MM32F3273G8P火龙果开发板MindSDK开发教程20 - letter shell 的移植
1、Letter Shell
犹如linux下的命令行,或者更像是uboot下的命令行,可以输入命令,执行相对应的函数。
2、Letter Shell移植(GCC 环境)
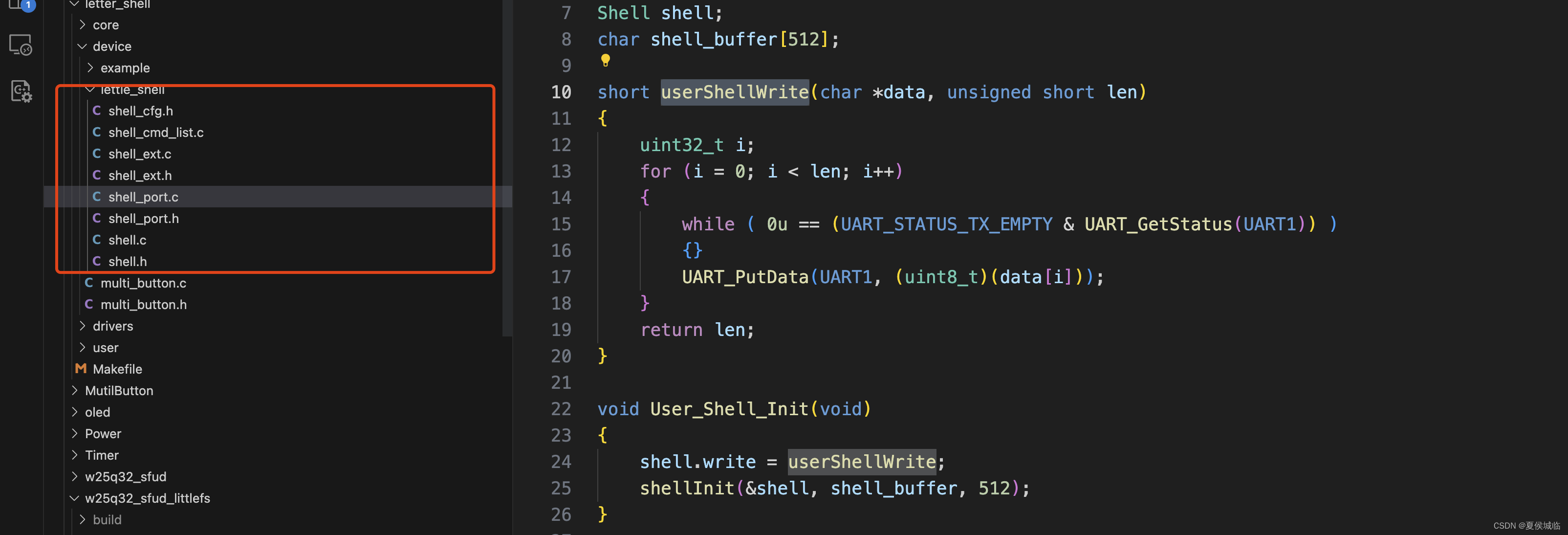
解压后,将相关文件拷贝到我们的工程,并新建shell_port.c shell_prot.h文件,整体代码视图如下:
shell_prot.c里面主要完成一个write函数,read函数我们不在这里定义,我们在串口收数据的中断里,调用
shellHandler函数。所以在串口的初始化中,要使能串口的收中断。
a、串口初始化函数
static void BOARD_InitUartPins(void)
{
/* Pb6 - UART1_TX. */
GPIO_Init_Type gpio_init;
gpio_init.Pins = CONSOLE_TX_GPIO_PIN;
gpio_init.PinMode = GPIO_PinMode_AF_PushPull;
gpio_init.Speed = GPIO_Speed_50MHz;
GPIO_Init(CONSOLE_GPIO_PORT, &gpio_init);
GPIO_PinAFConf(CONSOLE_GPIO_PORT, gpio_init.Pins, GPIO_AF_7);
/* Pb7 - UART1_RX. */
gpio_init.Pins = CONSOLE_RX_GPIO_PIN;
gpio_init.PinMode = GPIO_PinMode_In_Floating;
gpio_init.Speed = GPIO_Speed_50MHz;
GPIO_Init(CONSOLE_GPIO_PORT, &gpio_init);
GPIO_PinAFConf(CONSOLE_GPIO_PORT, gpio_init.Pins, GPIO_AF_7);
}
void BOARD_InitDebugConsole(void)
{
UART_Init_Type uart_init;
BOARD_InitUartPins();
uart_init.ClockFreqHz = CLOCK_APB2_FREQ;
uart_init.BaudRate = 115200U;
uart_init.WordLength = UART_WordLength_8b;
uart_init.StopBits = UART_StopBits_1;
uart_init.Parity = UART_Parity_None;
uart_init.XferMode = UART_XferMode_RxTx;
uart_init.HwFlowControl = UART_HwFlowControl_None;
uart_init.XferSignal = UART_XferSignal_Normal;
uart_init.EnableSwapTxRxXferSignal = false;
UART_Init(BOARD_DEBUG_UART_PORT, &uart_init);
/* Enable RX interrupt. */
UART_EnableInterrupts(BOARD_DEBUG_UART_PORT, UART_INT_RX_DONE, true);
NVIC_EnableIRQ(UART1_IRQn);
