STM32F407硬件I2C实现MPU6050通讯
文章目录
- STM32F407硬件I2C实现MPU6050通讯
- cubeide设置
- 写操作与读操作函数实现
- 复位,读取温度,角度等函数封装
- mpu6050.c
- mpu6050.h
- 代码分析
- DMP移植
- 1.修改头文件路径为自己的头文件路径
- 2.修改I2C读写函数为自己mcu平台的读写函数
- 3.修改延时函数为自己平台的延时函数
- 4.修改MPU6050的地址
- 使用举例
工程代码
https://download.csdn.net/download/weixin_52849254/87886714
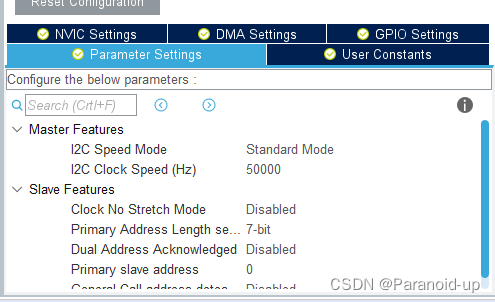
cubeide设置
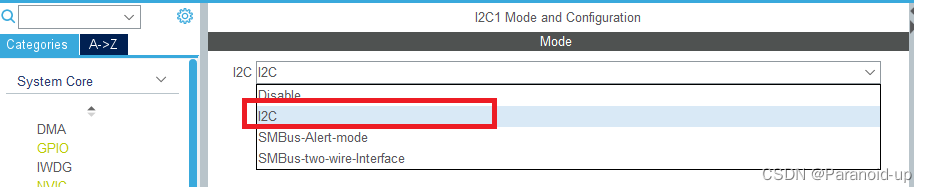
I2C1通道可选择三种不同的通讯协议:I2C、SMBus-Alert-mode、SMBus-two-wire-Interface。
SMBus (System Management Bus,系统管理总线), 为系统和电源管理这样的任务提供了一条控制总线,SMBus与I2C总线之间在时序特性上存在一些差别
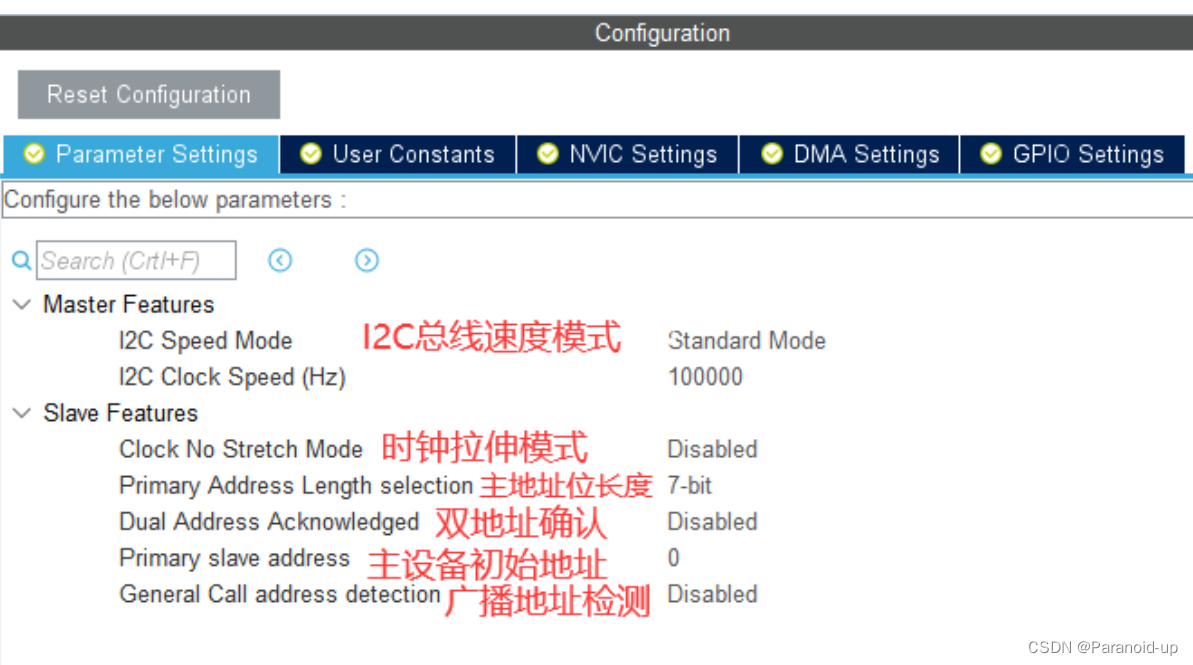
修改速度为50000
写操作与读操作函数实现
/**
* @brief Manages error callback by re-initializing I2C.
* @param Addr: I2C Address
* @retval None
*/
static void I2Cx_Error(uint8_t Addr)
{
/* 恢复I2C寄存器为默认值 */
HAL_I2C_DeInit(&hi2c1);
/* 重新初始化I2C外设 */
MX_I2C1_Init();
}
/**
* @brief 写寄存器,这是提供给上层的接口
* @param slave_addr: 从机地址
* @param reg_addr:寄存器地址
* @param len:写入的长度
* @param data_ptr:指向要写入的数据
* @retval 正常为0,不正常为非0
*/
int Sensors_I2C_WriteRegister(uint8_t slave_addr,
uint8_t reg_addr,
uint8_t len,
uint8_t *data_ptr)
{
HAL_StatusTypeDef status = HAL_OK;
status = HAL_I2C_Mem_Write(&hi2c1, slave_addr, reg_addr, I2C_MEMADD_SIZE_8BIT,data_ptr, len,I2Cx_FLAG_TIMEOUT);
/* 检查通讯状态 */
if(status != HAL_OK)
{
/* 总线出错处理 */
I2Cx_Error(slave_addr);
}
while (HAL_I2C_GetState(&hi2c1) != HAL_I2C_STATE_READY)
{
}
/* 检查SENSOR是否就绪进行下一次读写操作 */
while (HAL_I2C_IsDeviceReady(&hi2c1, slave_addr, I2Cx_FLAG_TIMEOUT, I2Cx_FLAG_TIMEOUT) == HAL_TIMEOUT);
/* 等待传输结束 */
while (HAL_I2C_GetState(&hi2c1) != HAL_I2C_STATE_READY)
{
}
return status;
}
/**
* @brief 读寄存器,这是提供给上层的接口
* @param slave_addr: 从机地址
* @param reg_addr:寄存器地址
* @param len:要读取的长度
* @param data_ptr:指向要存储数据的指针
* @retval 正常为0,不正常为非0
*/
int Sensors_I2C_ReadRegister(uint8_t slave_addr,
uint8_t reg_addr,
uint8_t len,
uint8_t *data_ptr)
{
HAL_StatusTypeDef status = HAL_OK;
status =HAL_I2C_Mem_Read(&hi2c1,slave_addr,reg_addr,I2C_MEMADD_SIZE_8BIT,data_ptr,len,I2Cx_FLAG_TIMEOUT);
/* 检查通讯状态 */
if(status != HAL_OK)
{
/* 总线出错处理 */
I2Cx_Error(slave_addr);
}
while (HAL_I2C_GetState(&hi2c1) != HAL_I2C_STATE_READY)
{
}
/* 检查SENSOR是否就绪进行下一次读写操作 */
while (HAL_I2C_IsDeviceReady(&hi2c1, slave_addr, I2Cx_FLAG_TIMEOUT, I2Cx_FLAG_TIMEOUT) == HAL_TIMEOUT);
/* 等待传输结束 */
while (HAL_I2C_GetState(&hi2c1) != HAL_I2C_STATE_READY)
{
}
return status;
}
这段代码是关于使用I2C进行寄存器读写的函数实现。
首先,代码中定义了一个静态函数I2Cx_Error,用于处理I2C出错的情况。在函数中,首先通过调用HAL_I2C_DeInit函数将I2C寄存器恢复为默认值,然后调用MX_I2C1_Init函数重新初始化I2C外设。
接下来,代码包含了两个函数Sensors_I2C_WriteRegister和Sensors_I2C_ReadRegister,分别用于写寄存器和读寄存器操作。
Sensors_I2C_WriteRegister函数用于向从设备写入数据。它接受从设备地址(slave_addr)、寄存器地址(reg_addr)、要写入的数据长度(len)和指向要写入数据的指针(data_ptr)作为参数。在函数中,通过调用HAL_I2C_Mem_Write函数进行I2C的内存写操作。如果通信状态不正常,即status不等于HAL_OK,则调用I2Cx_Error函数进行错误处理。然后,通过循环等待I2C传输完成,并检查SENSOR是否就绪进行下一次读写操作。
Sensors_I2C_ReadRegister函数用于从从设备读取数据。它接受从设备地址(slave_addr)、寄存器地址(reg_addr)、要读取的数据长度(len)和指向存储数据的指针(data_ptr)作为参数。在函数中,通过调用HAL_I2C_Mem_Read函数进行I2C的内存读操作。如果通信状态不正常,即status不等于HAL_OK,则调用I2Cx_Error函数进行错误处理。然后,通过循环等待I2C传输完成,并检查SENSOR是否就绪进行下一次读写操作。
最后,函数返回status表示操作的状态。
综上所述,这段代码实现了使用I2C进行寄存器读写的功能,并在通信出错时进行了错误处理。
复位,读取温度,角度等函数封装
mpu6050.c
#include "mpu6050.h"
#include "usart.h"
#include "i2c.h"
#include "main.h"
#define MPU_ERROR I2C_ERROR
#define MPU_INFO I2C_INFO
/**
* @brief 写数据到MPU6050寄存器
* @param reg_add:寄存器地址
* @param reg_data:要写入的数据
* @retval
*/
void MPU6050_WriteReg(uint8_t reg_add,uint8_t reg_dat)
{
Sensors_I2C_WriteRegister(MPU6050_ADDRESS,reg_add,1,®_dat);
