目录
环境安装
案例一:
案例二:
案例三:
案例四:
我的vs2022,window11
环境安装
看这个文章即可,博客很详细,按照这个没问题的
(5条消息) 【OSG】OSG环境部署 OSG3.6.5+vs2017+win10_x64(超详细)_osg环境配置_bailang_zhizun的博客-CSDN博客
我的osglogo没有地球,不过无所谓,反正vs代码运行牛和logo都正常。应该是资源路径问题。
补充文章:(5条消息) OSG-OpenSceneGraph在WIN10与VS2022下的部署(OSG3.6.5+VS2022+Win10_x64)个人笔记详细_vs2022 osg_食月的博客-CSDN博客
最快的入门方式就是实操案例
案例一:
牛在vs中的代码(release,x64)
(1)设置WIN32
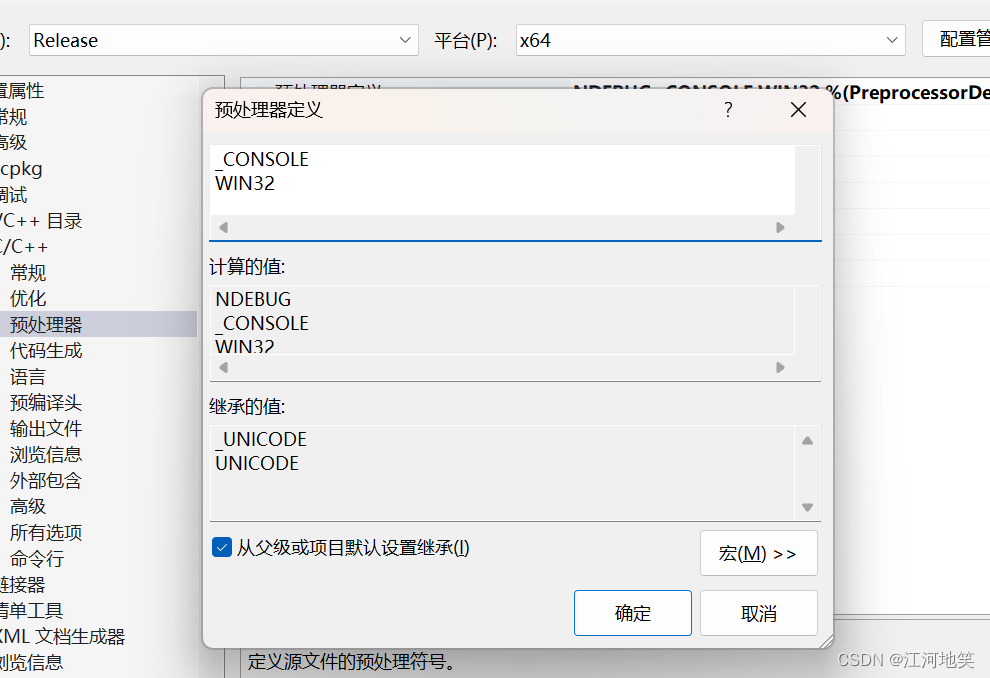
否则可能报错,这个案例可能不报错,下面的不加WIN32肯定报错。下图是不加WIN32

(2)设置include库
D:\CPlusProject\ThirdParty\OSG\build\include(3)设置链接器
D:\CPlusProject\ThirdParty\OSG\build\lib
osg.lib;osgDB.lib;osgUtil.lib;osgGA.lib;osgViewer.lib;osgText.lib;%(AdditionalDependencies)(4)代码
#include <Windows.h>
#include <osgViewer/Viewer>
#include <osgDB/ReadFile>
using namespace osg;
using namespace osgViewer;
using namespace osgDB;
int main(int argc, char* argv[])
{
osgViewer::Viewer viewer;
viewer.setSceneData(osgDB::readNodeFile("D:/CPlusProject/ThirdParty/OSG/Data/OpenSceneGraph-Data/cow.osg"));
return viewer.run();
}
(5)展示

案例二:
一个初步的带lod的案例
#include <string>
#include <iostream>
#include <osgViewer/Viewer>
#include <osgDB/ReadFile>
#include <osgDB/WriteFile>
#include <osg/Node>
#include <osg/Geode>
#include <osg/Group>
#include <osg/PagedLOD>
using namespace std;
int main() {
osg::ref_ptr<osg::LOD> lod = new osg::LOD();
lod->addChild(osgDB::readNodeFile("D:/CPlusProject/ThirdParty/OSG/Data/OpenSceneGraph-Data/glider.osg"), 0.0f, 20);
lod->addChild(osgDB::readNodeFile("D:/CPlusProject/ThirdParty/OSG/Data/OpenSceneGraph-Data/cessna.osg"), 20, 100);
