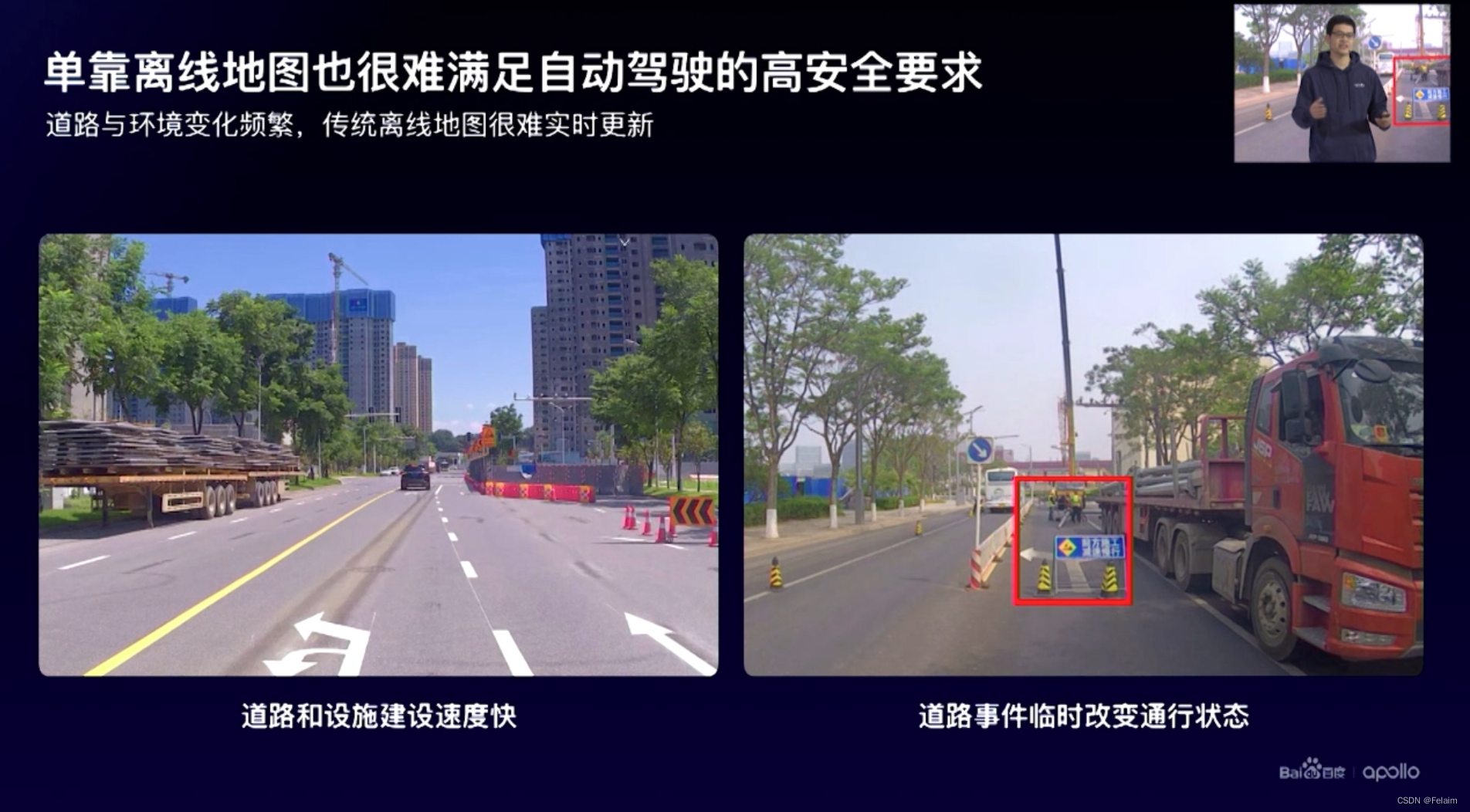
安全:
