1 由深度纹理重构世界坐标
屏幕深度和法线纹理简介中对深度和法线纹理的来源、使用及推导过程进行了讲解,本文将介绍使用深度纹理重构世界坐标的方法,并使用重构后的世界坐标模拟激光雷达特效。
本文完整资源见→Unity3D激光雷达特效。
1)重构像素点世界坐标
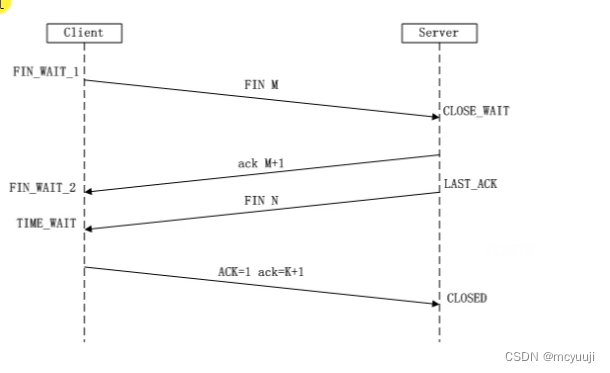
对于屏幕上的任意一点,它对应的世界坐标系中的点记为 P,对应的近裁剪平面上的点记为 Q,相机位置记为 O(坐标为 _WorldSpaceCameraPos),假设 P 点的深度为 depth(由 LinearEyeDepth 函数获取),相机到近平面的距离为 near,如下图所示。
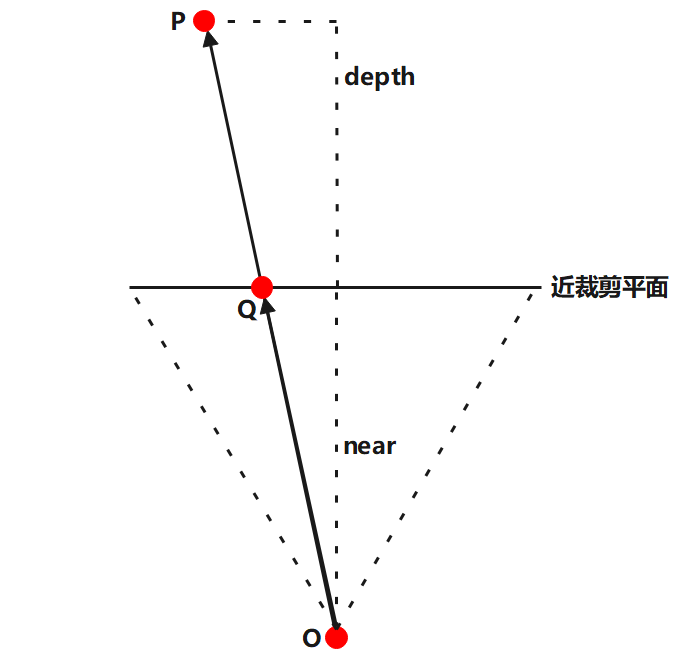
根据上图,可以列出以下方程组关系。其中,公式 2 由三角形相似原理得到,公式 3 由 O、P、Q 三点共线得到。

化简得:
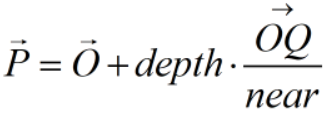
Q 点在近平面上,可以通过近裁剪平面的四个角插值得到,O 和 near 为定值,因此 (OQ / near) 也可以通过插值得到。假设近裁剪平面的四个角分别为 A、B、C、D,我们将 (OA / near)、(OB / near)、(OC / near)、(OD / near) 输入顶点着色器中,光珊化会自动为我们计算插值后的 (OQ / near)。
如下,我们可以在插值寄存器中定义变量 interpolatedRay,用于存储向量 (OQ / near)。
struct v2f {
float4 pos : SV_POSITION; // 裁剪空间顶点坐标
half2 uv : TEXCOORD0; // 纹理uv坐标,
float4 interpolatedRay : TEXCOORD1; // 插值射线向量(由相机指向近平面上点的向量除以near后的坐标)
};2)近裁剪平面四角射线向量计算
记近裁剪平面上左下角、右下角、右上角、左上角、中心、右中心、上中心顶点分别为 A、B、C、D、Q、E、F,相机位置为 O 点,如下:
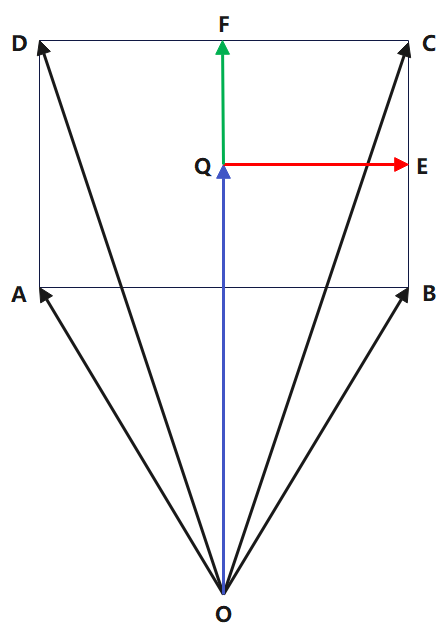
根据几何关系,可以计算向量 OA、OB、OC、OD 如下:
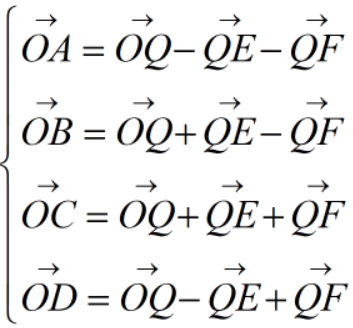
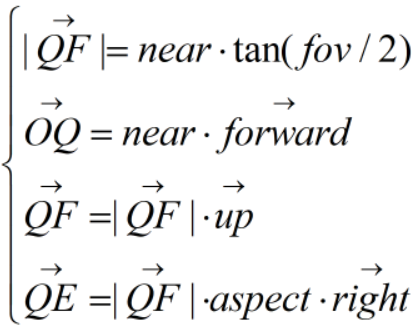
假设摄像机竖直方向的视野角度为 fov(通过 camera.fieldOfView 获取),屏幕宽高比为 aspect(通过 camera.aspect 获取),相机距离近裁剪平面的距离为 near(通过 camera.nearClipPlane 获取),相机向右、向上、向前方向的单位方向向量分别为 right、up、forward(通过 camera.transform 组件获取),则向量 OQ、QE、QF 的计算如下:
2 间距均匀的雷达波特效
2.1 雷达波扩散原理
对于屏幕上任意一点,假设其对应的世界坐标为 worldPos,其线性深度值为 lineDepth(通过 LinearEyeDepth 函数获取),如果 lineDepth >= far - 1(far 通过 _ProjectionParams.z 获取),说明该点落在天空中,不参与雷达波计算,因此本文仅考虑 lineDepth < far - 1 的像素点雷达波计算。
假设雷达波中心坐标为 waveCenter,波纹间距为 waveGap,波纹宽度为 waveLineWidth,雷达波的传播速度和传播时间分别为 waveSpeed、waveTime,雷达波的发射周期为 waveCastTime,雷达波发射的初始距离为 initWaveDist,当前顶点被采样为目标纹理颜色的比率因子为 factor,波纹颜色为 waveColor,当前顶点在叠加雷达波前后的颜色分别为 tex、finalColor,则 finalColor 的计算如下:
float len = length(worldPos - waveCenter); // 当前顶点距离雷达波中心的距离
float time = fmod(waveTime, waveCastTime); // 当前发射周期中, 雷达波传播的时间
float dist = initWaveDist + waveSpeed * time; // 当前发射周期中, 雷达波传播的距离
float mod = fmod(abs(dist - len), waveGap); // 当前顶点距离最近的内环波纹的距离
float rate = min(min(mod, waveGap - mod), waveLineWidth) / waveLineWidth; // 当前顶点处在波纹范围外的比率(值域: [0,1])
float factor = smoothstep(0, 1, rate); // 当前顶点被采样为目标纹理颜色的比率因子(值域: [0,1])
fixed4 finalColor = lerp(waveColor, tex, factor); // 当前顶点叠加雷达波后的颜色2.2 点选设置雷达波中心
LaserRadar.cs
using UnityEngine;
[RequireComponent(typeof(Camera))] // 需要相机组件
public class LaserRadar : MonoBehaviour {
public Color waveColor = Color.red; // 雷达波的颜色
[Range(0.1f, 0.49f)]
public float waveLineWidth = 0.49f; // 雷达波纹的宽度
[Range(1, 10)]
public float waveGap = 2; // 雷达波的间距
[Range(0.5f, 10f)]
public float waveSpeed = 1f; // 雷达波传播的速度
[Range(3, 10)]
public float waveCastTime = 10; // 雷达波发射的时间周期
[Range(3, 10)]
public int waveNum = 5; // 每个发射周期的波纹数
[Range(0.1f, 20)]
public float initWaveDist = 3; // 雷达波初始的距离
[Range(10, 200)]
public float maxWaveDist = 30f; // 雷达波传播的最远距离
private bool enableWave = false; // 是否开启雷达波特效
private Vector4 waveCenter; // 雷达波中心
private float waveTime = 0; // 雷达波开始时间
private Camera cam; // 相机
private Material material = null; // 材质
private void Awake() {
cam = GetComponent<Camera>();
material = new Material(Shader.Find("MyShader/LaserRadar"));
material.hideFlags = HideFlags.DontSave;
}
private void OnEnable() {
cam.depthTextureMode |= DepthTextureMode.Depth;
}
private void Update() {
if (Input.GetMouseButtonDown(0)) {
