前言
有温度 有深度 有广度 就等你来关注哦~
所有文章完整的素材+源码都在👇👇
粉丝白嫖源码福利,请移步至CSDN社区或文末公众hao即可免费。
在这次的案例实战中,我们将使用Python 3和OpenCV。我们将使用OpenCV,因为它是一个
著名的开源计算机视觉库,其中提供了许多处理图像和视频的功能。在本次案例中,我们将使
用OpenCV、Canny来进行边缘检测与轮廓检测。
——边缘检测Canny
边缘检测器是一种被广泛使用的算法,并被认为是边缘检测最优的算法,该方法使用了比高斯
差分算法更复杂的技巧,如多向灰度梯度和滞后阈值化。
小科普就先到这里了撒!下面我们正式开始今天的案例吧。

正文
下面文章开始前进行详细的介绍吧!
一、什么是边缘检测?
边缘检测是计算机视觉中一个非常古老的问题,它涉及到检测图像中的边缘来确定目标的边
界,从而分离感兴趣的目标。最流行的边缘检测技术之一是Canny边缘检测,它已经成为大多
数计算机视觉研究人员和实践者的首选方法。让我们快速看一下Canny边缘检测。
二、Canny边缘检测算法
1983年,John Canny在麻省理工学院发明了Canny边缘检测。它将边缘检测视为一个信号处
理问题。其核心思想是,如果你观察图像中每个像素的强度变化,它在边缘的时候非常高。
在下面这张简单的图片中,强度变化只发生在边界上。所以,你可以很容易地通过观察像素强
度的变化来识别边缘。

现在,看下这张图片。强度不是恒定的,但强度的变化率在边缘处最高。(微积分复习:变化率可以用一阶导数(梯度)来计算。)

Canny边缘检测器通过4步来识别边缘:
1.去噪:因为这种方法依赖于强度的突然变化,如果图像有很多随机噪声,那么会将噪声作为
边缘。所以,使用5×5的高斯滤波器平滑你的图像是一个非常好的主意。
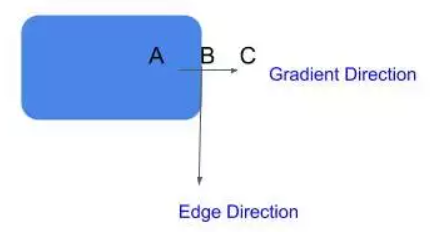
2.梯度计算:下一步,我们计算图像中每个像素的强度的梯度(强度变化率)。我们也计算梯度的
方向。
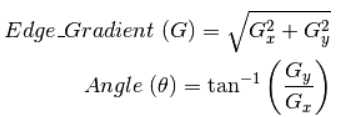
梯度方向垂直于边缘,它被映射到四个方向中的一个(水平、垂直和两个对角线方向)。
3.非极大值抑制:现在,我们想删除不是边缘的像素(设置它们的值为0)。你可能会说,我们可