}
/**
* @brief 从MPU6050寄存器读取数据
* @param reg_add:寄存器地址
* @param Read:存储数据的缓冲区
* @param num:要读取的数据量
* @retval
*/
void MPU6050_ReadData(uint8_t reg_add,unsigned char* Read,uint8_t num)
{
Sensors_I2C_ReadRegister(MPU6050_ADDRESS,reg_add,num,Read);
}
/**
* @brief 往MPU6050的指定寄存器写入一字节数据
* @param addr: MPU6050的IIC通讯地址
* reg : MPU6050寄存器地址
* dat : 写入的数据
* @retval MPU6050_EOK : 函数执行成功
* MPU6050_EACK: IIC通讯ACK错误,函数执行失败
*/
uint8_t mpu6050_write_byte(uint8_t addr, uint8_t reg, uint8_t dat)
{
return Sensors_I2C_WriteRegister(addr, reg, 1, &dat);
}
/**
* @brief 读取MPU6050指定寄存器的值
* @param addr: MPU6050的IIC通讯地址
* reg : MPU6050寄存器地址
* dat: 读取到的寄存器的值
* @retval MPU6050_EOK : 函数执行成功
* MPU6050_EACK: IIC通讯ACK错误,函数执行失败
*/
uint8_t mpu6050_read_byte(uint8_t addr, uint8_t reg, uint8_t *dat)
{
return Sensors_I2C_ReadRegister(addr, reg, 1, dat);
}
/**
* @brief 初始化MPU6050芯片
* @param
* @retval
*/
void MPU6050_Init(void)
{
//在初始化之前要延时一段时间,若没有延时,则断电后再上电数据可能会出错
Delay(100);
MPU6050_WriteReg(MPU6050_RA_PWR_MGMT_1, 0x00); //解除休眠状态
MPU6050_WriteReg(MPU6050_RA_SMPLRT_DIV , 0x07); //陀螺仪采样率
MPU6050_WriteReg(MPU6050_RA_CONFIG , 0x06);
MPU6050_WriteReg(MPU6050_RA_ACCEL_CONFIG , 0x01); //配置加速度传感器工作在4G模式
MPU6050_WriteReg(MPU6050_RA_GYRO_CONFIG, 0x18); //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
Delay(200);
}
/**
* @brief 读取MPU6050的ID
* @param
* @retval 正常返回1,异常返回0
*/
uint8_t MPU6050ReadID(void)
{
unsigned char Re = 0;
MPU6050_ReadData(MPU6050_RA_WHO_AM_I,&Re,1); //读器件地址
printf("Re = %x\r\n",Re);
if(Re != 0x68)
{
MPU_ERROR("MPU6050 dectected error!\r\n检测不到MPU6050模块,请检查模块与开发板的接线");
return 0;
}
else
{
MPU_INFO("MPU6050 ID = %d\r\n",Re);
return 1;
}
}
/**
* @brief 读取MPU6050的加速度数据
* @param
* @retval
*/
void MPU6050ReadAcc(short *accData)
{
uint8_t buf[6];
MPU6050_ReadData(MPU6050_ACC_OUT, buf, 6);
accData[0] = (buf[0] << 8) | buf[1];
accData[1] = (buf[2] << 8) | buf[3];
accData[2] = (buf[4] << 8) | buf[5];
}
/**
* @brief 读取MPU6050的角加速度数据
* @param
* @retval
*/
void MPU6050ReadGyro(short *gyroData)
{
uint8_t buf[6];
MPU6050_ReadData(MPU6050_GYRO_OUT,buf,6);
gyroData[0] = (buf[0] << 8) | buf[1];
gyroData[1] = (buf[2] << 8) | buf[3];
gyroData[2] = (buf[4] << 8) | buf[5];
}
/**
* @brief 读取MPU6050的原始温度数据
* @param
* @retval
*/
void MPU6050ReadTemp(short *tempData)
{
uint8_t buf[2];
MPU6050_ReadData(MPU6050_RA_GYRO_XOUT_H,buf,2); //读取温度值
*tempData = (buf[0] << 8) | buf[1];
}
/**
* @brief 读取MPU6050的温度数据,转化成摄氏度
* @param
* @retval
*/
void MPU6050_ReturnTemp(float *Temperature)
{
short temp3;
uint8_t buf[2];
MPU6050_ReadData(MPU6050_RA_GYRO_XOUT_H,buf,2); //读取温度值
temp3= (buf[0] << 8) | buf[1];
*Temperature=((double) temp3/340.0)+36.53;
}
/**
* @brief MPU6050软件复位
* @param 无
* @retval 无
*/
void mpu6050_sw_reset(void)
{
mpu6050_write_byte(MPU6050_ADDRESS, MPU6050_RA_PWR_MGMT_1, 0x80);
HAL_Delay(100);
mpu6050_write_byte(MPU6050_ADDRESS, MPU6050_RA_PWR_MGMT_1, 0x00);
}
/**
* @brief MPU6050设置陀螺仪传感器量程范围
* @param frs: 0 --> ±250dps
* 1 --> ±500dps
* 2 --> ±1000dps
* 3 --> ±2000dps
* @retval MPU6050_EOK : 函数执行成功
* MPU6050_EACK: IIC通讯ACK错误,函数执行失败
*/
uint8_t mpu6050_set_gyro_fsr(uint8_t fsr)
{
return mpu6050_write_byte(MPU6050_ADDRESS, MPU6050_RA_GYRO_CONFIG, fsr << 3);
}
/**
* @brief MPU6050设置加速度传感器量程范围
* @param frs: 0 --> ±2g
* 1 --> ±4g
* 2 --> ±8g
* 3 --> ±16g
* @retval MPU6050_EOK : 函数执行成功
* MPU6050_EACK: IIC通讯ACK错误,函数执行失败
*/
uint8_t mpu6050_set_accel_fsr(uint8_t fsr)
{