Ray ray = Camera.main.ScreenPointToRay(Input.mousePosition);
RaycastHit hitInfo;
if (Physics.Raycast(ray, out hitInfo)) {
enableWave = true;
material.SetInt("_Enable", 1);
waveCenter = hitInfo.point;
material.SetVector("_WaveCenter", waveCenter);
waveTime = 0;
}
}
if (enableWave) {
waveTime += Time.deltaTime;
if (waveTime > waveCastTime) {
enableWave = false;
material.SetInt("_Enable", 0);
}
}
}
private void OnRenderImage(RenderTexture src, RenderTexture dest) {
if (enableWave) {
Matrix4x4 frustumCorners = GetFrustumCornersRay();
material.SetMatrix("_FrustumCornersRay", frustumCorners);
material.SetColor("_WaveColor", waveColor);
material.SetFloat("_WaveLineWidth", waveLineWidth);
material.SetFloat("_WaveGap", waveGap);
material.SetFloat("_WaveSpeed", waveSpeed);
material.SetFloat("_WaveTime", waveTime);
material.SetFloat("_WaveCastTime", waveCastTime);
material.SetFloat("_WaveNum", waveNum);
material.SetFloat("_InitWaveDist", initWaveDist);
material.SetFloat("_MaxWaveDist", maxWaveDist);
Graphics.Blit(src, dest, material);
} else {
Graphics.Blit(src, dest);
}
}
private Matrix4x4 GetFrustumCornersRay() {
Matrix4x4 frustumCorners = Matrix4x4.identity;
float fov = cam.fieldOfView;
float near = cam.nearClipPlane;
float aspect = cam.aspect;
float halfHeight = near * Mathf.Tan(fov * 0.5f * Mathf.Deg2Rad);
Vector3 toRight = cam.transform.right * halfHeight * aspect;
Vector3 toTop = cam.transform.up * halfHeight;
Vector3 topLeft = cam.transform.forward * near + toTop - toRight;
topLeft /= near;
Vector3 topRight = cam.transform.forward * near + toRight + toTop;
topRight /= near;
Vector3 bottomLeft = cam.transform.forward * near - toTop - toRight;
bottomLeft /= near;
Vector3 bottomRight = cam.transform.forward * near + toRight - toTop;
bottomRight /= near;
frustumCorners.SetRow(0, bottomLeft);
frustumCorners.SetRow(1, bottomRight);
frustumCorners.SetRow(2, topRight);
frustumCorners.SetRow(3, topLeft);
return frustumCorners;
}
}LaserRadar.shader
Shader "MyShader/LaserRadar" { // 雷达波特效
Properties{
_MainTex("Base (RGB)", 2D) = "white" {} // 主纹理
_Enable("Enable", Int) = 0 // 是否启动雷达波特效
_WaveColor("WaveColor", Color) = (1, 0, 0, 1) // 雷达波的颜色
_WaveLineWidth("WaveLineWidth", Float) = 0.49 // 雷达波纹条的宽度
_WaveCenter("WaveCenter", Vector) = (0, 0, 0, 0) // 雷达的波中心
_WaveGap("WaveGap", Float) = 2 // 雷达波的间距
_WaveSpeed("WaveSpeed", Float) = 1 // 雷达波的传播速度
_WaveTime("WaveTime", Float) = 0 // 雷达波传播的时间
_WaveCastTime("WaveCastTime", Float) = 10 // 雷达波发射的时间周期
_WaveNum("WaveNum", Int) = 5 // 每个发射周期的波纹数
_InitWaveDist("InitWaveDist", Float) = 3 // 雷达波初始的距离
_MaxWaveDist("MaxWaveDist", Float) = 30 // 雷达波传播的最远距离
}
SubShader{
Pass {
// 深度测试始终通过, 关闭深度写入
ZTest Always ZWrite Off
CGPROGRAM
#include "UnityCG.cginc"
#pragma vertex vert
#pragma fragment frag
sampler2D _MainTex; // 主纹理
sampler2D _CameraDepthTexture; // 深度纹理
float4x4 _FrustumCornersRay; // 视锥体四角射线向量(由相机指向近平面上四个角点的向量除以near后的坐标)
int _Enable; // 是否启动雷达波特效
fixed4 _WaveColor; // 雷达波的颜色
float _WaveLineWidth; // 雷达波纹的宽度
float4 _WaveCenter; // 雷达波的中心
float _WaveGap; // 雷达波的间距
float _WaveSpeed; // 雷达波的速度
float _WaveTime; // 雷达波传播的时间
float _WaveCastTime; // 雷达波发射的时间周期
int _WaveNum; // 每个发射周期的波纹数
float _InitWaveDist; // 雷达波初始的距离
float _MaxWaveDist; // 雷达波传播的最远距离
struct v2f {
float4 pos : SV_POSITION; // 裁剪空间顶点坐标
half2 uv : TEXCOORD0; // 纹理uv坐标,
