目录
1.算法描述
2.仿真效果预览
3.MATLAB核心程序
4.完整MATLAB
1.算法描述
k-d树是每个节点都为k维点的二叉树。所有非叶子节点可以视作用一个超平面把空间分割成两个半空间。节点左边的子树代表在超平面左边的点,节点右边的子树代表在超平面右边的点。选择超平面的方法如下:每个节点都与k维中垂直于超平面的那一维有关。因此,如果选择按照x轴划分,所有x值小于指定值的节点都会出现在左子树,所有x值大于指定值的节点都会出现在右子树。这样,超平面可以用该x值来确定,其法线为x轴的单位向量。
1.对KDtree的理解
首先要知道KDtree的用处,KDtree是用来进行多维数点的,一般这些点都是在在而二维及二维以上,因为一维上的问题,我们基本都可以运用线段树来解决。我对KDtree的理解就是一个自带剪枝的暴力,并且这个剪枝因为我们对这些多维上的点的较优秀的排列而显得十分有用。
2.前置知识
在学习KDtree之前要先知道并会运用西面三个知识点:
1) 首先,要会建二叉搜索树,因为整个KDtree就是一颗二叉搜索树。
2) 还需要知道什么事估价函数,因为剪枝的时候要运用到估价函数。
3) 对空间的想象能力,因为KDtree是处理图形上的问题,所以还需要有一定的空间想象能力。
3.KDTree的讲解
因为KDtree是一种优美的暴力,并且我们要在上面剪枝,所以我们自然想让每一次剪枝,剪下去尽可能大的部分,所以我们能想到每一次将区间等大的分割,既然要的等大的分割,又要是二叉搜索树,我们就要让中间值作为当前节点,所有比它小的都放在它的左面,比它大的都放在它的右面。
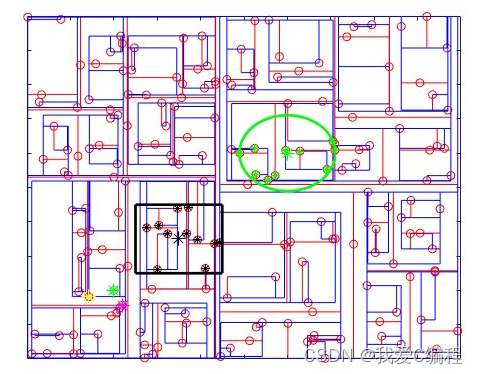
2.仿真效果预览
matlab2022a仿真如下:
3.MATLAB核心程序
demo_case = [1,2,3,4];
plot_stuff=1; % 1 if you want to plot the data
% change to 0 if you donot want to plot anything.
if (plot_stuff) close all; end
clc
rand('seed',1)
dimen=2;
X=rand(200,dimen);
point=0.2*ones(1,dimen);
disp('##### Build Tree #####');
tree = kd_buildtree(X,plot_stuff);
for count=1:max(size(demo_case))
switch demo_case(count)
case 1
if (plot_stuff); hold on ; end
if (plot_stuff); plot(point(1),point(2),'g*','MarkerSize',10); end
disp('##### Closest Point Fast #####');
[index_vals,vec_vals,node_number] = kd_closestpointfast(tree,point)
if (plot_stuff); plot(X(index_vals,1),X(index_vals,2),'y*','MarkerSize',10); end
case 2
if (plot_stuff); hold on ; end
if (plot_stuff); plot(point(1),point(2),'go'); end
disp('##### Closest Point Good #####');
[index_vals,vec_vals,node_number] = kd_closestpointgood(tree,point)
if (plot_stuff); plot(X(index_vals,1),X(index_vals,2),'m*','MarkerSize',10); end
case 3
point=0.6*ones(1,dimen);
if (plot_stuff); hold on ; end
if (plot_stuff); plot(point(1),point(2),'g*','MarkerSize',10); end
disp('##### N Closest Points #####');
num_of_points=10;
[index_vals,dist_vals,vec_vals] = kd_knn(tree,point,num_of_points,plot_stuff)
if (plot_stuff);
plot(X(index_vals,1),X(index_vals,2),'g*');
dist=sqrt(sum((point-X(index_vals(end),1:2)).^2));
plot(point(1)+dist*cos(0:0.1:2*pi),point(2)+dist*sin(0:0.1:2*pi),'g-','LineWidth',2)
end
case 4
disp('##### Range Query #####');
point=0.35*ones(1,dimen);
range=[-0.1*ones(1,dimen); 0.1*ones(1,dimen)];
[index_vals,dist_vals,vector_vals] = kd_rangequery(tree,point,range)
%%% plotting stuff
if (plot_stuff);
a=point+range(1,:);
b=point+range(2,:);
c=[a(1) a(1) b(1) b(1);a(1) b(1) b(1) a(1)];
d=[a(2) b(2) b(2) a(2);b(2) b(2) a(2) a(2)];
plot(point(1),point(2),'k*','MarkerSize',10)
line(c,d, 'color', 'k','LineWidth',2);
plot(X(index_vals,1),X(index_vals,2),'k*')
end
end
end
if (plot_stuff);
set(gca,'box','on');
set(gca,'XTickLabel',[]);
set(gca,'YTickLabel',[]);
end
A934.完整MATLAB
V



![[附源码]计算机毕业设计人事管理系统Springboot程序](https://img-blog.csdnimg.cn/ff240d3a345746699dd65cc0ae4eaa36.png)