return mpu6050_write_byte(MPU6050_ADDRESS, MPU6050_RA_ACCEL_CONFIG, fsr << 3);
}
/**
* @brief MPU6050设置数字低通滤波器频率
* @param lpf: 数字低通滤波器的频率(Hz)
* @retval MPU6050_EOK : 函数执行成功
* MPU6050_EACK: IIC通讯ACK错误,函数执行失败
*/
uint8_t mpu6050_set_lpf(uint16_t lpf)
{
uint8_t dat;
if (lpf >= 188)
{
dat = 1;
}
else if (lpf >= 98)
{
dat = 2;
}
else if (lpf >= 42)
{
dat = 3;
}
else if (lpf >= 20)
{
dat = 4;
}
else if (lpf >= 10)
{
dat = 5;
}
else
{
dat = 6;
}
return mpu6050_write_byte(MPU6050_ADDRESS, MPU6050_RA_CONFIG, dat);
}
/**
* @brief MPU6050设置采样率
* @param rate: 采样率(4~1000Hz)
* @retval MPU6050_EOK : 函数执行成功
* MPU6050_EACK: IIC通讯ACK错误,函数执行失败
*/
uint8_t mpu6050_set_rate(uint16_t rate)
{
uint8_t ret;
uint8_t dat;
if (rate > 1000)
{
rate = 1000;
}
if (rate < 4)
{
rate = 4;
}
dat = 1000 / rate - 1;
ret = mpu6050_write_byte(MPU6050_ADDRESS, MPU6050_RA_SMPLRT_DIV, dat);
if (ret != MPU6050_EOK)
{
return ret;
}
ret = mpu6050_set_lpf(rate >> 1);
if (ret != MPU6050_EOK)
{
return ret;
}
return MPU6050_EOK;
}
/**
* @brief MPU6050获取温度值
* @param temperature: 获取到的温度值(扩大了100倍)
* @retval MPU6050_EOK : 函数执行成功
* MPU6050_EACK: IIC通讯ACK错误,函数执行失败
*/
uint8_t mpu6050_get_temperature(int16_t *temp)
{
uint8_t dat[2];
uint8_t ret;
int16_t raw = 0;
ret = Sensors_I2C_ReadRegister(MPU6050_ADDRESS, MPU6050_RA_TEMP_OUT_H, 2, dat);
if (ret == MPU6050_EOK)
{
raw = ((uint16_t)dat[0] << 8) | dat[1];
*temp = (int16_t)((36.53f + ((float)raw / 340)) * 100);
}
return ret;
}
/**
* @brief MPU6050获取陀螺仪值
* @param gx,gy,gz: 陀螺仪x、y、z轴的原始度数(带符号)
* @retval MPU6050_EOK : 函数执行成功
* MPU6050_EACK: IIC通讯ACK错误,函数执行失败
*/
uint8_t mpu6050_get_gyroscope(int16_t *gx, int16_t *gy, int16_t *gz)
{
uint8_t dat[6];
uint8_t ret;
ret = Sensors_I2C_ReadRegister(MPU6050_ADDRESS, MPU6050_RA_GYRO_XOUT_H, 6, dat);
if (ret == MPU6050_EOK)
{
*gx = ((uint16_t)dat[0] << 8) | dat[1];
*gy = ((uint16_t)dat[2] << 8) | dat[3];
*gz = ((uint16_t)dat[4] << 8) | dat[5];
}
return ret;
}
/**
* @brief MPU6050获取加速度值
* @param ax,ay,az: 加速度x、y、z轴的原始度数(带符号)
* @retval MPU6050_EOK : 函数执行成功
* MPU6050_EACK: IIC通讯ACK错误,函数执行失败
*/
uint8_t mpu6050_get_accelerometer(int16_t *ax, int16_t *ay, int16_t *az)
{
uint8_t dat[6];
uint8_t ret;
ret = Sensors_I2C_ReadRegister(MPU6050_ADDRESS, MPU6050_RA_ACCEL_XOUT_H, 6, dat);
if (ret == MPU6050_EOK)
{
*ax = ((uint16_t)dat[0] << 8) | dat[1];
*ay = ((uint16_t)dat[2] << 8) | dat[3];
*az = ((uint16_t)dat[4] << 8) | dat[5];
}
return ret;
}
/**
* @brief MPU6050初始化
* @param 无
* @retval MPU6050_EOK: 函数执行成功
* MPU6050_EID: 获取ID错误,函数执行失败
*/
uint8_t mpu6050_init(void)
{
uint8_t id;
// mpu6050_hw_init(); /* MPU6050硬件初始化 */
// mpu6050_iic_init(); /* 初始化IIC接口 */
mpu6050_sw_reset(); /* MPU6050软件复位 */
mpu6050_set_gyro_fsr(3); /* 陀螺仪传感器,±2000dps */
mpu6050_set_accel_fsr(0); /* 加速度传感器,±2g */
mpu6050_set_rate(50); /* 采样率,50Hz */
mpu6050_write_byte(MPU6050_ADDRESS, MPU6050_RA_INT_ENABLE, 0X00); /* 关闭所有中断 */
mpu6050_write_byte(MPU6050_ADDRESS, MPU6050_RA_USER_CTRL, 0X00); /* 关闭IIC主模式 */
mpu6050_write_byte(MPU6050_ADDRESS, MPU6050_RA_FIFO_EN, 0X00); /* 关闭FIFO */
mpu6050_write_byte(MPU6050_ADDRESS, MPU6050_RA_INT_PIN_CFG, 0X80); /* INT引脚低电平有效 */
mpu6050_read_byte(MPU6050_ADDRESS, MPU6050_WHO_AM_I, &id); /* 读取设备ID */
printf("id = %d\r\n",id);
if (id != 0x68)
{
return MPU6050_EID;
}
mpu6050_write_byte(MPU6050_ADDRESS, MPU6050_RA_PWR_MGMT_1, 0x01); /* 设置CLKSEL,PLL X轴为参考 */
mpu6050_write_byte(MPU6050_ADDRESS, MPU6050_RA_PWR_MGMT_2, 0x00); /* 加速度与陀螺仪都工作 */
mpu6050_set_rate(50); /* 采样率,50Hz */
return MPU6050_EOK;
}