float4 interpolatedRay : TEXCOORD1; // 插值射线向量(由相机指向近平面上点的向量除以near后的坐标)
};
float4 getInterpolatedRay(half2 uv) { // 获取插值射线向量(由相机指向近平面上四个角点的向量除以near后的坐标)
int index = 0;
if (uv.x < 0.5 && uv.y < 0.5) {
index = 0;
} else if (uv.x > 0.5 && uv.y < 0.5) {
index = 1;
} else if (uv.x > 0.5 && uv.y > 0.5) {
index = 2;
} else {
index = 3;
}
return _FrustumCornersRay[index];
}
v2f vert(appdata_img v) {
v2f o;
o.pos = UnityObjectToClipPos(v.vertex); // 计算裁剪坐标系中顶点坐标, 等价于: mul(unity_MatrixMVP, v.vertex)
o.uv = v.texcoord;
o.interpolatedRay = getInterpolatedRay(v.texcoord); // 获取插值射线向量(由相机指向近平面上四个角点的向量除以near后的坐标)
return o;
}
fixed4 frag(v2f i) : SV_Target{ // v2f_img为内置结构体, 里面只包含pos和uv
if (_Enable == 0) {
return tex2D(_MainTex, i.uv);
}
float depth = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, i.uv); // 非线性的深度, tex2D(_CameraDepthTexture, i.uv).r
float linearDepth = LinearEyeDepth(depth); // 线性的深度
float factor = 1;
if (linearDepth < _ProjectionParams.z - 1) { // _ProjectionParams = (1, near, far, 1 / far)
float3 worldPos = _WorldSpaceCameraPos + linearDepth * i.interpolatedRay.xyz; // 顶点世界坐标
float len = length(worldPos - _WaveCenter.xyz); // 当前顶点距离雷达波中心的距离
if (len < _InitWaveDist || len > _MaxWaveDist) {
return tex2D(_MainTex, i.uv);
}
float time = fmod(_WaveTime, _WaveCastTime); // 当前发射周期中, 雷达波传播的时间
float dist = _InitWaveDist + _WaveSpeed * time; // 当前发射周期中, 雷达波传播的距离
if (len > dist + _WaveLineWidth || len < dist - _WaveGap * (_WaveNum - 1) - _WaveLineWidth) {
return tex2D(_MainTex, i.uv);
}
float mod = fmod(abs(dist - len), _WaveGap); // 当前顶点距离最近的内环波纹的距离
float rate = min(min(mod, _WaveGap - mod), _WaveLineWidth) / _WaveLineWidth; // 当前顶点处在波纹范围外的比率
factor = smoothstep(0, 1, rate); // 当前顶点被采样为目标纹理颜色的比率因子
}
fixed4 tex = tex2D(_MainTex, i.uv);
fixed4 color = lerp(_WaveColor, tex, factor);
return color;
}
ENDCG
}
}
FallBack off
}运行效果如下:

2.3 雷达波中心跟随物体运动
LaserRadar.cs
using UnityEngine;
[RequireComponent(typeof(Camera))] // 需要相机组件
public class LaserRadar : MonoBehaviour {
public Color waveColor = Color.red; // 雷达波的颜色
[Range(0.1f, 0.49f)]
public float waveLineWidth = 0.49f; // 雷达波纹的宽度
[Range(1, 10)]
public float waveGap = 2; // 雷达波的间距
[Range(0.5f, 10f)]
public float waveSpeed = 1f; // 雷达波传播的速度
[Range(3, 10)]
public float waveCastTime = 10; // 雷达波发射的时间周期
[Range(3, 10)]
public int waveNum = 5; // 每个发射周期的波纹数
[Range(0.1f, 20)]
public float initWaveDist = 3; // 雷达波初始的距离
[Range(10, 200)]
public float maxWaveDist = 30f; // 雷达波传播的最远距离
private bool enableWave = false; // 是否开启雷达波特效
private Vector4 waveCenter; // 雷达波中心
private Camera cam; // 相机
private Material material = null; // 材质
private Transform target; // 发射雷达波的目标物体
private void Awake() {
cam = GetComponent<Camera>();
material = new Material(Shader.Find("MyShader/LaserRadar"));
material.hideFlags = HideFlags.DontSave;
target = GameObject.Find("Car").transform;
}
private void OnEnable() {
cam.depthTextureMode |= DepthTextureMode.Depth;
enableWave = true;
material.SetInt("_Enable", 1);
}
private void OnRenderImage(RenderTexture src, RenderTexture dest) {
if (enableWave) {
Matrix4x4 frustumCorners = GetFrustumCornersRay();
material.SetMatrix("_FrustumCornersRay", frustumCorners);
material.SetColor("_WaveColor", waveColor);
waveCenter = target.position;
material.SetVector("_WaveCenter", waveCenter);