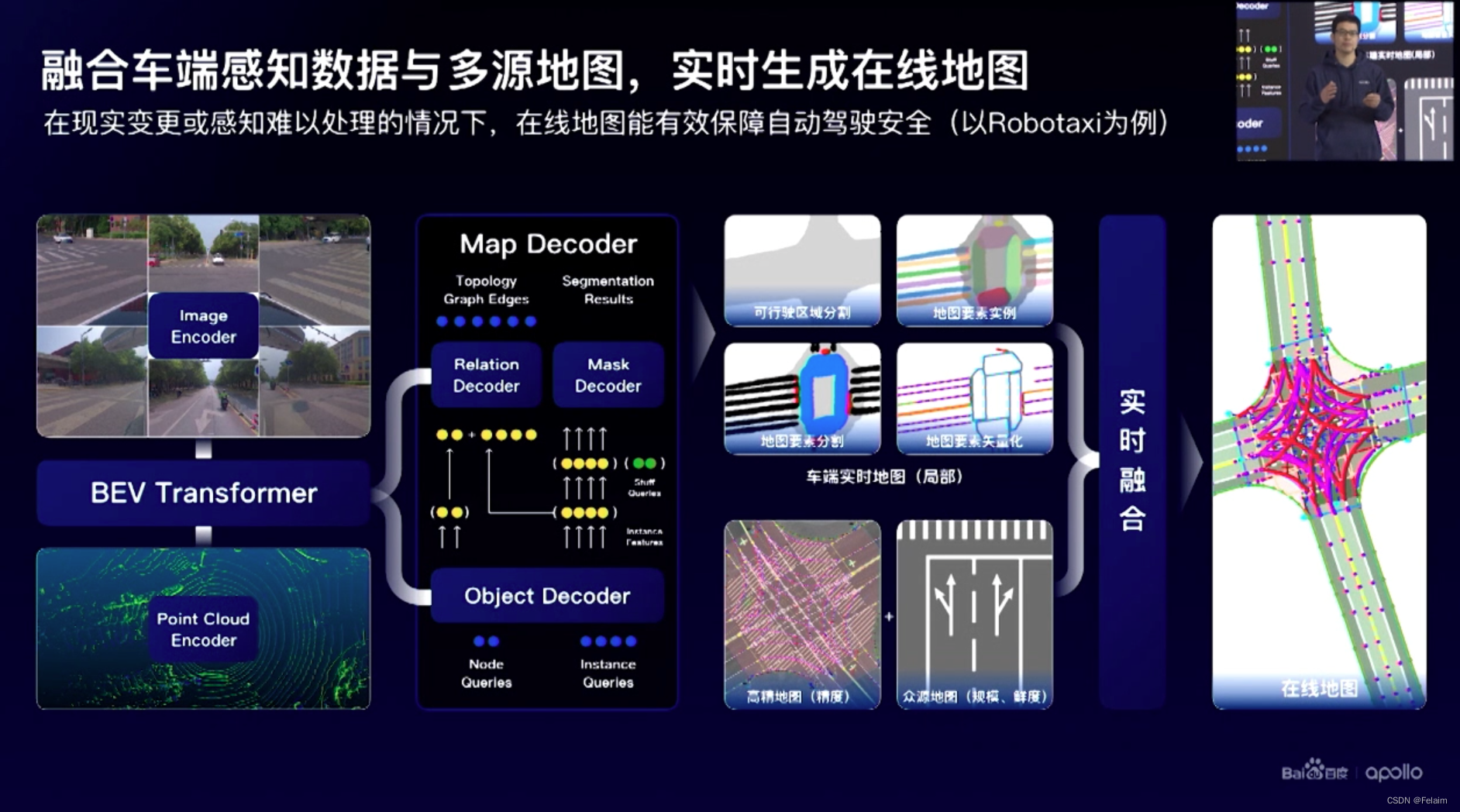
实时生成在线地图:把感知的数据,离线的地图等各种信息融合