mpu6050.h
#ifndef __MPU6050_H
#define __MPU6050_H
#include "main.h"
// MPU6050, Standard address 0x68
#define MPU6050_ADDRESS 0xD0
//
#define MPU6050_WHO_AM_I 0x75
#define MPU6050_SMPLRT_DIV 0 //8000Hz
#define MPU6050_DLPF_CFG 0
#define MPU6050_GYRO_OUT 0x43 //MPU6050陀螺仪数据寄存器地址
#define MPU6050_ACC_OUT 0x3B //MPU6050加速度数据寄存器地址
#define MPU6050_RA_XG_OFFS_TC 0x00 //[7] PWR_MODE, [6:1] XG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_YG_OFFS_TC 0x01 //[7] PWR_MODE, [6:1] YG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_ZG_OFFS_TC 0x02 //[7] PWR_MODE, [6:1] ZG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_X_FINE_GAIN 0x03 //[7:0] X_FINE_GAIN
#define MPU6050_RA_Y_FINE_GAIN 0x04 //[7:0] Y_FINE_GAIN
#define MPU6050_RA_Z_FINE_GAIN 0x05 //[7:0] Z_FINE_GAIN
#define MPU6050_RA_XA_OFFS_H 0x06 //[15:0] XA_OFFS
#define MPU6050_RA_XA_OFFS_L_TC 0x07
#define MPU6050_RA_YA_OFFS_H 0x08 //[15:0] YA_OFFS
#define MPU6050_RA_YA_OFFS_L_TC 0x09
#define MPU6050_RA_ZA_OFFS_H 0x0A //[15:0] ZA_OFFS
#define MPU6050_RA_ZA_OFFS_L_TC 0x0B
#define MPU6050_RA_XG_OFFS_USRH 0x13 //[15:0] XG_OFFS_USR
#define MPU6050_RA_XG_OFFS_USRL 0x14
#define MPU6050_RA_YG_OFFS_USRH 0x15 //[15:0] YG_OFFS_USR
#define MPU6050_RA_YG_OFFS_USRL 0x16
#define MPU6050_RA_ZG_OFFS_USRH 0x17 //[15:0] ZG_OFFS_USR
#define MPU6050_RA_ZG_OFFS_USRL 0x18
#define MPU6050_RA_SMPLRT_DIV 0x19 // 采样频率分频器
#define MPU6050_RA_CONFIG 0x1A // 配置寄存器
#define MPU6050_RA_GYRO_CONFIG 0x1B // 陀螺仪配置寄存器
#define MPU6050_RA_ACCEL_CONFIG 0x1C // 加速度计配置寄存器
#define MPU6050_RA_FF_THR 0x1D
#define MPU6050_RA_FF_DUR 0x1E
#define MPU6050_RA_MOT_THR 0x1F // 运动检测阀值设置寄存器
#define MPU6050_RA_MOT_DUR 0x20
#define MPU6050_RA_ZRMOT_THR 0x21
#define MPU6050_RA_ZRMOT_DUR 0x22
#define MPU6050_RA_FIFO_EN 0x23 // FIFO使能寄存器
#define MPU6050_RA_I2C_MST_CTRL 0x24
#define MPU6050_RA_I2C_SLV0_ADDR 0x25
#define MPU6050_RA_I2C_SLV0_REG 0x26
#define MPU6050_RA_I2C_SLV0_CTRL 0x27
#define MPU6050_RA_I2C_SLV1_ADDR 0x28
#define MPU6050_RA_I2C_SLV1_REG 0x29
#define MPU6050_RA_I2C_SLV1_CTRL 0x2A
#define MPU6050_RA_I2C_SLV2_ADDR 0x2B
#define MPU6050_RA_I2C_SLV2_REG 0x2C
#define MPU6050_RA_I2C_SLV2_CTRL 0x2D
#define MPU6050_RA_I2C_SLV3_ADDR 0x2E
#define MPU6050_RA_I2C_SLV3_REG 0x2F
#define MPU6050_RA_I2C_SLV3_CTRL 0x30
#define MPU6050_RA_I2C_SLV4_ADDR 0x31
#define MPU6050_RA_I2C_SLV4_REG 0x32
#define MPU6050_RA_I2C_SLV4_DO 0x33
#define MPU6050_RA_I2C_SLV4_CTRL 0x34
#define MPU6050_RA_I2C_SLV4_DI 0x35
#define MPU6050_RA_I2C_MST_STATUS 0x36
#define MPU6050_RA_INT_PIN_CFG 0x37 // 中断/旁路设置寄存器
#define MPU6050_RA_INT_ENABLE 0x38 // 中断使能寄存器
#define MPU6050_RA_DMP_INT_STATUS 0x39
#define MPU6050_RA_INT_STATUS 0x3A
#define MPU6050_RA_ACCEL_XOUT_H 0x3B // 加速度值,X轴高8位寄存器
#define MPU6050_RA_ACCEL_XOUT_L 0x3C
#define MPU6050_RA_ACCEL_YOUT_H 0x3D
#define MPU6050_RA_ACCEL_YOUT_L 0x3E
#define MPU6050_RA_ACCEL_ZOUT_H 0x3F
#define MPU6050_RA_ACCEL_ZOUT_L 0x40
#define MPU6050_RA_TEMP_OUT_H 0x41 // 温度值高八位寄存器
#define MPU6050_RA_TEMP_OUT_L 0x42
#define MPU6050_RA_GYRO_XOUT_H 0x43 // 陀螺仪值,X轴高8位寄存器
#define MPU6050_RA_GYRO_XOUT_L 0x44
#define MPU6050_RA_GYRO_YOUT_H 0x45
#define MPU6050_RA_GYRO_YOUT_L 0x46
#define MPU6050_RA_GYRO_ZOUT_H 0x47
#define MPU6050_RA_GYRO_ZOUT_L 0x48
#define MPU6050_RA_EXT_SENS_DATA_00 0x49
#define MPU6050_RA_EXT_SENS_DATA_01 0x4A
#define MPU6050_RA_EXT_SENS_DATA_02 0x4B
#define MPU6050_RA_EXT_SENS_DATA_03 0x4C
#define MPU6050_RA_EXT_SENS_DATA_04 0x4D
#define MPU6050_RA_EXT_SENS_DATA_05 0x4E