material.SetFloat("_WaveLineWidth", waveLineWidth);
material.SetFloat("_WaveGap", waveGap);
material.SetFloat("_WaveSpeed", waveSpeed);
material.SetFloat("_WaveCastTime", waveCastTime);
material.SetFloat("_WaveNum", waveNum);
material.SetFloat("_InitWaveDist", initWaveDist);
material.SetFloat("_MaxWaveDist", maxWaveDist);
Graphics.Blit(src, dest, material);
} else {
Graphics.Blit(src, dest);
}
}
private Matrix4x4 GetFrustumCornersRay() {
Matrix4x4 frustumCorners = Matrix4x4.identity;
float fov = cam.fieldOfView;
float near = cam.nearClipPlane;
float aspect = cam.aspect;
float halfHeight = near * Mathf.Tan(fov * 0.5f * Mathf.Deg2Rad);
Vector3 toRight = cam.transform.right * halfHeight * aspect;
Vector3 toTop = cam.transform.up * halfHeight;
Vector3 topLeft = cam.transform.forward * near + toTop - toRight;
topLeft /= near;
Vector3 topRight = cam.transform.forward * near + toRight + toTop;
topRight /= near;
Vector3 bottomLeft = cam.transform.forward * near - toTop - toRight;
bottomLeft /= near;
Vector3 bottomRight = cam.transform.forward * near + toRight - toTop;
bottomRight /= near;
frustumCorners.SetRow(0, bottomLeft);
frustumCorners.SetRow(1, bottomRight);
frustumCorners.SetRow(2, topRight);
frustumCorners.SetRow(3, topLeft);
return frustumCorners;
}
}LaserRadar.shader
Shader "MyShader/LaserRadar" { // 雷达波特效
Properties{
_MainTex("Base (RGB)", 2D) = "white" {} // 主纹理
_Enable("Enable", Int) = 0 // 是否启动雷达波特效
_WaveColor("WaveColor", Color) = (1, 0, 0, 1) // 雷达波的颜色
_WaveLineWidth("WaveLineWidth", Float) = 0.49 // 雷达波纹条的宽度
_WaveCenter("WaveCenter", Vector) = (0, 0, 0, 0) // 雷达的波中心
_WaveGap("WaveGap", Float) = 2 // 雷达波的间距
_WaveSpeed("WaveSpeed", Float) = 1 // 雷达波的传播速度
_WaveCastTime("WaveCastTime", Float) = 10 // 雷达波发射的时间周期
_WaveNum("WaveNum", Int) = 5 // 每个发射周期的波纹数
_InitWaveDist("InitWaveDist", Float) = 3 // 雷达波初始的距离
_MaxWaveDist("MaxWaveDist", Float) = 30 // 雷达波传播的最远距离
}
SubShader{
Pass {
// 深度测试始终通过, 关闭深度写入
ZTest Always ZWrite Off
CGPROGRAM
#include "UnityCG.cginc"
#pragma vertex vert
#pragma fragment frag
sampler2D _MainTex; // 主纹理
sampler2D _CameraDepthTexture; // 深度纹理
float4x4 _FrustumCornersRay; // 视锥体四角射线向量(由相机指向近平面上四个角点的向量除以near后的坐标)
int _Enable; // 是否启动雷达波特效
fixed4 _WaveColor; // 雷达波的颜色
float _WaveLineWidth; // 雷达波纹的宽度
float4 _WaveCenter; // 雷达波的中心
float _WaveGap; // 雷达波的间距
float _WaveSpeed; // 雷达波的速度
float _WaveCastTime; // 雷达波发射的时间周期
int _WaveNum; // 每个发射周期的波纹数
float _InitWaveDist; // 雷达波初始的距离
float _MaxWaveDist; // 雷达波传播的最远距离
struct v2f {
float4 pos : SV_POSITION; // 裁剪空间顶点坐标
half2 uv : TEXCOORD0; // 纹理uv坐标,
float4 interpolatedRay : TEXCOORD1; // 插值射线向量(由相机指向近平面上点的向量除以near后的坐标)
};
float4 getInterpolatedRay(half2 uv) { // 获取插值射线向量(由相机指向近平面上四个角点的向量除以near后的坐标)
int index = 0;
if (uv.x < 0.5 && uv.y < 0.5) {
index = 0;
} else if (uv.x > 0.5 && uv.y < 0.5) {
index = 1;
} else if (uv.x > 0.5 && uv.y > 0.5) {
index = 2;
} else {
index = 3;
}
return _FrustumCornersRay[index];
}
v2f vert(appdata_img v) {
v2f o;
o.pos = UnityObjectToClipPos(v.vertex); // 计算裁剪坐标系中顶点坐标, 等价于: mul(unity_MatrixMVP, v.vertex)
o.uv = v.texcoord;
o.interpolatedRay = getInterpolatedRay(v.texcoord); // 获取插值射线向量(由相机指向近平面上四个角点的向量除以near后的坐标)
return o;
}
fixed4 frag(v2f i) : SV_Target{ // v2f_img为内置结构体, 里面只包含pos和uv
if (_Enable == 0) {
return tex2D(_MainTex, i.uv);
}