以简单地选取梯度值最高的像素,这些就是我们的边。然而,在真实的图像中,梯度不是简单
地在只一个像素处达到峰值,而是在临近边缘的像素处都非常高。因此我们在梯度方向上取
3×3附近的局部最大值。
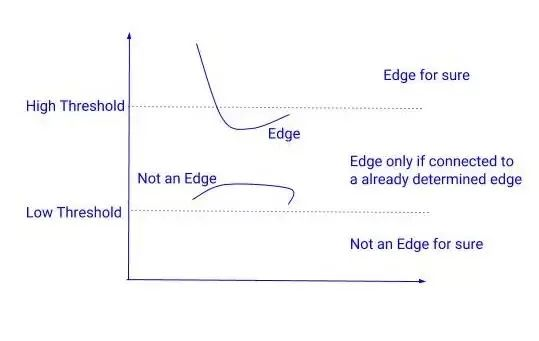
4.迟滞阈值化:在下一步中,我们需要决定一个梯度的阈值,低于这个阈值所有的像素都将被
抑制(设置为0)。而Canny边缘检测器则采用迟滞阈值法。迟滞阈值法是一种非常简单而有效的
方法。我们使用两个阈值来代替只用一个阈值:
高阈值 = 选择一个非常高的值,这样任何梯度值高于这个值的像素都肯定是一个边缘。
低阈值 = 选择一个非常低的值,任何梯度值低于该值的像素绝对不是边缘。在这两个阈值之间有梯度的像素会被检查,如果它们和边缘相连,就会留下,否则就会去掉。
三、案例思考
1)Canny边缘检测器算法基本步骤:
平滑图像:通过使用合适的模糊半径执行高斯模糊来减少图像内的噪声。
计算图像的梯度:这里计算图像的梯度,并将梯度分类为垂直、水平和斜对角。这一步的输出用于在下一步中计算真正的边缘。
非最大值抑制:利用上一步计算出来的梯度方向,检测某一像素在梯度的正方向和负方向上是否是局部最大值,如果是,则抑制该像素(像素不属于边缘)。这是一种边缘细化技术,用最急剧的变换选出边缘点。
用滞后阈值化选择边缘:最后一步,检查某一条边缘是否明显到足以作为最终输出,最后去除所有不明显的边缘。2)环境配置
运行环境: Python 3 、Pycharm、cv2。其他内置模块,安装好python环境就可以了。
如果需要安装第三方库的话✅下面可以找我拿资料的哈!
(win + R 输入cmd 输入安装命令 pip install 模块名 (如果你觉得安 装速度比较慢, 你可 以切 换国内镜像源)
第三方库的安装: +python安装包 安装教程视频 anaconda5.2.0等等
安装包 +pycharm 社区版 专业版 及 激活码免费 (可以找我免费领取的)
pip install + 模块名 或者 带镜像源 pip install -i pypi.douban.com/simple/ +模块名四、代码展示
1)Canny函数的原型为:
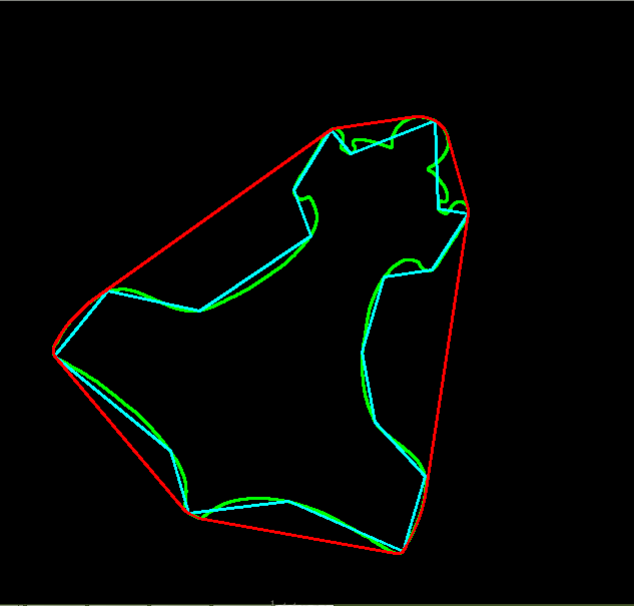