#define MPU6050_RA_EXT_SENS_DATA_06 0x4F
#define MPU6050_RA_EXT_SENS_DATA_07 0x50
#define MPU6050_RA_EXT_SENS_DATA_08 0x51
#define MPU6050_RA_EXT_SENS_DATA_09 0x52
#define MPU6050_RA_EXT_SENS_DATA_10 0x53
#define MPU6050_RA_EXT_SENS_DATA_11 0x54
#define MPU6050_RA_EXT_SENS_DATA_12 0x55
#define MPU6050_RA_EXT_SENS_DATA_13 0x56
#define MPU6050_RA_EXT_SENS_DATA_14 0x57
#define MPU6050_RA_EXT_SENS_DATA_15 0x58
#define MPU6050_RA_EXT_SENS_DATA_16 0x59
#define MPU6050_RA_EXT_SENS_DATA_17 0x5A
#define MPU6050_RA_EXT_SENS_DATA_18 0x5B
#define MPU6050_RA_EXT_SENS_DATA_19 0x5C
#define MPU6050_RA_EXT_SENS_DATA_20 0x5D
#define MPU6050_RA_EXT_SENS_DATA_21 0x5E
#define MPU6050_RA_EXT_SENS_DATA_22 0x5F
#define MPU6050_RA_EXT_SENS_DATA_23 0x60
#define MPU6050_RA_MOT_DETECT_STATUS 0x61
#define MPU6050_RA_I2C_SLV0_DO 0x63
#define MPU6050_RA_I2C_SLV1_DO 0x64
#define MPU6050_RA_I2C_SLV2_DO 0x65
#define MPU6050_RA_I2C_SLV3_DO 0x66
#define MPU6050_RA_I2C_MST_DELAY_CTRL 0x67
#define MPU6050_RA_SIGNAL_PATH_RESET 0x68
#define MPU6050_RA_MOT_DETECT_CTRL 0x69
#define MPU6050_RA_USER_CTRL 0x6A // 用户控制寄存器
#define MPU6050_RA_PWR_MGMT_1 0x6B // 电源管理寄存器1
#define MPU6050_RA_PWR_MGMT_2 0x6C // 电源管理寄存器2
#define MPU6050_RA_BANK_SEL 0x6D
#define MPU6050_RA_MEM_START_ADDR 0x6E
#define MPU6050_RA_MEM_R_W 0x6F
#define MPU6050_RA_DMP_CFG_1 0x70
#define MPU6050_RA_DMP_CFG_2 0x71
#define MPU6050_RA_FIFO_COUNTH 0x72
#define MPU6050_RA_FIFO_COUNTL 0x73
#define MPU6050_RA_FIFO_R_W 0x74
#define MPU6050_RA_WHO_AM_I 0x75 // 器件ID寄存器
#define MPU6050_TC_PWR_MODE_BIT 7
#define MPU6050_TC_OFFSET_BIT 6
#define MPU6050_TC_OFFSET_LENGTH 6
#define MPU6050_TC_OTP_BNK_VLD_BIT 0
#define MPU6050_VDDIO_LEVEL_VLOGIC 0
#define MPU6050_VDDIO_LEVEL_VDD 1
#define MPU6050_CFG_EXT_SYNC_SET_BIT 5
#define MPU6050_CFG_EXT_SYNC_SET_LENGTH 3
#define MPU6050_CFG_DLPF_CFG_BIT 2
#define MPU6050_CFG_DLPF_CFG_LENGTH 3
#define MPU6050_EXT_SYNC_DISABLED 0x0
#define MPU6050_EXT_SYNC_TEMP_OUT_L 0x1
#define MPU6050_EXT_SYNC_GYRO_XOUT_L 0x2
#define MPU6050_EXT_SYNC_GYRO_YOUT_L 0x3
#define MPU6050_EXT_SYNC_GYRO_ZOUT_L 0x4
#define MPU6050_EXT_SYNC_ACCEL_XOUT_L 0x5
#define MPU6050_EXT_SYNC_ACCEL_YOUT_L 0x6
#define MPU6050_EXT_SYNC_ACCEL_ZOUT_L 0x7
#define MPU6050_DLPF_BW_256 0x00
#define MPU6050_DLPF_BW_188 0x01
#define MPU6050_DLPF_BW_98 0x02
#define MPU6050_DLPF_BW_42 0x03
#define MPU6050_DLPF_BW_20 0x04
#define MPU6050_DLPF_BW_10 0x05
#define MPU6050_DLPF_BW_5 0x06
#define MPU6050_GCONFIG_FS_SEL_BIT 4
#define MPU6050_GCONFIG_FS_SEL_LENGTH 2
#define MPU6050_GYRO_FS_250 0x00
#define MPU6050_GYRO_FS_500 0x01
#define MPU6050_GYRO_FS_1000 0x02
#define MPU6050_GYRO_FS_2000 0x03
#define MPU6050_ACONFIG_XA_ST_BIT 7
#define MPU6050_ACONFIG_YA_ST_BIT 6
#define MPU6050_ACONFIG_ZA_ST_BIT 5
#define MPU6050_ACONFIG_AFS_SEL_BIT 4
#define MPU6050_ACONFIG_AFS_SEL_LENGTH 2
#define MPU6050_ACONFIG_ACCEL_HPF_BIT 2
#define MPU6050_ACONFIG_ACCEL_HPF_LENGTH 3
#define MPU6050_ACCEL_FS_2 0x00
#define MPU6050_ACCEL_FS_4 0x01
#define MPU6050_ACCEL_FS_8 0x02
#define MPU6050_ACCEL_FS_16 0x03
#define MPU6050_DHPF_RESET 0x00
#define MPU6050_DHPF_5 0x01
#define MPU6050_DHPF_2P5 0x02
#define MPU6050_DHPF_1P25 0x03
#define MPU6050_DHPF_0P63 0x04
#define MPU6050_DHPF_HOLD 0x07
#define MPU6050_TEMP_FIFO_EN_BIT 7
#define MPU6050_XG_FIFO_EN_BIT 6
#define MPU6050_YG_FIFO_EN_BIT 5
#define MPU6050_ZG_FIFO_EN_BIT 4
#define MPU6050_ACCEL_FIFO_EN_BIT 3
#define MPU6050_SLV2_FIFO_EN_BIT 2