UART_Enable(BOARD_DEBUG_UART_PORT, true);
}
b、中断处理函数
uint8_t recv_buf = 0;
void app_uart_rx_isr_hook(void)
{
if ( (0u != (UART_INT_RX_DONE & UART_GetEnabledInterrupts(BOARD_DEBUG_UART_PORT)))
&& (0u != (UART_INT_RX_DONE & UART_GetInterruptStatus(BOARD_DEBUG_UART_PORT))) )
{
recv_buf = UART_GetData(BOARD_DEBUG_UART_PORT); /* read data to clear rx interrupt bits. */
//调用shell处理数据的接口
shellHandler(&shell, recv_buf);
}
}
/* BOARD_DEBUG_UART_IRQHandler ISR entry. */
void UART1_IRQHandler(void)
{
app_uart_rx_isr_hook();
}
c、shell_port.c中完善写函数
#include "shell_port.h"
#include "shell.h"
#include "hal_uart.h"
#include "shell_port.h"
Shell shell;
char shell_buffer[512];
short userShellWrite(char *data, unsigned short len)
{
uint32_t i;
for (i = 0; i < len; i++)
{
while ( 0u == (UART_STATUS_TX_EMPTY & UART_GetStatus(UART1)) )
{}
UART_PutData(UART1, (uint8_t)(data[i]));
}
return len;
}
void User_Shell_Init(void)
{
shell.write = userShellWrite;
shellInit(&shell, shell_buffer, 512);
}
其中write定义 signed short (*write)(char *, unsigned short);
shell_cfg.h内容如下:
/**
* @file shell_cfg.h
* @author Letter (nevermindzzt@gmail.com)
* @brief shell config
* @version 3.0.0
* @date 2019-12-31
*
* @copyright (c) 2019 Letter
*
*/
#ifndef __SHELL_CFG_H__
#define __SHELL_CFG_H__
/**
* @brief 是否使用默认shell任务while循环,使能宏`SHELL_USING_TASK`后此宏有意义
* 使能此宏,则`shellTask()`函数会一直循环读取输入,一般使用操作系统建立shell
* 任务时使能此宏,关闭此宏的情况下,一般适用于无操作系统,在主循环中调用`shellTask()`
*/
#define SHELL_TASK_WHILE 0
/**
* @brief 是否使用命令导出方式
* 使能此宏后,可以使用`SHELL_EXPORT_CMD()`等导出命令
* 定义shell命令,关闭此宏的情况下,需要使用命令表的方式
*/