轮廓检测;轮廓检测主要由cv2.findContours函数实现的。
函数的原型为函数参数:
第一个参数是寻找轮廓的图像;
第二个参数表示轮廓的检索模式,有四种(本文介绍的都是新的cv2接口):cv2.RETR_EXTERNAL表示只检测外轮廓。
cv2.RETR_LIST检测的轮廓不建立等级关系。
cv2.RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。cv2.RETR_TREE建立一个等级树结构的轮廓。
第三个参数:method为轮廓的逼近方法cv2.CHAIN_APPROX_NONE存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1。 cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息。 cv2.CHAIN_APPROX_TC89_L1和cv2.CHAIN_APPROX_TC89_KCOS都是使用teh-Chinl chain近似算法。 返回值 如:image, contours, hier = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) image:是原图像 contours:图像的轮廓,以列表的形式表示,每个元素都是图像中的一个轮廓。
hier:相应轮廓之间的关系。这是一个ndarray,其中的元素个数和轮廓个数相同,每个轮廓contours[i]对应4个hierarchy元素hierarchy[i][0] ~hierarchy[i][3],分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,如果没有对应项,则该值为负数。2)主程序
import cv2
import numpy as np
img = cv2.imread("hammer.jpg", 0)
cv2.imwrite("canny.jpg", cv2.Canny(img, 200, 300))
cv2.imshow("canny", cv2.imread("canny.jpg"))
cv2.waitKey()
cv2.destroyAllWindows()五、效果展示
1)原图——

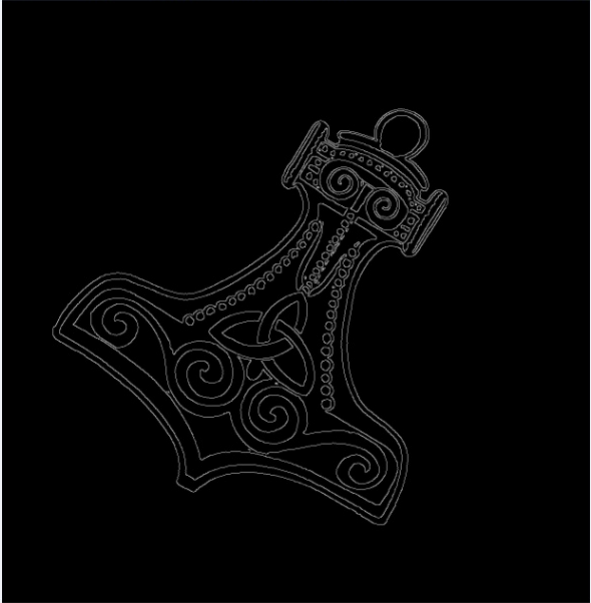