lod->addChild(osgDB::readNodeFile("D:/CPlusProject/ThirdParty/OSG/Data/OpenSceneGraph-Data/clock.osgt"), 100, FLT_MAX);
osg::ref_ptr<osgViewer::Viewer> viewer = new osgViewer::Viewer;
osg::ref_ptr<osg::Group> sceneRoot = new osg::Group;
sceneRoot->addChild(lod.get());
viewer->setSceneData(sceneRoot);
return viewer->run();
}
运行结果:这是层级为二的飞机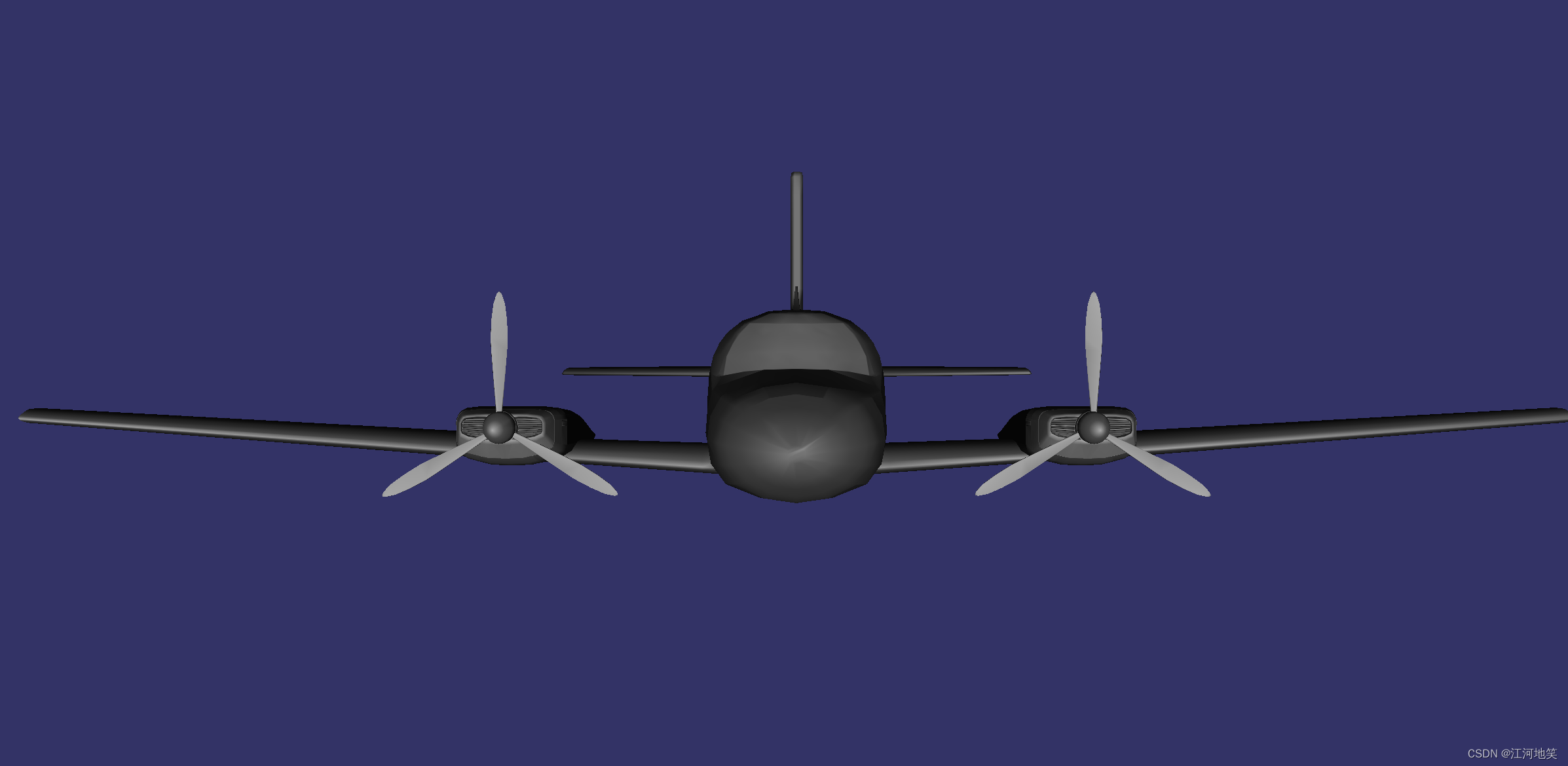
参考文档:(10条消息) 基于OSG讲解一下LOD_osg lod_微小的鱼的博客-CSDN博客
案例三:
两种lod显示方式
#include <string>
#include <iostream>
#include <osgViewer/Viewer>
#include <osgDB/ReadFile>
#include <osgDB/WriteFile>
#include <osg/Node>
#include <osg/Geode>
#include <osg/Group>
#include <osg/PagedLOD>
#include <osg/PositionAttitudeTransform>
osg::ref_ptr<osg::Node> CreateNode() {
osg::ref_ptr<osg::Group> _root = new osg::Group;
//创建牛模型
osg::ref_ptr<osg::Node> node1 = osgDB::readNodeFile("D:/CPlusProject/ThirdParty/OSG/Data/OpenSceneGraph-Data/cow.osg");
//创建滑翔机模型
osg::ref_ptr<osg::Node> node2 = osgDB::readNodeFile("D:/CPlusProject/ThirdParty/OSG/Data/OpenSceneGraph-Data/glider.osg");
//创建一个细节层次的节点LOD
osg::ref_ptr<osg::LOD> lode = new osg::LOD;
//添加子节点,在0到30的范围显示牛
lode->addChild(node1.get(), 0.0f, 30.0f);
//添加子节点,在30到100显示滑翔机
lode->addChild(node2.get(), 30.0f, 100.0f);
//创建一个细节层次节点LOD
osg::ref_ptr<osg::LOD> lode1 = new osg::LOD;
//按照像素大小来判断
lode1->setRangeMode(osg::LOD::PIXEL_SIZE_ON_SCREEN);
lode1->addChild(node1.get(), 0.0f, 1000.0f);
lode1->addChild(node2.get(), 1000.0f, 2000.0f);
//创建一个位置
osg::ref_ptr<osg::PositionAttitudeTransform> pat1 = new osg::PositionAttitudeTransform();
pat1->setPosition(osg::Vec3(-20.0f, 0.0f, 0.0f));