#define SHELL_USING_CMD_EXPORT 1
/**
* @brief 是否使用shell伴生对象
* 一些扩展的组件(文件系统支持,日志工具等)需要使用伴生对象
*/
#define SHELL_USING_COMPANION 0
/**
* @brief 支持shell尾行模式
*/
#define SHELL_SUPPORT_END_LINE 0
/**
* @brief 是否在输出命令列表中列出用户
*/
#define SHELL_HELP_LIST_USER 0
/**
* @brief 是否在输出命令列表中列出变量
*/
#define SHELL_HELP_LIST_VAR 0
/**
* @brief 是否在输出命令列表中列出按键
*/
#define SHELL_HELP_LIST_KEY 0
/**
* @brief 是否在输出命令列表中展示命令权限
*/
#define SHELL_HELP_SHOW_PERMISSION 0//1
/**
* @brief 使用LF作为命令行回车触发
* 可以和SHELL_ENTER_CR同时开启
*/
#define SHELL_ENTER_LF 0//1
/**
* @brief 使用CR作为命令行回车触发
* 可以和SHELL_ENTER_LF同时开启
*/
#define SHELL_ENTER_CR 1
/**
* @brief 使用CRLF作为命令行回车触发
* 不可以和SHELL_ENTER_LF或SHELL_ENTER_CR同时开启
*/
#define SHELL_ENTER_CRLF 0
/**
* @brief 使用执行未导出函数的功能
* 启用后,可以通过`exec [addr] [args]`直接执行对应地址的函数
* @attention 如果地址错误,可能会直接引起程序崩溃
*/
#define SHELL_EXEC_UNDEF_FUNC 0
/**
* @brief shell命令参数最大数量
* 包含命令名在内,超过16个参数并且使用了参数自动转换的情况下,需要修改源码
*/
#define SHELL_PARAMETER_MAX_NUMBER 8
/**
* @brief 历史命令记录数量
*/
#define SHELL_HISTORY_MAX_NUMBER 5
/**
* @brief 双击间隔(ms)
* 使能宏`SHELL_LONG_HELP`后此宏生效,定义双击tab补全help的时间间隔
*/
#define SHELL_DOUBLE_CLICK_TIME 0//200
/**
* @brief 快速帮助
* 作用于双击tab的场景,当使能此宏时,双击tab不会对命令进行help补全,而是直接显示对应命令的帮助信息
*/
#define SHELL_QUICK_HELP 0//1
/**
* @brief 保存命令返回值
* 开启后会默认定义一个`RETVAL`变量,会保存上一次命令执行的返回值,可以在随后的命令中进行调用
* 如果命令的`SHELL_CMD_DISABLE_RETURN`标志被设置,则该命令不会更新`RETVAL`
*/
#define SHELL_KEEP_RETURN_VALUE 0
/**
* @brief 管理的最大shell数量
*/
#define SHELL_MAX_NUMBER 5
/**
* @brief shell格式化输出的缓冲大小
* 为0时不使用shell格式化输出
*/
#define SHELL_PRINT_BUFFER 128
/**
* @brief shell格式化输入的缓冲大小