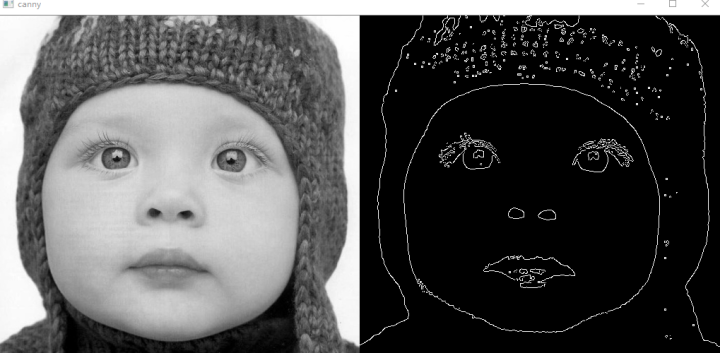
2)运行效果图一
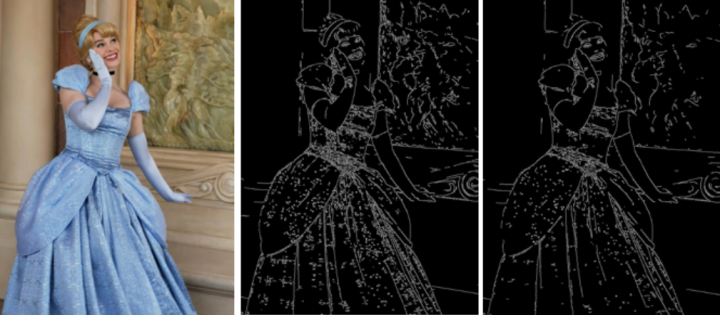
3)效果运行图二
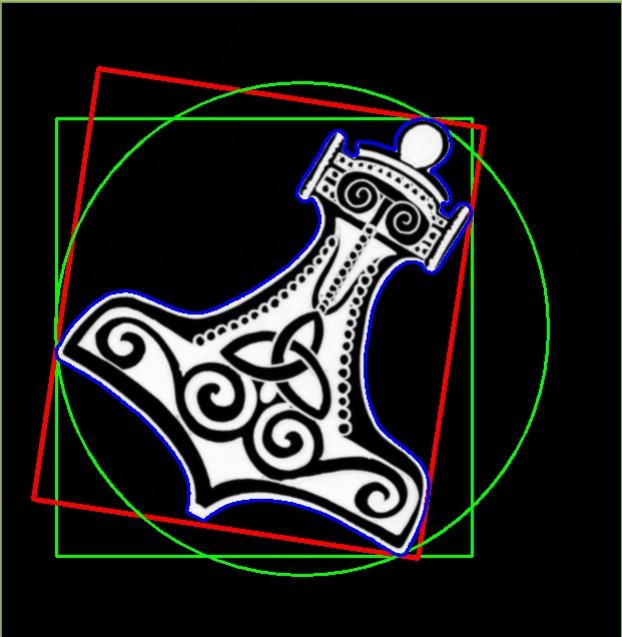
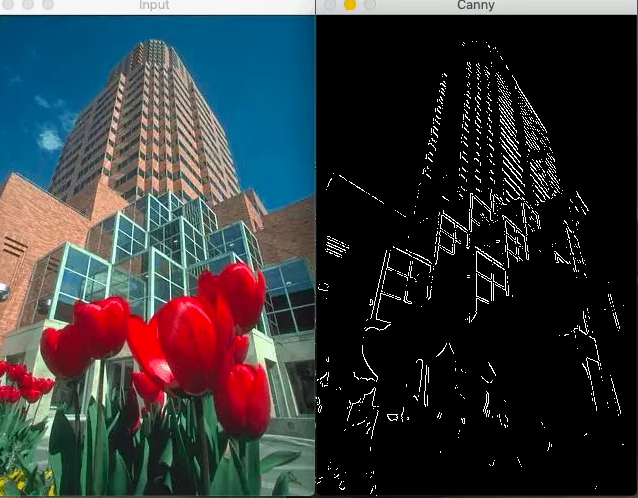
4)效果运行图三
5)效果运行图四
6)效果运行图五
六、Canny 边缘检测的问题
由于Canny边缘检测器只关注局部变化,没有语义(理解图像的内容)理解,精度有限(很多时候
是这样)。
Canny边缘检测器在这种情况下会失败,因为没有理解图像的上下文
语义理解对于边缘检测是至关重要的,这就是为什么使用机器学习或深度学习的基于学习的检
测器比canny边缘检测器产生更好的结果。
总结
好啦,本文写到这里就正式结束了哈!有想学习的小伙伴儿可以来找我一起学习哦~
✨完整的素材源码等:可以滴滴我吖!或者点击文末hao自取免费拿的哈~
🔨推荐往期文章——
项目0.1【Opencv实战】素描,要画出感觉,比如像这样画:画啥啥都好看(建议保存)
项目0.2项目0.3 【Opencv实战】美颜模式,开启:美颜功能都这么强大了嘛?(群魔乱舞.jpg)
项目0.4
【Opencv实战】刷爆朋友圈的特效“人物动漫化”是什么鬼?今天教你涨姿势—网友狂喜:我要学习,不许拦我
项目0.2【Opencv实战】废片变宝,怎样将照片调出烟雨油画的效果?试试这个特效,超赞
项目0.8 【超简单】利用Python去除图片水印,太神奇了叭,你还不会嘛?(附三种方法)
🎁文章汇总——
Python文章合集 | (入门到实战、游戏、Turtle、案例等)
(文章汇总还有更多你案例等你来学习啦~源码找我即可免费!)

![[附源码]Python计算机毕业设计Django校园运动会管理系统](https://img-blog.csdnimg.cn/3b9426cb92ee4597b741e30dcdd16e0c.png)



![[附源码]JAVA毕业设计砂石矿山管理系统(系统+LW)](https://img-blog.csdnimg.cn/b5c4c64c4e7a49fab7ca33bb905d49eb.png)