float depth = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, i.uv); // 非线性的深度, tex2D(_CameraDepthTexture, i.uv).r
float linearDepth = LinearEyeDepth(depth); // 线性的深度
float factor = 1;
if (linearDepth < _ProjectionParams.z - 1) { // _ProjectionParams = (1, near, far, 1 / far)
float3 worldPos = _WorldSpaceCameraPos + linearDepth * i.interpolatedRay.xyz; // 顶点世界坐标
float len = length(worldPos - _WaveCenter.xyz); // 当前顶点距离雷达波中心的距离
if (len < _InitWaveDist || len > _MaxWaveDist) {
return tex2D(_MainTex, i.uv);
}
float time = fmod(_Time.y, _WaveCastTime); // 当前发射周期中, 雷达波传播的时间, _Time = (t/20, t, t*2, t*3)
float dist = _InitWaveDist + _WaveSpeed * time; // 当前发射周期中, 雷达波传播的距离
if (len > dist + _WaveLineWidth || len < dist - _WaveGap * (_WaveNum - 1) - _WaveLineWidth) {
return tex2D(_MainTex, i.uv);
}
float mod = fmod(abs(dist - len), _WaveGap); // 当前顶点距离最近的内环波纹的距离
float rate = min(min(mod, _WaveGap - mod), _WaveLineWidth) / _WaveLineWidth; // 当前顶点处在波纹范围外的比率
factor = smoothstep(0, 1, rate); // 当前顶点被采样为目标纹理颜色的比率因子
}
fixed4 tex = tex2D(_MainTex, i.uv);
fixed4 color = lerp(_WaveColor, tex, factor);
return color;
}
ENDCG
}
}
FallBack off
}运行效果如下:

3 间距递增的雷达波特效
3.1 雷达波扩散原理
对于屏幕上任意一点,假设其对应的世界坐标为 worldPos,其线性深度值为 lineDepth(通过 LinearEyeDepth 函数获取),如果 lineDepth >= far - 1(far 通过 _ProjectionParams.z 获取),说明该点落在天空中,不参与雷达波计算,因此本文仅考虑 lineDepth < far - 1 的像素点雷达波计算。
假设雷达波中心坐标为 waveCenter,波纹间距为 waveGap,波纹宽度为 waveLineWidth,雷达波的传播速度和传播时间分别为 waveSpeed、waveTime,雷达波的发射周期为 waveCastTime,雷达波发射的初始距离为 initWaveDist,当前顶点被采样为目标纹理颜色的比率因子为 factor,波纹颜色为 waveColor,当前顶点在叠加雷达波前后的颜色分别为 tex、finalColor,则 finalColor 的计算如下:
float len = length(worldPos - waveCenter); // 当前顶点距离雷达波中心的距离
float time = fmod(waveTime, waveCastTime); // 当前发射周期中, 雷达波传播的时间
float waveGap = initWaveDist + waveSpeed * time; // 当前发射周期中, 雷达波传播的距离
float mod = fmod(len, waveGap); // 当前顶点距离最近的内环波纹的距离
float rate = min(min(mod, waveGap - mod), waveLineWidth) / waveLineWidth; // 当前顶点处在波纹范围外的比率(值域: [0,1])
float factor = smoothstep(0, 1, rate); // 当前顶点被采样为目标纹理颜色的比率因子(值域: [0,1])
fixed4 finalColor = lerp(waveColor, tex, factor); // 当前顶点叠加雷达波后的颜3.2 点选设置雷达波中心
LaserRadar.cs
using UnityEngine;
[RequireComponent(typeof(Camera))] // 需要相机组件
public class LaserRadar1 : MonoBehaviour {
public Color waveColor = Color.red; // 雷达波的颜色
[Range(0.1f, 0.49f)]
public float waveLineWidth = 0.49f; // 雷达波纹的宽度
[Range(0.5f, 10f)]
public float waveSpeed = 1f; // 雷达波传播的速度
[Range(3, 10)]
public float waveCastTime = 5; // 雷达波发射的时间周期
[Range(0.1f, 20)]
public float initWaveDist = 3; // 雷达波初始的距离
[Range(10, 200)]
public float maxWaveDist = 30f; // 雷达波传播的最远距离
private bool enableWave = false; // 是否开启雷达波特效
private Vector4 waveCenter; // 雷达波中心
private float waveTime = 0; // 雷达波开始时间
private Camera cam; // 相机
private Material material = null; // 材质
private void Awake() {
cam = GetComponent<Camera>();
material = new Material(Shader.Find("MyShader/LaserRadar"));
material.hideFlags = HideFlags.DontSave;
}
private void OnEnable() {
cam.depthTextureMode |= DepthTextureMode.Depth;
}
private void Update() {
if (Input.GetMouseButtonDown(0)) {
Ray ray = Camera.main.ScreenPointToRay(Input.mousePosition);
RaycastHit hitInfo;
if (Physics.Raycast(ray, out hitInfo)) {
enableWave = true;
material.SetInt("_Enable", 1);
waveCenter = hitInfo.point;
material.SetVector("_WaveCenter", waveCenter);
waveTime = 0;
}
}
if (enableWave) {