* 为0时不使用shell格式化输入
* @note shell格式化输入会阻塞shellTask, 仅适用于在有操作系统的情况下使用
*/
#define SHELL_SCAN_BUFFER 0
/**
* @brief 获取系统时间(ms)
* 定义此宏为获取系统Tick,如`HAL_GetTick()`
* @note 此宏不定义时无法使用双击tab补全命令help,无法使用shell超时锁定
*/
#define SHELL_GET_TICK() 0
/**
* @brief 使用锁
* @note 使用shell锁时,需要对加锁和解锁进行实现
*/
#define SHELL_USING_LOCK 0
/**
* @brief shell内存分配
* shell本身不需要此接口,若使用shell伴生对象,需要进行定义
*/
#define SHELL_MALLOC(size) 0
/**
* @brief shell内存释放
* shell本身不需要此接口,若使用shell伴生对象,需要进行定义
*/
#define SHELL_FREE(obj) 0
/**
* @brief 是否显示shell信息
*/
#define SHELL_SHOW_INFO 1
/**
* @brief 是否在登录后清除命令行
*/
#define SHELL_CLS_WHEN_LOGIN 1
/**
* @brief shell默认用户
*/
#define SHELL_DEFAULT_USER "Max"
/**
* @brief shell默认用户密码
* 若默认用户不需要密码,设为""
*/
#define SHELL_DEFAULT_USER_PASSWORD ""
/**
* @brief shell自动锁定超时
* shell当前用户密码有效的时候生效,超时后会自动重新锁定shell
* 设置为0时关闭自动锁定功能,时间单位为`SHELL_GET_TICK()`单位
* @note 使用超时锁定必须保证`SHELL_GET_TICK()`有效
*/
#define SHELL_LOCK_TIMEOUT 0//0 * 60 * 1000
#endif
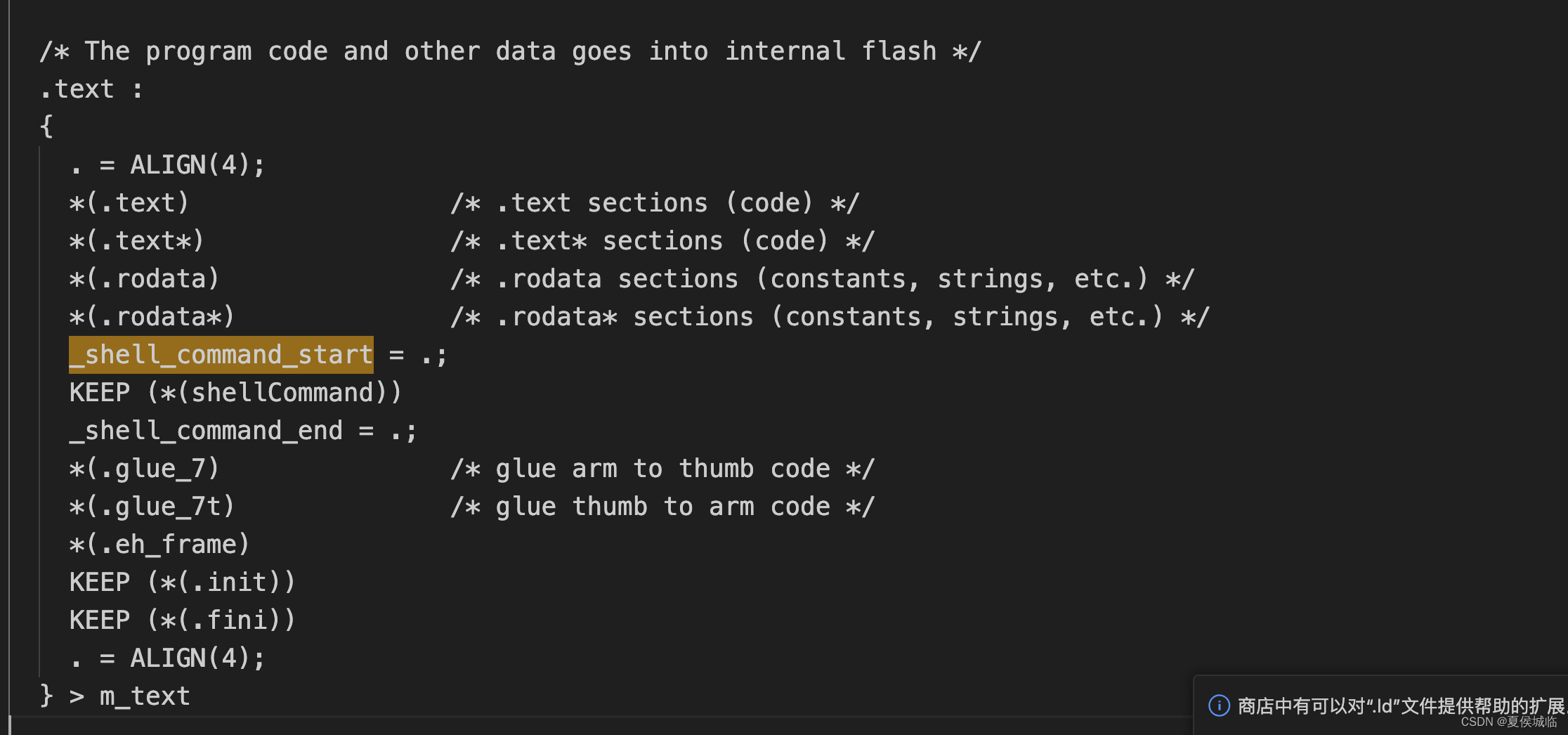
其中 #define SHELL_USING_CMD_EXPORT 1时编译报错,要修改Ld文件如下:
shell_port.h内容如下:
#ifndef __SHELL_PORT_H__
#define __SHELL_PORT_H__
#include "shell.h"
extern Shell shell;
void User_Shell_Init(void);
#endif
3、调用以及现象
在main函数中调用代码如下:
#include <stdint.h>
#include <stdio.h>
#include "clock_init.h"
#include "hal_rcc.h"
#include "hal_gpio.h"
#include "hal_uart.h"
#include "led.h"
#include "uart.h"
#include "systick.h"
#include "key.h"
#include "timer.h"
#include "multi_button.h"
#include "shell_port.h"
struct Button btn1;
void BTN1_PRESS_DOWN_Handler(void* btn)
{
//do something...
