CVPR 2023
Co-SLAM: Joint Coordinate and Sparse Parametric Encodings for Neural Real-Time SLAM
input: RGB-D
contribution:
1.场景表示:多分辨率哈希网格(加速&保留高频特征)
2.编码方式:one-blob(提升未观察到区域的补全能力和一致性)编码方式根据场景表示(hash网格)制定
3.改进关键帧:支持在所有关键帧上执行BA
Related Work
iMap:由于实时性的要求,iMap使用系数采样和减少迭代次数提升效率,造成丢失高频细节&增大误差。
场景表示:如八叉树、哈希/体素网格等虽然可以提升效率,但缺乏MLP固有的平滑性和一致性先验,导致无法填补未观察到区域的空洞。如Nice-SLAM不能填补空洞,导致相机位姿出现漂移。
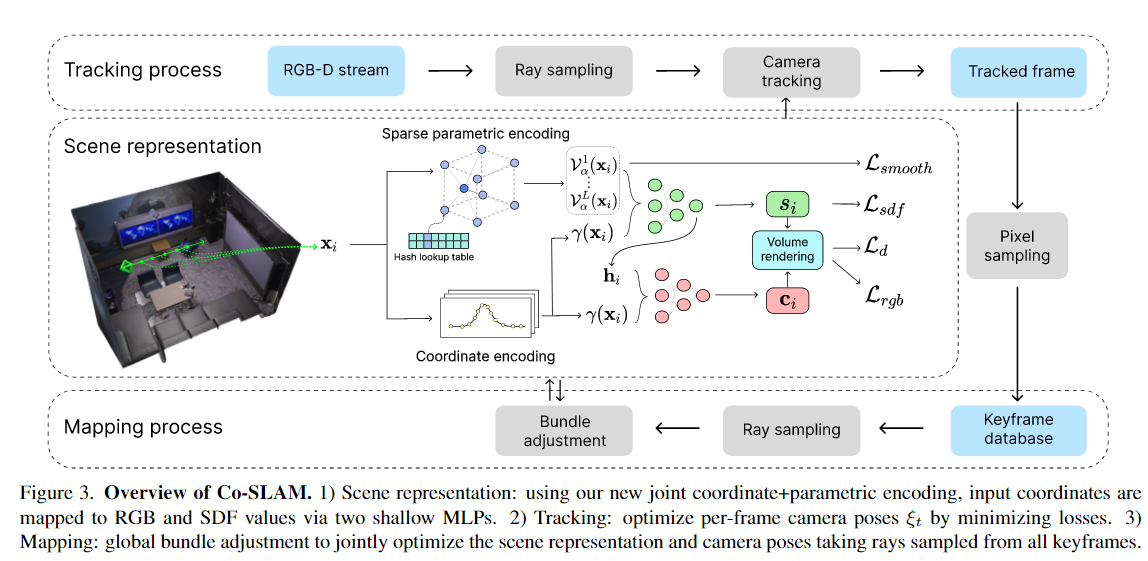
总体流程:
1)场景表示:联合坐标+参数编码-------MLP---------->RGB和SDF
2)tracking:最小化损失函数优化pose
3)mapping:从所有帧采样的全局射线进行全局BA,联合优化map&pose