,提供最终的地图信息

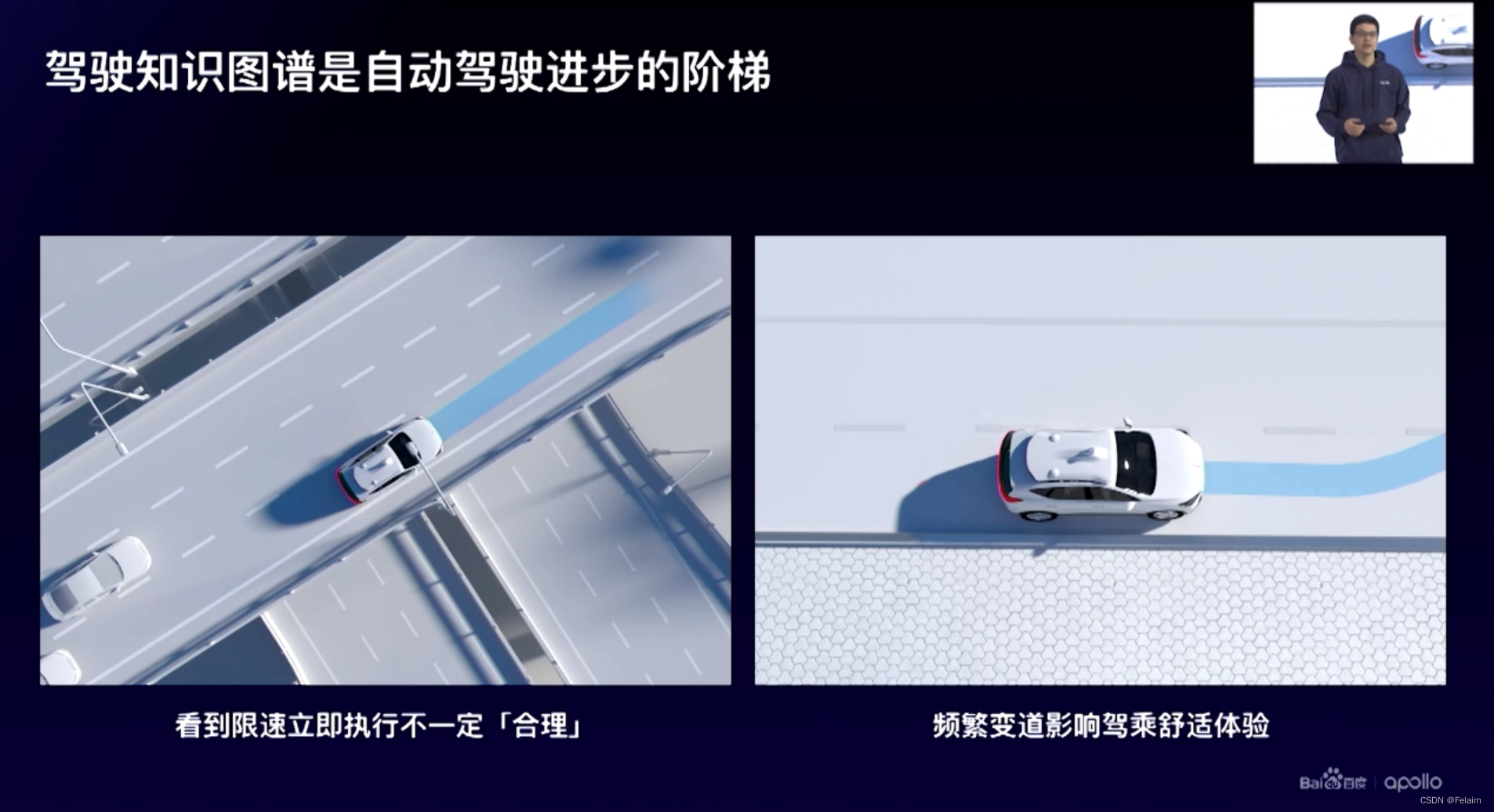