#define MPU6050_SLV1_FIFO_EN_BIT 1
#define MPU6050_SLV0_FIFO_EN_BIT 0
#define MPU6050_MULT_MST_EN_BIT 7
#define MPU6050_WAIT_FOR_ES_BIT 6
#define MPU6050_SLV_3_FIFO_EN_BIT 5
#define MPU6050_I2C_MST_P_NSR_BIT 4
#define MPU6050_I2C_MST_CLK_BIT 3
#define MPU6050_I2C_MST_CLK_LENGTH 4
#define MPU6050_CLOCK_DIV_348 0x0
#define MPU6050_CLOCK_DIV_333 0x1
#define MPU6050_CLOCK_DIV_320 0x2
#define MPU6050_CLOCK_DIV_308 0x3
#define MPU6050_CLOCK_DIV_296 0x4
#define MPU6050_CLOCK_DIV_286 0x5
#define MPU6050_CLOCK_DIV_276 0x6
#define MPU6050_CLOCK_DIV_267 0x7
#define MPU6050_CLOCK_DIV_258 0x8
#define MPU6050_CLOCK_DIV_500 0x9
#define MPU6050_CLOCK_DIV_471 0xA
#define MPU6050_CLOCK_DIV_444 0xB
#define MPU6050_CLOCK_DIV_421 0xC
#define MPU6050_CLOCK_DIV_400 0xD
#define MPU6050_CLOCK_DIV_381 0xE
#define MPU6050_CLOCK_DIV_364 0xF
#define MPU6050_I2C_SLV_RW_BIT 7
#define MPU6050_I2C_SLV_ADDR_BIT 6
#define MPU6050_I2C_SLV_ADDR_LENGTH 7
#define MPU6050_I2C_SLV_EN_BIT 7
#define MPU6050_I2C_SLV_BYTE_SW_BIT 6
#define MPU6050_I2C_SLV_REG_DIS_BIT 5
#define MPU6050_I2C_SLV_GRP_BIT 4
#define MPU6050_I2C_SLV_LEN_BIT 3
#define MPU6050_I2C_SLV_LEN_LENGTH 4
#define MPU6050_I2C_SLV4_RW_BIT 7
#define MPU6050_I2C_SLV4_ADDR_BIT 6
#define MPU6050_I2C_SLV4_ADDR_LENGTH 7
#define MPU6050_I2C_SLV4_EN_BIT 7
#define MPU6050_I2C_SLV4_INT_EN_BIT 6
#define MPU6050_I2C_SLV4_REG_DIS_BIT 5
#define MPU6050_I2C_SLV4_MST_DLY_BIT 4
#define MPU6050_I2C_SLV4_MST_DLY_LENGTH 5
#define MPU6050_MST_PASS_THROUGH_BIT 7
#define MPU6050_MST_I2C_SLV4_DONE_BIT 6
#define MPU6050_MST_I2C_LOST_ARB_BIT 5
#define MPU6050_MST_I2C_SLV4_NACK_BIT 4
#define MPU6050_MST_I2C_SLV3_NACK_BIT 3
#define MPU6050_MST_I2C_SLV2_NACK_BIT 2
#define MPU6050_MST_I2C_SLV1_NACK_BIT 1
#define MPU6050_MST_I2C_SLV0_NACK_BIT 0
#define MPU6050_INTCFG_INT_LEVEL_BIT 7
#define MPU6050_INTCFG_INT_OPEN_BIT 6
#define MPU6050_INTCFG_LATCH_INT_EN_BIT 5
#define MPU6050_INTCFG_INT_RD_CLEAR_BIT 4
#define MPU6050_INTCFG_FSYNC_INT_LEVEL_BIT 3
#define MPU6050_INTCFG_FSYNC_INT_EN_BIT 2
#define MPU6050_INTCFG_I2C_BYPASS_EN_BIT 1
#define MPU6050_INTCFG_CLKOUT_EN_BIT 0
#define MPU6050_INTMODE_ACTIVEHIGH 0x00
#define MPU6050_INTMODE_ACTIVELOW 0x01
#define MPU6050_INTDRV_PUSHPULL 0x00
#define MPU6050_INTDRV_OPENDRAIN 0x01
#define MPU6050_INTLATCH_50USPULSE 0x00
#define MPU6050_INTLATCH_WAITCLEAR 0x01
#define MPU6050_INTCLEAR_STATUSREAD 0x00
#define MPU6050_INTCLEAR_ANYREAD 0x01
#define MPU6050_INTERRUPT_FF_BIT 7
#define MPU6050_INTERRUPT_MOT_BIT 6
#define MPU6050_INTERRUPT_ZMOT_BIT 5
#define MPU6050_INTERRUPT_FIFO_OFLOW_BIT 4
#define MPU6050_INTERRUPT_I2C_MST_INT_BIT 3
#define MPU6050_INTERRUPT_PLL_RDY_INT_BIT 2
#define MPU6050_INTERRUPT_DMP_INT_BIT 1
#define MPU6050_INTERRUPT_DATA_RDY_BIT 0
// TODO: figure out what these actually do
// UMPL source code is not very obivous
#define MPU6050_DMPINT_5_BIT 5
#define MPU6050_DMPINT_4_BIT 4
#define MPU6050_DMPINT_3_BIT 3
#define MPU6050_DMPINT_2_BIT 2
#define MPU6050_DMPINT_1_BIT 1
#define MPU6050_DMPINT_0_BIT 0
#define MPU6050_MOTION_MOT_XNEG_BIT 7
#define MPU6050_MOTION_MOT_XPOS_BIT 6
#define MPU6050_MOTION_MOT_YNEG_BIT 5
#define MPU6050_MOTION_MOT_YPOS_BIT 4
#define MPU6050_MOTION_MOT_ZNEG_BIT 3
#define MPU6050_MOTION_MOT_ZPOS_BIT 2
#define MPU6050_MOTION_MOT_ZRMOT_BIT 0
#define MPU6050_DELAYCTRL_DELAY_ES_SHADOW_BIT 7
#define MPU6050_DELAYCTRL_I2C_SLV4_DLY_EN_BIT 4
#define MPU6050_DELAYCTRL_I2C_SLV3_DLY_EN_BIT 3
#define MPU6050_DELAYCTRL_I2C_SLV2_DLY_EN_BIT 2