printf("BTN1_PRESS_DOWN_Handler \r\n");
}
void BTN1_PRESS_UP_Handler(void* btn)
{
//do something...
printf("BTN1_PRESS_UP_Handler \r\n");
}
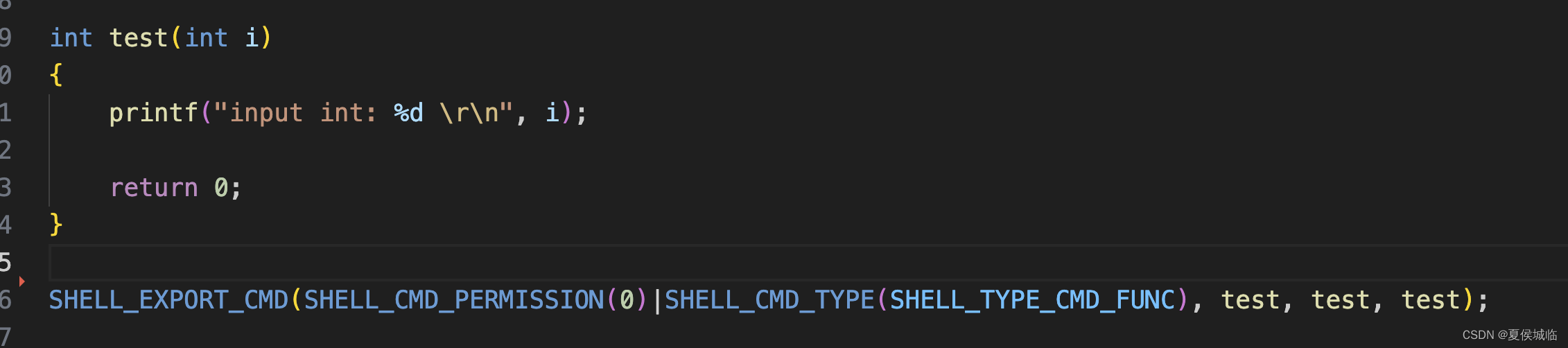
int test(int i)
{
printf("input int: %d \r\n", i);
return 0;
}
SHELL_EXPORT_CMD(SHELL_CMD_PERMISSION(0)|SHELL_CMD_TYPE(SHELL_TYPE_CMD_FUNC), test, test, test);
int main(void)
{
BOARD_InitBootClocks(); // ³õʼ»¯Ê±ÖÓ
BOARD_InitDebugConsole();