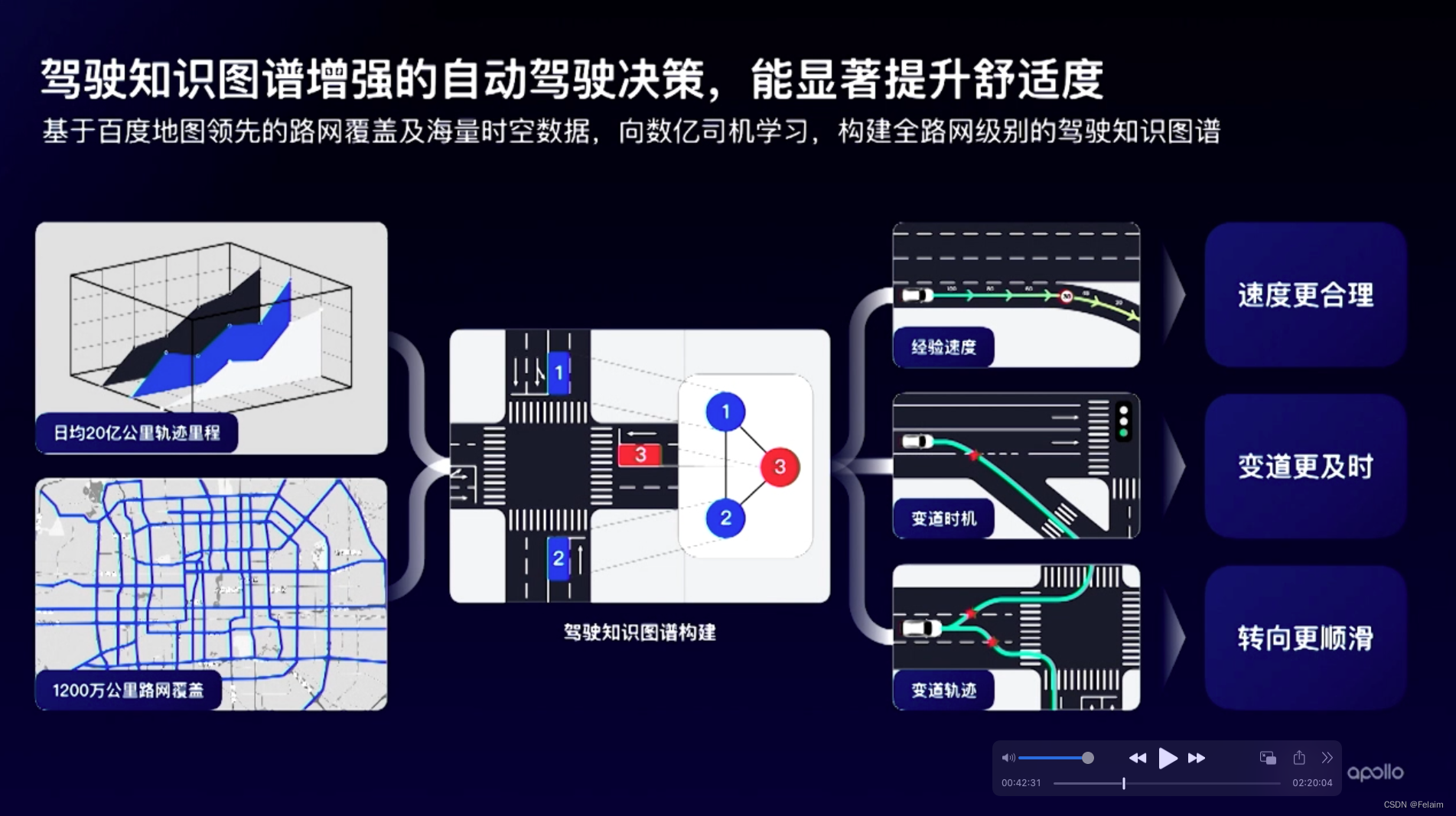
舒适度
出行效率
绿波出行
新一代地图