waveTime += Time.deltaTime;
if (waveTime > waveCastTime) {
enableWave = false;
material.SetInt("_Enable", 0);
}
}
}
private void OnRenderImage(RenderTexture src, RenderTexture dest) {
if (enableWave) {
Matrix4x4 frustumCorners = GetFrustumCornersRay();
material.SetMatrix("_FrustumCornersRay", frustumCorners);
material.SetColor("_WaveColor", waveColor);
material.SetFloat("_WaveLineWidth", waveLineWidth);
material.SetFloat("_WaveSpeed", waveSpeed);
material.SetFloat("_WaveTime", waveTime);
material.SetFloat("_WaveCastTime", waveCastTime);
material.SetFloat("_InitWaveDist", initWaveDist);
material.SetFloat("_MaxWaveDist", maxWaveDist);
Graphics.Blit(src, dest, material);
} else {
Graphics.Blit(src, dest);
}
}
private Matrix4x4 GetFrustumCornersRay() {
Matrix4x4 frustumCorners = Matrix4x4.identity;
float fov = cam.fieldOfView;
float near = cam.nearClipPlane;
float aspect = cam.aspect;
float halfHeight = near * Mathf.Tan(fov * 0.5f * Mathf.Deg2Rad);
Vector3 toRight = cam.transform.right * halfHeight * aspect;
Vector3 toTop = cam.transform.up * halfHeight;
Vector3 topLeft = cam.transform.forward * near + toTop - toRight;
topLeft /= near;
Vector3 topRight = cam.transform.forward * near + toRight + toTop;
topRight /= near;
Vector3 bottomLeft = cam.transform.forward * near - toTop - toRight;
bottomLeft /= near;
Vector3 bottomRight = cam.transform.forward * near + toRight - toTop;
bottomRight /= near;
frustumCorners.SetRow(0, bottomLeft);
frustumCorners.SetRow(1, bottomRight);
frustumCorners.SetRow(2, topRight);
frustumCorners.SetRow(3, topLeft);
return frustumCorners;
}
}LaserRadar.shader
Shader "MyShader/LaserRadar" { // 雷达波特效
Properties{
_MainTex("Base (RGB)", 2D) = "white" {} // 主纹理
_Enable("Enable", Int) = 0 // 是否启动雷达波特效
_WaveColor("WaveColor", Color) = (1, 0, 0, 1) // 雷达波的颜色
_WaveLineWidth("WaveLineWidth", Float) = 0.3 // 雷达波纹的宽度
_WaveCenter("WaveCenter", Vector) = (0, 0, 0, 0) // 雷达的波中心
_WaveSpeed("WaveSpeed", Float) = 1 // 雷达波的传播速度
_WaveTime("WaveTime", Float) = 0 // 雷达波传播的时间
_WaveCastTime("WaveCastTime", Float) = 5 // 雷达波发射的时间周期
_InitWaveDist("InitWaveDist", Float) = 3 // 雷达波初始的距离
_MaxWaveDist("MaxWaveDist", Float) = 30 // 雷达波传播的最远距离
}
SubShader{
Pass {
// 深度测试始终通过, 关闭深度写入
ZTest Always ZWrite Off
CGPROGRAM
#include "UnityCG.cginc"
#pragma vertex vert
#pragma fragment frag
sampler2D _MainTex; // 主纹理
sampler2D _CameraDepthTexture; // 深度纹理
float4x4 _FrustumCornersRay; // 视锥体四角射线向量(由相机指向近平面上四个角点的向量除以near后的坐标)
int _Enable; // 是否启动雷达波特效
fixed4 _WaveColor; // 雷达波的颜色
float _WaveLineWidth; // 雷达波纹的宽度
float4 _WaveCenter; // 雷达波的中心
float _WaveSpeed; // 雷达波的速度
float _WaveTime; // 雷达波传播的时间
float _WaveCastTime; // 雷达波发射的时间周期
float _InitWaveDist; // 雷达波初始的距离
float _MaxWaveDist; // 雷达波传播的最远距离
struct v2f {
float4 pos : SV_POSITION; // 裁剪空间顶点坐标
half2 uv : TEXCOORD0; // 纹理uv坐标,
float4 interpolatedRay : TEXCOORD1; // 插值射线向量(由相机指向近平面上点的向量除以near后的坐标)
};
float4 getInterpolatedRay(half2 uv) { // 获取插值射线向量(由相机指向近平面上四个角点的向量除以near后的坐标)
int index = 0;
if (uv.x < 0.5 && uv.y < 0.5) {
index = 0;
} else if (uv.x > 0.5 && uv.y < 0.5) {
index = 1;
} else if (uv.x > 0.5 && uv.y > 0.5) {
index = 2;
} else {
index = 3;
}
return _FrustumCornersRay[index];
}
v2f vert(appdata_img v) {
v2f o;
o.pos = UnityObjectToClipPos(v.vertex); // 计算裁剪坐标系中顶点坐标, 等价于: mul(unity_MatrixMVP, v.vertex)
o.uv = v.texcoord;