#define MPU6050_DELAYCTRL_I2C_SLV1_DLY_EN_BIT 1
#define MPU6050_DELAYCTRL_I2C_SLV0_DLY_EN_BIT 0
#define MPU6050_PATHRESET_GYRO_RESET_BIT 2
#define MPU6050_PATHRESET_ACCEL_RESET_BIT 1
#define MPU6050_PATHRESET_TEMP_RESET_BIT 0
#define MPU6050_DETECT_ACCEL_ON_DELAY_BIT 5
#define MPU6050_DETECT_ACCEL_ON_DELAY_LENGTH 2
#define MPU6050_DETECT_FF_COUNT_BIT 3
#define MPU6050_DETECT_FF_COUNT_LENGTH 2
#define MPU6050_DETECT_MOT_COUNT_BIT 1
#define MPU6050_DETECT_MOT_COUNT_LENGTH 2
#define MPU6050_DETECT_DECREMENT_RESET 0x0
#define MPU6050_DETECT_DECREMENT_1 0x1
#define MPU6050_DETECT_DECREMENT_2 0x2
#define MPU6050_DETECT_DECREMENT_4 0x3
#define MPU6050_USERCTRL_DMP_EN_BIT 7
#define MPU6050_USERCTRL_FIFO_EN_BIT 6
#define MPU6050_USERCTRL_I2C_MST_EN_BIT 5
#define MPU6050_USERCTRL_I2C_IF_DIS_BIT 4
#define MPU6050_USERCTRL_DMP_RESET_BIT 3
#define MPU6050_USERCTRL_FIFO_RESET_BIT 2
#define MPU6050_USERCTRL_I2C_MST_RESET_BIT 1
#define MPU6050_USERCTRL_SIG_COND_RESET_BIT 0
#define MPU6050_PWR1_DEVICE_RESET_BIT 7
#define MPU6050_PWR1_SLEEP_BIT 6
#define MPU6050_PWR1_CYCLE_BIT 5
#define MPU6050_PWR1_TEMP_DIS_BIT 3
#define MPU6050_PWR1_CLKSEL_BIT 2
#define MPU6050_PWR1_CLKSEL_LENGTH 3
#define MPU6050_CLOCK_INTERNAL 0x00
#define MPU6050_CLOCK_PLL_XGYRO 0x01
#define MPU6050_CLOCK_PLL_YGYRO 0x02
#define MPU6050_CLOCK_PLL_ZGYRO 0x03
#define MPU6050_CLOCK_PLL_EXT32K 0x04
#define MPU6050_CLOCK_PLL_EXT19M 0x05
#define MPU6050_CLOCK_KEEP_RESET 0x07
#define MPU6050_PWR2_LP_WAKE_CTRL_BIT 7
#define MPU6050_PWR2_LP_WAKE_CTRL_LENGTH 2
#define MPU6050_PWR2_STBY_XA_BIT 5
#define MPU6050_PWR2_STBY_YA_BIT 4
#define MPU6050_PWR2_STBY_ZA_BIT 3
#define MPU6050_PWR2_STBY_XG_BIT 2
#define MPU6050_PWR2_STBY_YG_BIT 1
#define MPU6050_PWR2_STBY_ZG_BIT 0
#define MPU6050_WAKE_FREQ_1P25 0x0
#define MPU6050_WAKE_FREQ_2P5 0x1
#define MPU6050_WAKE_FREQ_5 0x2
#define MPU6050_WAKE_FREQ_10 0x3
#define MPU6050_BANKSEL_PRFTCH_EN_BIT 6
#define MPU6050_BANKSEL_CFG_USER_BANK_BIT 5
#define MPU6050_BANKSEL_MEM_SEL_BIT 4
#define MPU6050_BANKSEL_MEM_SEL_LENGTH 5
#define MPU6050_WHO_AM_I_BIT 6
#define MPU6050_WHO_AM_I_LENGTH 6
#define MPU6050_DMP_MEMORY_BANKS 8
#define MPU6050_DMP_MEMORY_BANK_SIZE 256
#define MPU6050_DMP_MEMORY_CHUNK_SIZE 16
void MPU6050ReadTemp(short *tempData);
void MPU6050ReadGyro(short *gyroData);
void MPU6050ReadAcc(short *accData);
void MPU6050_ReturnTemp(float*Temperature);
void MPU6050_Init(void);
uint8_t MPU6050ReadID(void);
void MPU6050_WriteReg(uint8_t reg_add,uint8_t reg_dat);
void MPU6050_ReadData(uint8_t reg_add,unsigned char* Read,uint8_t num);
void MPU6050_PWR_MGMT_1_INIT(void);
/* 操作函数 */
uint8_t mpu6050_write(uint8_t addr, uint8_t reg, uint8_t len, uint8_t *dat); /* 往ATK-MS6050的指定寄存器连续写入指定数据 */
uint8_t mpu6050_write_byte(uint8_t addr, uint8_t reg, uint8_t dat); /* 往ATK-MS6050的指定寄存器写入一字节数据 */
uint8_t mpu6050_read(uint8_t addr, uint8_t reg, uint8_t len, uint8_t *dat); /* 连续读取ATK-MS6050指定寄存器的值 */
uint8_t mpu6050_read_byte(uint8_t addr, uint8_t reg, uint8_t *dat); /* 读取ATK-MS6050指定寄存器的值 */
void mpu6050_sw_reset(void); /* ATK-MS6050软件复位 */
uint8_t mpu6050_set_gyro_fsr(uint8_t fsr); /* ATK-MS6050设置陀螺仪传感器量程范围 */
uint8_t mpu6050_set_accel_fsr(uint8_t fsr); /* ATK-MS6050设置加速度传感器量程范围 */
uint8_t mpu6050_set_lpf(uint16_t lpf); /* ATK-MS6050设置数字低通滤波器频率 */
uint8_t mpu6050_set_rate(uint16_t rate); /* ATK-MS6050设置采样率 */
uint8_t mpu6050_get_temperature(int16_t *temp); /* ATK-MS6050获取温度值 */