BOARD_UserKeyInit();
LED_Init();
BOARD_TIM6_Init();
// for mutilbutton init
button_init(&btn1, read_button_GPIO, 0, btn1_id);
button_attach(&btn1, PRESS_DOWN, BTN1_PRESS_DOWN_Handler);
button_attach(&btn1, PRESS_UP, BTN1_PRESS_UP_Handler);
button_start(&btn1);
BOARD_TIM7_Init();
BOARD_Delay1Ms(1000);
User_Shell_Init();
while(1)
{
}
}
我们添加了一个test命令,如下:
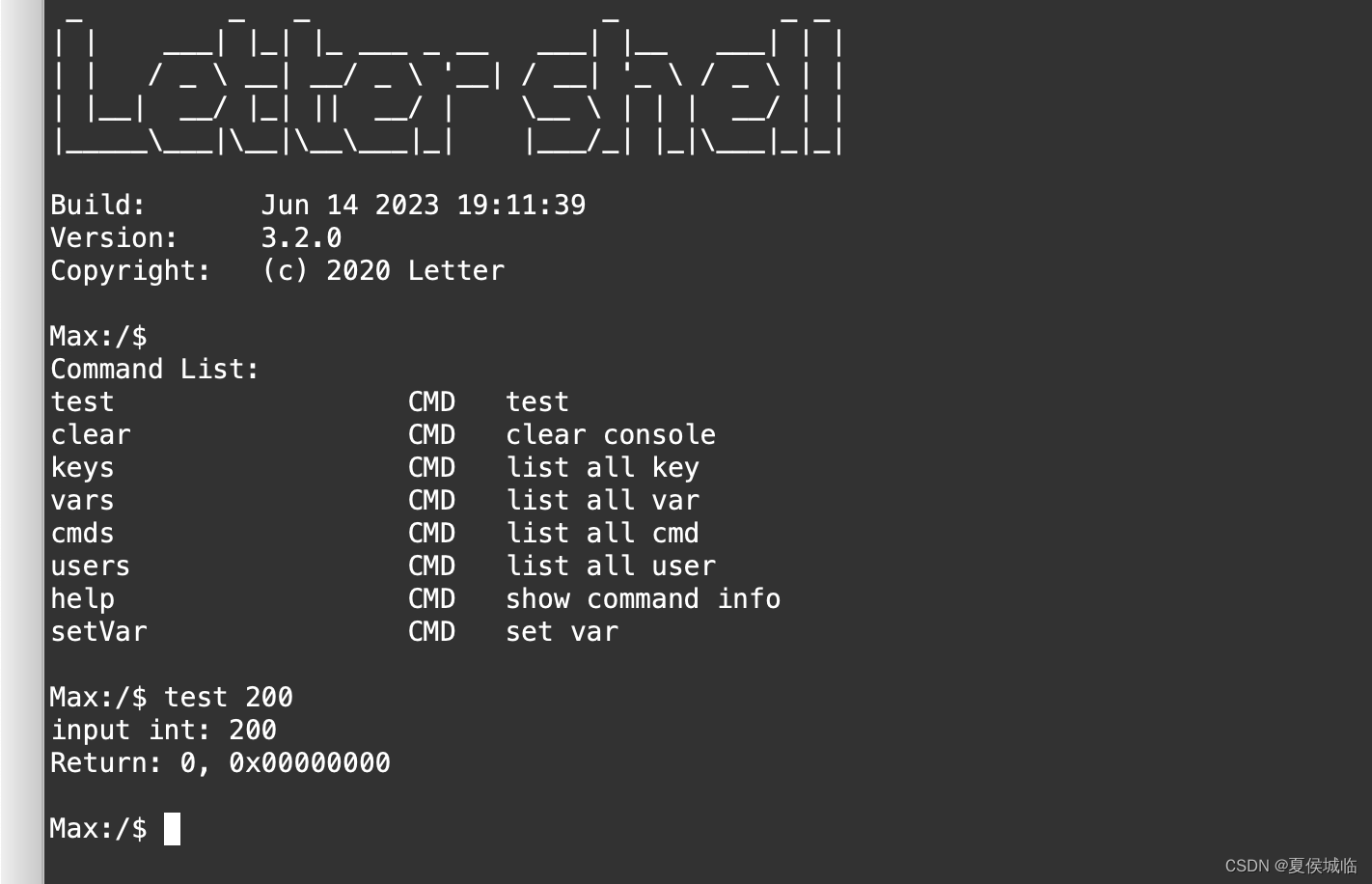
现象:
4、代码
代码下载