o.interpolatedRay = getInterpolatedRay(v.texcoord); // 获取插值射线向量(由相机指向近平面上四个角点的向量除以near后的坐标)
return o;
}
fixed4 frag(v2f i) : SV_Target { // v2f_img为内置结构体, 里面只包含pos和uv
if (_Enable == 0) {
return tex2D(_MainTex, i.uv);
}
float depth = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, i.uv); // 非线性的深度, tex2D(_CameraDepthTexture, i.uv).r
float linearDepth = LinearEyeDepth(depth); // 线性的深度
float factor = 1;
if (linearDepth < _ProjectionParams.z - 1) { // _ProjectionParams = (1, near, far, 1 / far)
float3 worldPos = _WorldSpaceCameraPos + linearDepth * i.interpolatedRay.xyz; // 顶点世界坐标
float len = length(worldPos - _WaveCenter.xyz); // 当前顶点距离雷达波中心的距离
if (len < _InitWaveDist || len > _MaxWaveDist) {
return tex2D(_MainTex, i.uv);
}
float time = fmod(_WaveTime, _WaveCastTime); // 当前发射周期中, 雷达波传播的时间
float waveGap = _InitWaveDist + _WaveSpeed * time; // 当前发射周期中, 雷达波传播的距离
float mod = fmod(len, waveGap); // 当前顶点距离最近的内环波纹的距离
float rate = min(min(mod, waveGap - mod), _WaveLineWidth) / _WaveLineWidth; // 当前顶点处在波纹范围外的比率
factor = smoothstep(0, 1, rate); // 当前顶点被采样为目标纹理颜色的比率因子
}
fixed4 tex = tex2D(_MainTex, i.uv);
fixed4 color = lerp(_WaveColor, tex, factor);
return color;
}
ENDCG
}
}
FallBack off
}运行效果如下:

3.3 雷达波中心跟随物体运动
LaserRadar.cs
using UnityEngine;
[RequireComponent(typeof(Camera))] // 需要相机组件
public class LaserRadar : MonoBehaviour {
public Color waveColor = Color.red; // 雷达波的颜色
[Range(0.1f, 0.49f)]
public float waveLineWidth = 0.49f; // 雷达波纹的宽度
[Range(0.5f, 10f)]
public float waveSpeed = 1f; // 雷达波传播的速度
[Range(3, 10)]
public float waveCastTime = 5; // 雷达波发射的时间周期
[Range(0.1f, 20)]
public float initWaveDist = 3; // 雷达波初始的距离
[Range(10, 200)]
public float maxWaveDist = 30f; // 雷达波传播的最远距离
private bool enableWave = false; // 是否开启雷达波特效
private Vector4 waveCenter; // 雷达波中心
private Camera cam; // 相机
private Material material = null; // 材质
private Transform target; // 发射雷达波的目标物体
private void Awake() {
cam = GetComponent<Camera>();
material = new Material(Shader.Find("MyShader/LaserRadar"));
material.hideFlags = HideFlags.DontSave;
target = GameObject.Find("Car").transform;
}
private void OnEnable() {
cam.depthTextureMode |= DepthTextureMode.Depth;
enableWave = true;
material.SetInt("_Enable", 1);
}
private void OnRenderImage(RenderTexture src, RenderTexture dest) {
if (enableWave) {
Matrix4x4 frustumCorners = GetFrustumCornersRay();
material.SetMatrix("_FrustumCornersRay", frustumCorners);
material.SetColor("_WaveColor", waveColor);
waveCenter = target.position;
material.SetVector("_WaveCenter", waveCenter);
material.SetFloat("_WaveLineWidth", waveLineWidth);
material.SetFloat("_WaveSpeed", waveSpeed);
material.SetFloat("_WaveCastTime", waveCastTime);
material.SetFloat("_InitWaveDist", initWaveDist);
material.SetFloat("_MaxWaveDist", maxWaveDist);
Graphics.Blit(src, dest, material);
} else {
Graphics.Blit(src, dest);
}
}
private Matrix4x4 GetFrustumCornersRay() {
Matrix4x4 frustumCorners = Matrix4x4.identity;
float fov = cam.fieldOfView;
float near = cam.nearClipPlane;
float aspect = cam.aspect;
float halfHeight = near * Mathf.Tan(fov * 0.5f * Mathf.Deg2Rad);
Vector3 toRight = cam.transform.right * halfHeight * aspect;
Vector3 toTop = cam.transform.up * halfHeight;
Vector3 topLeft = cam.transform.forward * near + toTop - toRight;
topLeft /= near;