pat1->addChild(lode1.get());
_root->addChild(lode.get());
_root->addChild(pat1.get());
return _root.get();
}
using namespace std;
int main() {
osg::ref_ptr<osg::Node> node=CreateNode();
osgViewer::Viewer viewer;
viewer.setSceneData(node);
return viewer.run();
return 0;
}

可能有用的文章:
[原][osg][oe]分析一块倾斜摄影瓦片的数据 - 南水之源 - 博客园 (cnblogs.com)
OSG中距离转像素公式(PIXEL_SIZE_ON_SCREEN) - 代码天地 (codetd.com)
案例四:
osg::LOD会一次性载入所有模型进入内存,只是进行有选择的绘制而已。为了避免这种一次性加入内存的浪费行为,OpenSceneGraph提供了另外一种细节层次节点:分页细节层次节点osg::PagedLOD,PagedLOD继承自osg::LOD,可实现动态分页加载,可根据需要来加载模型文件,加载过程中有单独的线程负责实时调度和加载。
#include <string>
#include <iostream>
#include <osgViewer/Viewer>
#include <osgDB/ReadFile>
#include <osgDB/WriteFile>
#include <osg/Node>
#include <osg/Geode>
#include <osg/Group>
#include <osg/PagedLOD>
#include <osg/PositionAttitudeTransform>
osg::ref_ptr<osg::Node> CreateNode() {
osg::ref_ptr<osg::Group> _root = new osg::Group;
//创建牛模型
osg::ref_ptr<osg::Node> node1 = osgDB::readNodeFile("D:/CPlusProject/ThirdParty/OSG/Data/OpenSceneGraph-Data/cow.osg");
//创建滑翔机模型
osg::ref_ptr<osg::Node> node2 = osgDB::readNodeFile("D:/CPlusProject/ThirdParty/OSG/Data/OpenSceneGraph-Data/glider.osg");
//创建一个细节层次的节点PageLOD
osg::ref_ptr<osg::PagedLOD> lode = new osg::PagedLOD;
//添加子节点,在0到30的范围显示牛
lode->addChild(node1.get(), 0.0f, 30.0f);
//添加子节点,在30到100显示滑翔机
lode->addChild(node2.get(), 30.0f, 100.0f);
_root->addChild(lode.get());
return _root.get();
}
using namespace std;
int main() {
osg::ref_ptr<osg::Node> node=CreateNode();
osgViewer::Viewer viewer;
viewer.setSceneData(node);
return viewer.run();
return 0;
}