uint8_t mpu6050_get_gyroscope(int16_t *gx, int16_t *gy, int16_t *gz); /* ATK-MS6050获取陀螺仪值 */
uint8_t mpu6050_get_accelerometer(int16_t *ax, int16_t *ay, int16_t *az); /* ATK-MS6050获取加速度值 */
uint8_t mpu6050_init(void);
/* 函数错误代码 */
#define MPU6050_EOK 0 /* 没有错误 */
#define MPU6050_EID 1 /* ID错误 */
#define MPU6050_EACK 2 /* IIC通讯ACK错误 */
#endif /*__MPU6050*/
代码分析
主要涉及与MPU6050传感器通信和配置相关的函数。以下是对每个函数的简要说明:
MPU6050_WriteReg(uint8_t reg_add,uint8_t reg_dat): 将数据写入MPU6050寄存器的函数。
MPU6050_ReadData(uint8_t reg_add,unsigned char* Read,uint8_t num): 从MPU6050寄存器读取数据的函数。
mpu6050_write_byte(uint8_t addr, uint8_t reg, uint8_t dat): 向MPU6050指定寄存器写入一字节数据的函数。
mpu6050_read_byte(uint8_t addr, uint8_t reg, uint8_t *dat): 读取MPU6050指定寄存器的值的函数。
MPU6050_Init(void): 初始化MPU6050芯片的函数,包括解除休眠状态和配置传感器参数等。
MPU6050ReadID(void): 读取MPU6050的ID,并检查是否能够正确识别MPU6050模块。
MPU6050ReadAcc(short *accData): 读取MPU6050的加速度数据。
MPU6050ReadGyro(short *gyroData): 读取MPU6050的角加速度数据。
MPU6050ReadTemp(short *tempData): 读取MPU6050的原始温度数据。
MPU6050_ReturnTemp(float *Temperature): 将读取到的温度数据转化为摄氏度。
mpu6050_sw_reset(void): 执行MPU6050的软件复位操作。
mpu6050_set_gyro_fsr(uint8_t fsr): 设置MPU6050陀螺仪传感器的量程范围。
mpu6050_set_accel_fsr(uint8_t fsr): 设置MPU6050加速度传感器的量程范围。
mpu6050_set_lpf(uint16_t lpf): 设置MPU6050的数字低通滤波器频率。
mpu6050_set_rate(uint16_t rate): 设置MPU6050的采样率。
mpu6050_get_temperature(int16_t *temp): 获取MPU6050的温度值。
mpu6050_get_gyroscope(int16_t *gx, int16_t *gy, int16_t *gz): 获取MPU6050的陀螺仪值。
mpu6050_get_accelerometer(int16_t *ax, int16_t *ay, int16_t *az): 获取MPU6050的加速度值。
mpu6050_init(void): 对MPU6050进行初始化的函数。
这些函数可以用于控制和读取MPU6050传感器的数据。请确保正确连接MPU6050模块,并在代码中适当调用这些函数来实现您的应用逻
DMP移植
先获取到移植所需的文件,我使用的文件来自正点原子陀螺仪资料,见文件添加进工程,再进行自己mcu的适配修改
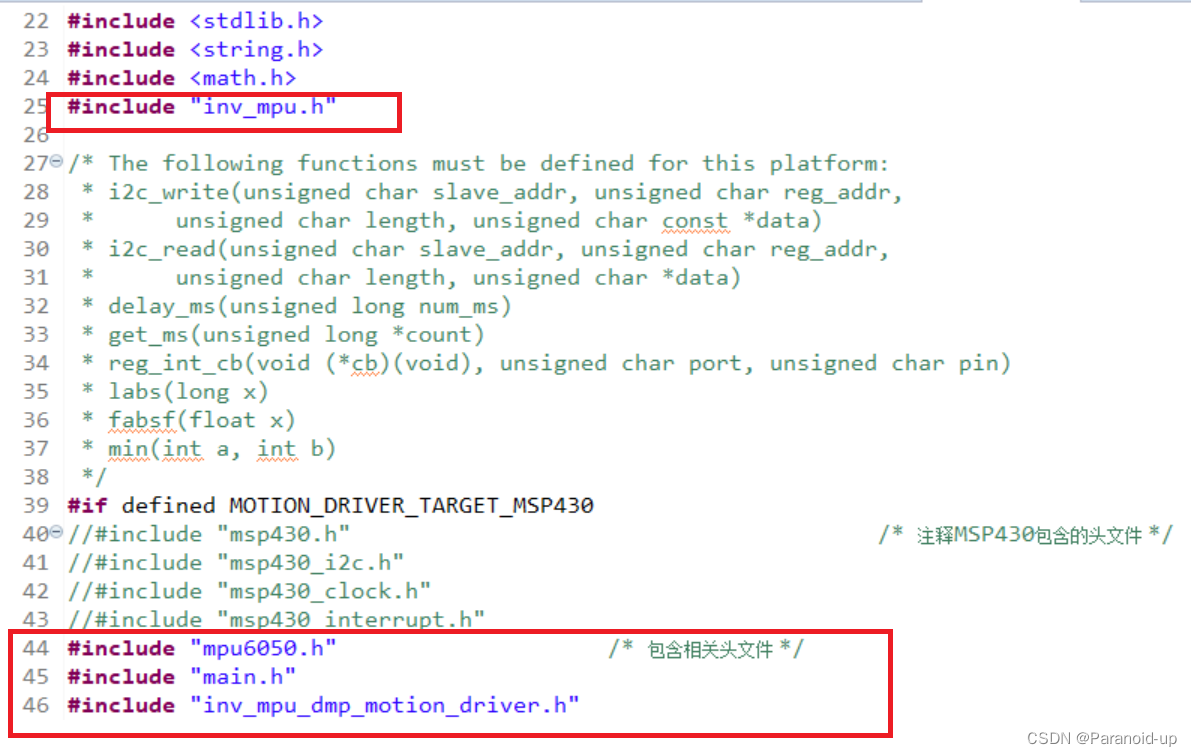
1.修改头文件路径为自己的头文件路径
inv_mpu.c
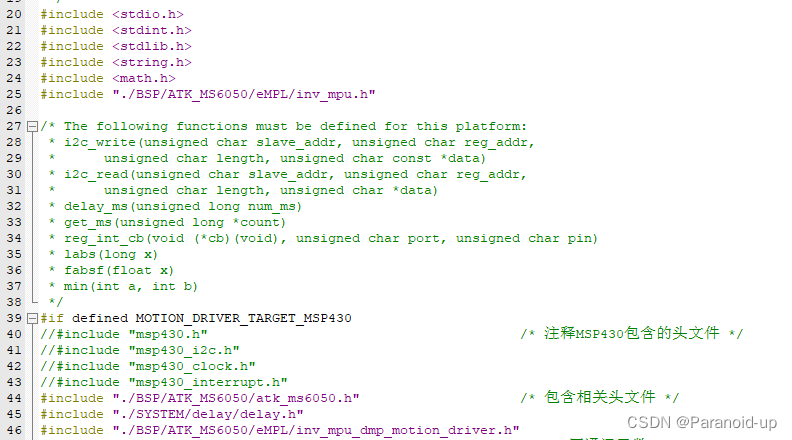
修改
inv_mpu_dmp_motion_driver.c
修改
2.修改I2C读写函数为自己mcu平台的读写函数
inv_mpu.c

修改为

3.修改延时函数为自己平台的延时函数
inv_mpu.c

修改为

inv_mpu_dmp_motion_driver.c

修改

4.修改MPU6050的地址
mpu6050.h
修改MPU6050地址为0XD0

inv_mpu.c
修改MPU6050地址为0XD0
软件I2C读取时不需要修改这个地址
使用举例
/* 初始化MPU6050 */
PRINT_LOG("<<File:%s Line:%d Function:%s>>\r\n ", __FILE__, __LINE__, __FUNCTION__);
int ret = 0;
float pit, rol, yaw;
int16_t acc_x, acc_y, acc_z;
int16_t gyr_x, gyr_y, gyr_z;
int16_t temp;
ret = 1;
ret = mpu6050_init();
if (ret != 0)
{
PRINT_LOG("<<File:%s Line:%d Function:%s>>\r\n ", __FILE__, __LINE__, __FUNCTION__);
printf("MPU6050 init failed!\r\n");
}
ret = 1;
while(ret){
/* 初始化MPU6050 DMP */
ret = mpu6050_dmp_init();
if (ret != 0)
{
printf("MPU6050 DMP init failed!\r\n");
}
}
while (1)
{
/* 获取MPU6050 DMP处理后的数据 */
ret = mpu6050_dmp_get_data(&pit, &rol, &yaw);
/* 获取MPU6050加速度值 */
ret += mpu6050_get_accelerometer(&acc_x, &acc_y, &acc_z);
/* 获取MPU6050陀螺仪值 */
ret += mpu6050_get_gyroscope(&gyr_x, &gyr_y, &gyr_z);
/* 获取MPU6050温度值 */
ret += mpu6050_get_temperature(&temp);
/* 上传相关数据信息至串口调试助手 */
printf("pit: %.2f, rol: %.2f, yaw: %.2f,\r\n ", pit, rol, yaw);
printf("acc_x: %d, acc_y: %d, acc_z: %d, \r\n", acc_x, acc_y, acc_z);
printf("gyr_x: %d, gyr_y: %d, gyr_z: %d, \r\n", gyr_x, gyr_y, gyr_z);
printf("temp: %d\r\n", temp);
ret = mpu6050_dmp_get_data(&pit, &rol, &yaw);
printf("pit: %.2f, rol: %.2f, yaw: %.2f,\r\n ", pit, rol, yaw);
HAL_Delay(5000);
// mpu6050_init();
// mpu6050_dmp_init();
}
这段代码初始化了MPU6050传感器,并使用DMP(数字运动处理)模块获取传感器的姿态数据(俯仰、横滚和偏航),加速度数据,陀螺仪数据和温度数据。然后,它通过串口调试助手打印这些数据。在主循环中,代码等待5秒钟后重复获取和打印数据。
请注意,上述代码可能需要根据您的具体硬件配置和要求进行修改和适应。确保正确连接MPU6050模块,并根据您的需求进行必要的初始化和配置。
如果文章对您有帮助,点赞支持👍,感谢🤝