Vector3 topRight = cam.transform.forward * near + toRight + toTop;
topRight /= near;
Vector3 bottomLeft = cam.transform.forward * near - toTop - toRight;
bottomLeft /= near;
Vector3 bottomRight = cam.transform.forward * near + toRight - toTop;
bottomRight /= near;
frustumCorners.SetRow(0, bottomLeft);
frustumCorners.SetRow(1, bottomRight);
frustumCorners.SetRow(2, topRight);
frustumCorners.SetRow(3, topLeft);
return frustumCorners;
}
}LaserRadar.shader
Shader "MyShader/LaserRadar" { // 雷达波特效
Properties{
_MainTex("Base (RGB)", 2D) = "white" {} // 主纹理
_Enable("Enable", Int) = 0 // 是否启动雷达波特效
_WaveColor("WaveColor", Color) = (1, 0, 0, 1) // 雷达波的颜色
_WaveLineWidth("WaveLineWidth", Float) = 0.49 // 雷达波纹的宽度
_WaveCenter("WaveCenter", Vector) = (0, 0, 0, 0) // 雷达的波中心
_WaveSpeed("WaveSpeed", Float) = 1 // 雷达波的传播速度
_WaveCastTime("WaveCastTime", Float) = 5 // 雷达波发射的时间周期
_InitWaveDist("InitWaveDist", Float) = 3 // 雷达波初始的距离
_MaxWaveDist("MaxWaveDist", Float) = 30 // 雷达波传播的最远距离
}
SubShader{
Pass {
// 深度测试始终通过, 关闭深度写入
ZTest Always ZWrite Off
CGPROGRAM
#include "UnityCG.cginc"
#pragma vertex vert
#pragma fragment frag
sampler2D _MainTex; // 主纹理
sampler2D _CameraDepthTexture; // 深度纹理
float4x4 _FrustumCornersRay; // 视锥体四角射线向量(由相机指向近平面上四个角点的向量除以near后的坐标)
int _Enable; // 是否启动雷达波特效
fixed4 _WaveColor; // 雷达波的颜色
float _WaveLineWidth; // 雷达波纹的宽度
float4 _WaveCenter; // 雷达波的中心
float _WaveSpeed; // 雷达波的速度
float _WaveCastTime; // 雷达波发射的时间周期
float _InitWaveDist; // 雷达波初始的距离
float _MaxWaveDist; // 雷达波传播的最远距离
struct v2f {
float4 pos : SV_POSITION; // 裁剪空间顶点坐标
half2 uv : TEXCOORD0; // 纹理uv坐标,
float4 interpolatedRay : TEXCOORD1; // 插值射线向量(由相机指向近平面上点的向量除以near后的坐标)
};
float4 getInterpolatedRay(half2 uv) { // 获取插值射线向量(由相机指向近平面上四个角点的向量除以near后的坐标)
int index = 0;
if (uv.x < 0.5 && uv.y < 0.5) {
index = 0;
}
else if (uv.x > 0.5 && uv.y < 0.5) {
index = 1;
} else if (uv.x > 0.5 && uv.y > 0.5) {
index = 2;
} else {
index = 3;
}
return _FrustumCornersRay[index];
}
v2f vert(appdata_img v) {
v2f o;
o.pos = UnityObjectToClipPos(v.vertex); // 计算裁剪坐标系中顶点坐标, 等价于: mul(unity_MatrixMVP, v.vertex)
o.uv = v.texcoord;
o.interpolatedRay = getInterpolatedRay(v.texcoord); // 获取插值射线向量(由相机指向近平面上四个角点的向量除以near后的坐标)
return o;
}
fixed4 frag(v2f i) : SV_Target { // v2f_img为内置结构体, 里面只包含pos和uv
if (_Enable == 0) {
return tex2D(_MainTex, i.uv);
}
float depth = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, i.uv); // 非线性的深度, tex2D(_CameraDepthTexture, i.uv).r
float linearDepth = LinearEyeDepth(depth); // 线性的深度
float factor = 1;
if (linearDepth < _ProjectionParams.z - 1) { // _ProjectionParams = (1, near, far, 1 / far)
float3 worldPos = _WorldSpaceCameraPos + linearDepth * i.interpolatedRay.xyz; // 顶点世界坐标
float len = length(worldPos - _WaveCenter.xyz); // 当前顶点距离雷达波中心的距离
if (len < _InitWaveDist || len > _MaxWaveDist) {
return tex2D(_MainTex, i.uv);
}
float time = fmod(_Time.y, _WaveCastTime); // 当前发射周期中, 雷达波传播的时间, _Time = (t/20, t, t*2, t*3)
float waveGap = _InitWaveDist + _WaveSpeed * time; // 当前发射周期中, 雷达波传播的距离
float mod = fmod(len, waveGap); // 当前顶点距离最近的内环波纹的距离
float rate = min(min(mod, waveGap - mod), _WaveLineWidth) / _WaveLineWidth; // 当前顶点处在波纹范围外的比率
factor = smoothstep(0, 1, rate); // 当前顶点被采样为目标纹理颜色的比率因子
}
fixed4 tex = tex2D(_MainTex, i.uv);
fixed4 color = lerp(_WaveColor, tex, factor);
return color;
}
ENDCG
}
}
FallBack off
}运行效果如下: