本篇文章来自极术社区与兆易创新组织的GD32F427开发板评测活动,更多开发板试用活动请关注极术社区网站。作者:理想三旬
引言
在工作闲暇之际,逛逛论坛,无意间看到GD的试用活动,一如既往的积极,在官方还没发布时就申请了,也如愿的收到了板子,感谢官方和社区给了探索这块板子的机会。
Why rtt
RT-Thread Nano 是一个极简版的硬实时内核,它是由 C 语言开发,采用面向对象的编程思维,具有良好的代码风格,是一款可裁剪的、抢占式实时多任务的 RTOS。其内存资源占用极小,功能包括任务处理、软件定时器、信号量、邮箱和实时调度等相对完整的实时操作系统特性。只需内核与Finsh就足够使用,简单方便,个人不喜欢太复杂。
资源
- GD32F427VKT6
- 32位Arm®Cortex®-M4处理器内核
- 高达200 MHz的工作频率
- 3072K Flash
- 256k SRAM
- 4个USART和4个UART,3个I2C,6个SPI,2个I2S,2个CAN2.0B
- 1个SDIO接口、1个10/100M以太网控制器
- 3个采样率高达2.6M SPS的12位高速ADC和2个12位DAC,
- 单循环乘法和硬件除法器
- 浮点单元(FPU)
- 集成DSP指令
- 集成嵌套矢量中断控制器(NVIC)
- 24位SysTick定时器
板载: - GDlink(可惜只能作为下载,没有串口)
- 复位按键和用户按键
- 一个用户LED
- USB_HS、USB_FS等
开发前准备 - 资料下载地址:
https://aijishu.com/a/1060000…
- 安装芯片包
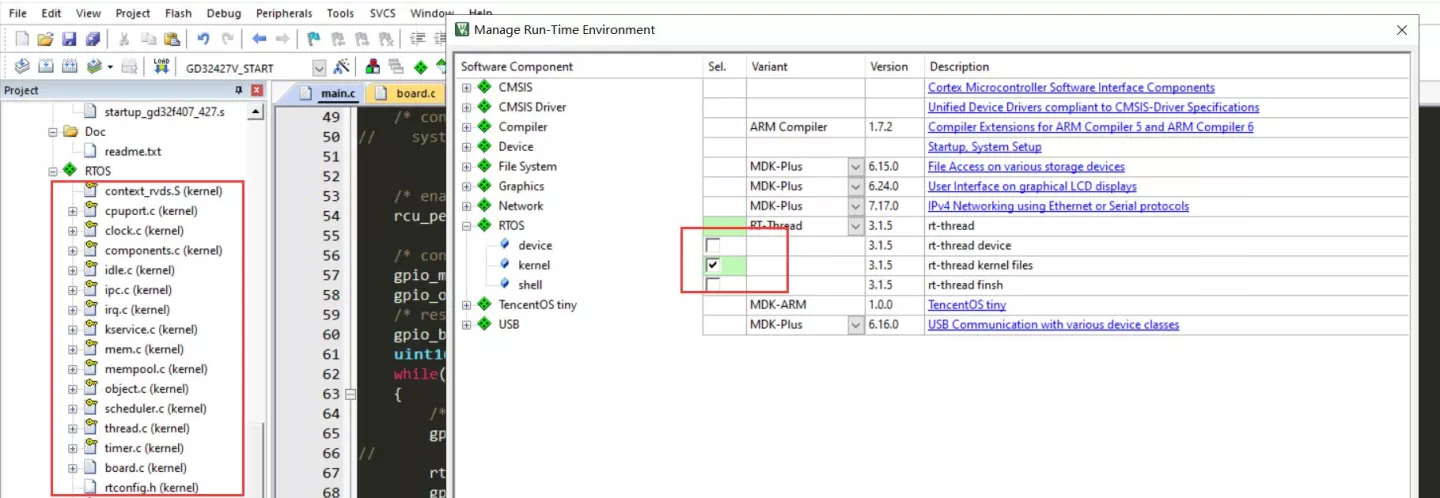
- keil安装rtt包
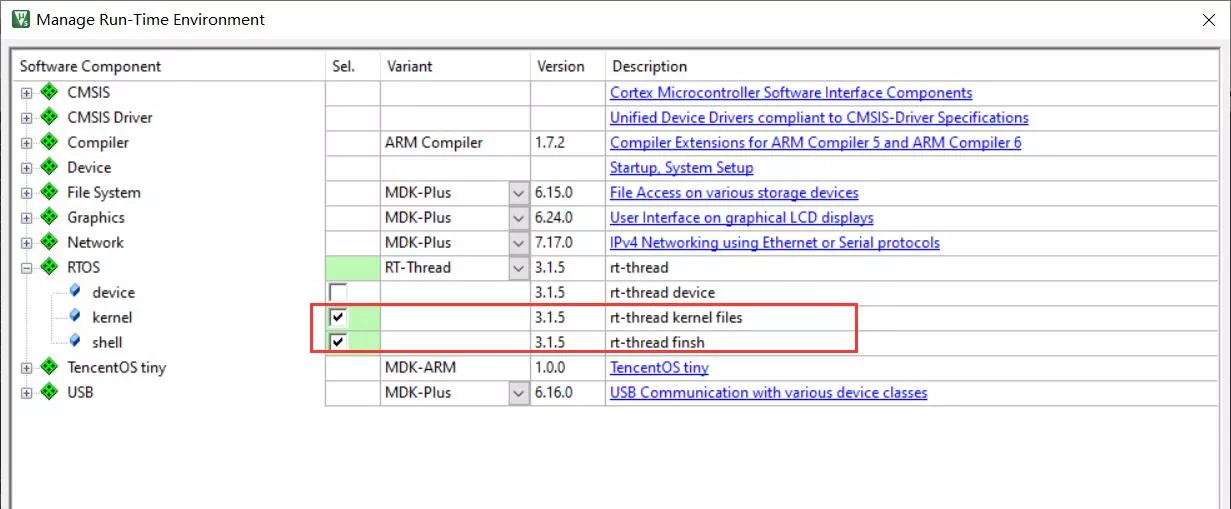
rtt移植
- 打开LED工程

- 添加rtt源码
- board.c处理
- 屏蔽"gd32f4xx_it.c"中HardFault_Handler、PendSV_Handler、 SysTick_Handler函数
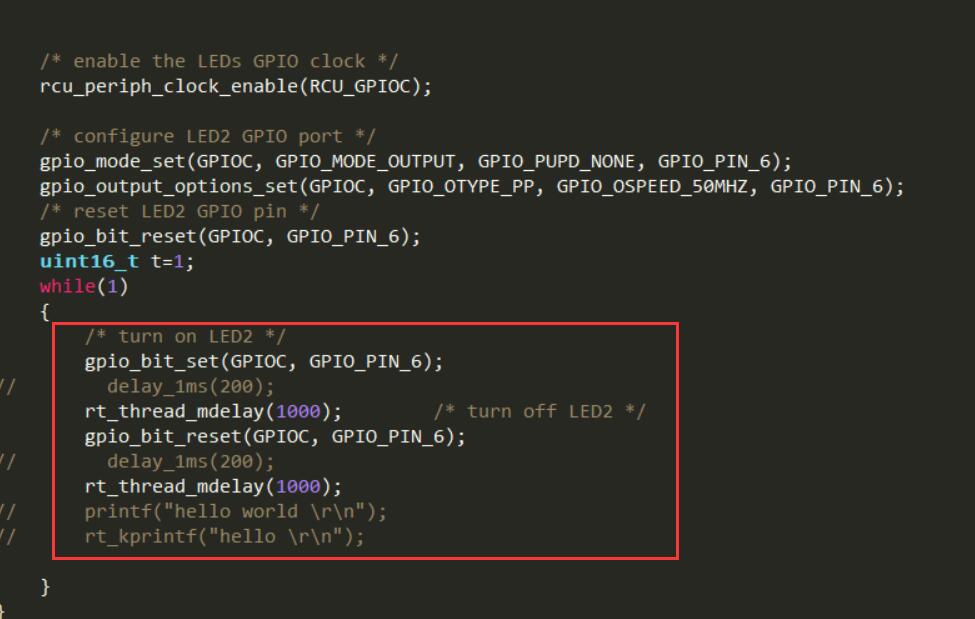
- 将裸机的延时函数换成操作系统的延时函数
添加Finsh
- 在添加Finsh前先准备串口
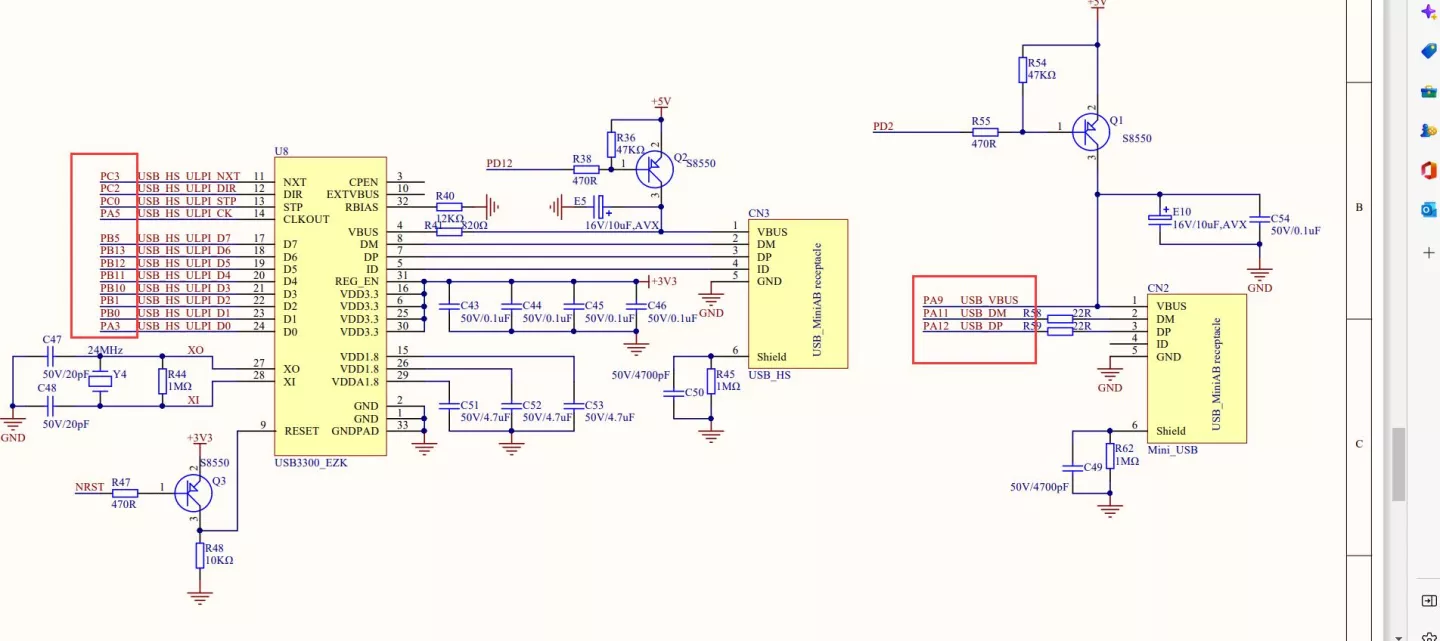
这里一点需要注意的地方,先上原理图在解释,PA9和PA3已经被占用,使用串口跳过这两个引脚
#include "usart.h"
#include <stdio.h>
#include <rtthread.h>
//int fputc(int ch, FILE *f)
//{
// /* 将Printf内容发往串口 */
// usart_data_transmit(USART1, (unsigned char) ch);
while (!(USART1->SR & USART_FLAG_TXE));
// while( usart_flag_get(USART1,USART_FLAG_TC)!= SET);
// return (ch);
//}
void usart_init(int32_t bound)
{
rcu_periph_clock_enable( RCU_GPIOD);
/* enable USART clock */
rcu_periph_clock_enable(RCU_USART1);
/* connect port to USARTx_Tx */
gpio_af_set(GPIOD, GPIO_AF_7, GPIO_PIN_5);
/* connect port to USARTx_Rx */
gpio_af_set(GPIOD, GPIO_AF_7, GPIO_PIN_6);
/* configure USART Tx as alternate function push-pull */
gpio_mode_set(GPIOD, GPIO_MODE_AF, GPIO_PUPD_PULLUP,GPIO_PIN_5);
gpio_output_options_set(GPIOD, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_5);
/* configure USART Rx as alternate function push-pull */
gpio_mode_set(GPIOD, GPIO_MODE_AF, GPIO_PUPD_PULLUP,GPIO_PIN_6);
gpio_output_options_set(GPIOD, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_6);
/* USART configure */
usart_deinit(USART1);
usart_baudrate_set(USART1,bound);
usart_receive_config(USART1, USART_RECEIVE_ENABLE);
usart_transmit_config(USART1, USART_TRANSMIT_ENABLE);
// nvic_irq_enable(USART1_IRQn, 2, 0);//设置串口中断的优先级
// //开启串口接收中断
// usart_interrupt_enable(USART1, USART_INT_RBNE);
usart_enable(USART1);
}
//void USART1_IRQHandler(void)
//{
// uint8_t rx_data = 0;
// //当接收中断发生
// if((RESET != usart_interrupt_flag_get(USART1, USART_INT_FLAG_RBNE)) &&
// (RESET != usart_flag_get(USART1, USART_FLAG_RBNE))){
// /* Read one byte from the receive data register */
// rx_data = (uint8_t)usart_data_receive(USART1);//获取接收到的数据
rt_kprintf("rx_data is %d",rx_data);
// }
//
// //当发送中断发生
// if((RESET != usart_flag_get(USART1, USART_FLAG_TBE)) &&
// (RESET != usart_interrupt_flag_get(USART1, USART_INT_FLAG_TBE))){
// /* Write one byte to the transmit data register */
// }
//}
- 添加Finsh源码
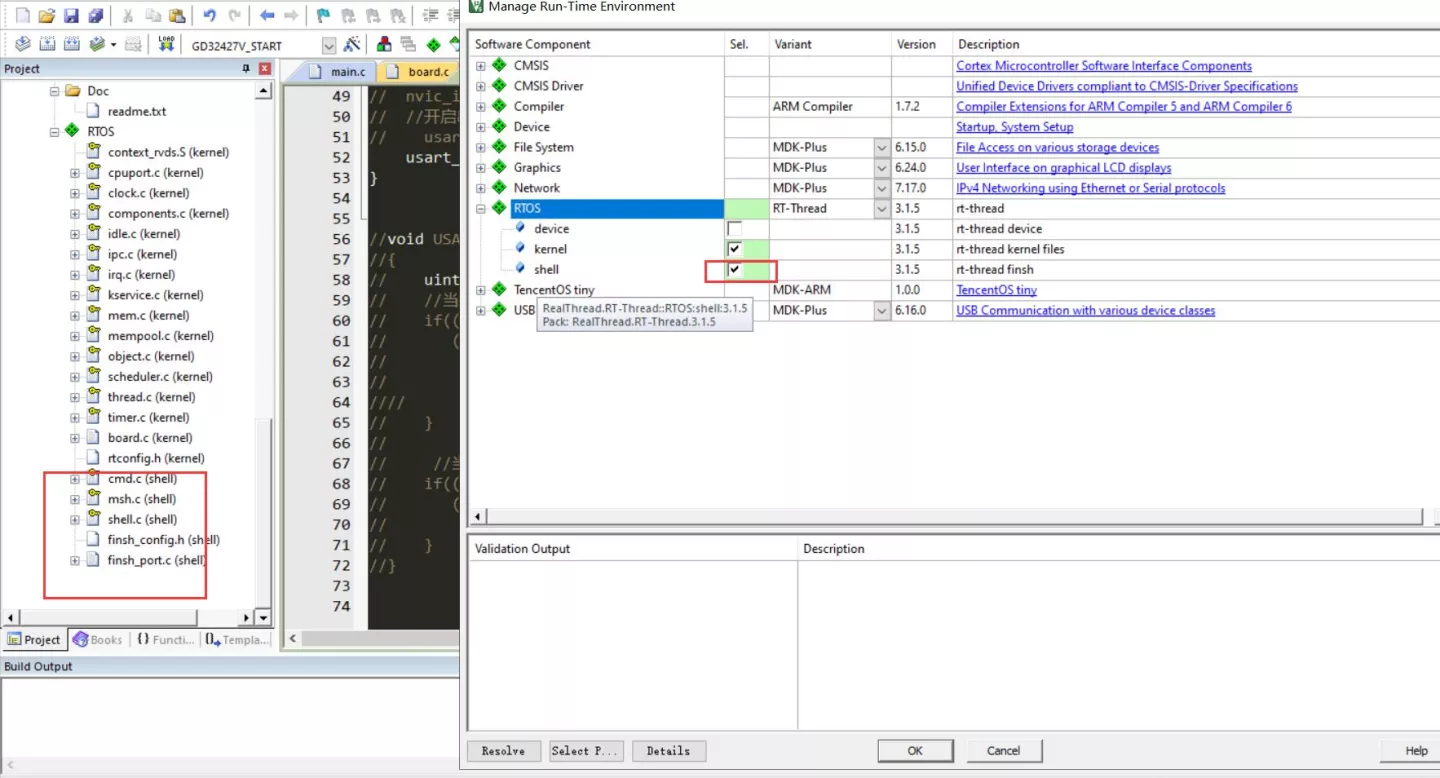
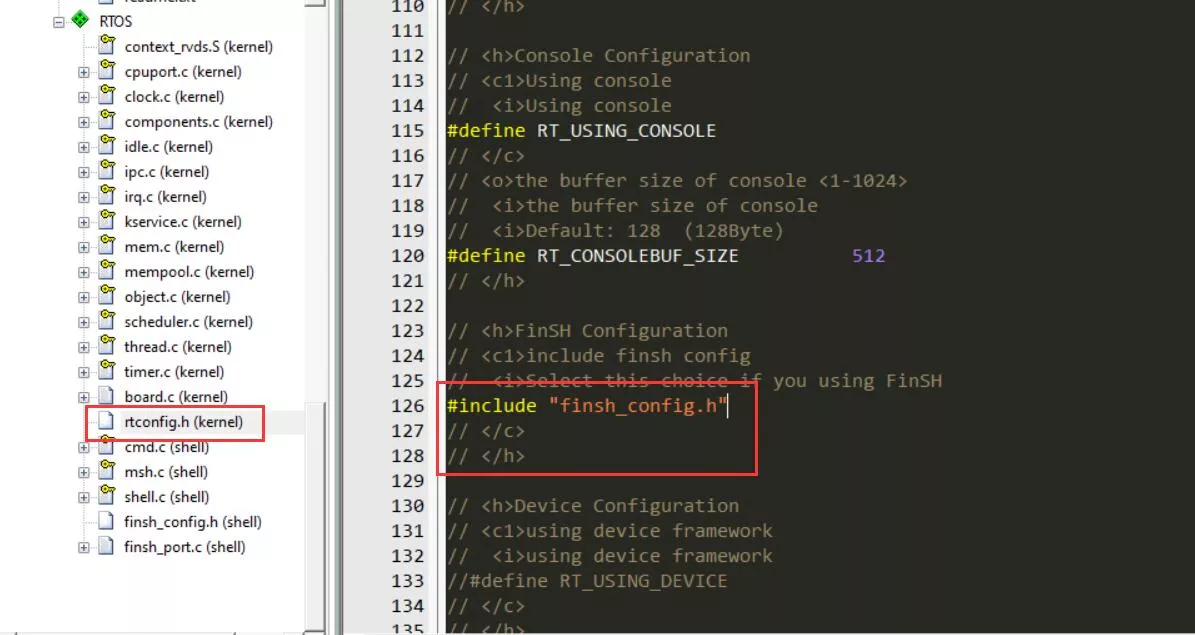
- 在rtconfig.h中打开finsh_config.h
- board.c中初始化串口
/*
* Copyright (c) 2006-2019, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-05-24 the first version
*/
#include <rthw.h>
#include <rtthread.h>
#include "systick.h"
#include "gd32f4xx.h"
#include "usart.h"
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
/*
* Please modify RT_HEAP_SIZE if you enable RT_USING_HEAP
* the RT_HEAP_SIZE max value = (sram size - ZI size), 1024 means 1024 bytes
*/
#define RT_HEAP_SIZE (20*1024)
static rt_uint8_t rt_heap[RT_HEAP_SIZE];
RT_WEAK void *rt_heap_begin_get(void)
{
return rt_heap;
}
RT_WEAK void *rt_heap_end_get(void)
{
return rt_heap + RT_HEAP_SIZE;
}
#endif
void rt_os_tick_callback(void)
{
rt_interrupt_enter();
rt_tick_increase();
rt_interrupt_leave();
}
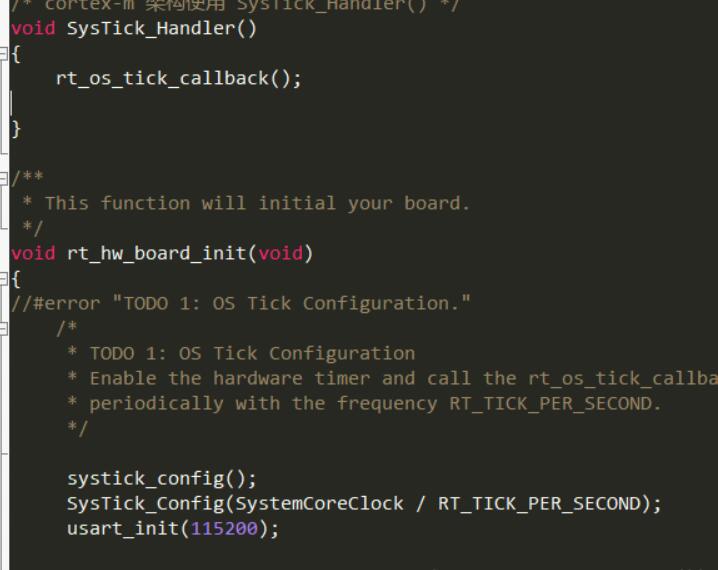
/* cortex-m 架构使用 SysTick_Handler() */
void SysTick_Handler()
{
rt_os_tick_callback();
}
/**
* This function will initial your board.
*/
void rt_hw_board_init(void)
{
//#error "TODO 1: OS Tick Configuration."
/*
* TODO 1: OS Tick Configuration
* Enable the hardware timer and call the rt_os_tick_callback function
* periodically with the frequency RT_TICK_PER_SECOND.
*/
systick_config();
SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
usart_init(115200);
/* Call components board initial (use INIT_BOARD_EXPORT()) */
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
}
#ifdef RT_USING_CONSOLE
//static int uart_init(void)
//{
//#error "TODO 2: Enable the hardware uart and config baudrate."
// return 0;
//}
//INIT_BOARD_EXPORT(uart_init);
void uart_send_byte(rt_uint8_t data)
{
while( usart_flag_get(USART1,USART_FLAG_TC)!= SET);
usart_data_transmit(USART1, (unsigned char) data);
}
void rt_hw_console_output(const char *str)
{
//#error "TODO 3: Output the string 'str' through the uart."
rt_size_t i = 0, size = 0;
char a = '\r';
// __HAL_UNLOCK(&UartHandle);
size = rt_strlen(str);
for (i = 0; i < size; i++)
{
if (*(str + i) == '\n')
{
uart_send_byte(a);
}
uart_send_byte( *(str + i) );
}
}
#endif
- 在finsh_port.c中添加接收代码
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
*/
#include <rthw.h>
#include <rtconfig.h>
#include "usart.h"
#ifndef RT_USING_FINSH
#error Please uncomment the line <#include "finsh_config.h"> in the rtconfig.h
#endif
#ifdef RT_USING_FINSH
RT_WEAK char rt_hw_console_getchar(void)
{
/* Note: the initial value of ch must < 0 */
int ch = -1;
//#error "TODO 4: Read a char from the uart and assign it to 'ch'."
if( usart_flag_get(USART1,USART_FLAG_RBNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
ch = (uint8_t)usart_data_receive(USART1) & 0xff;
// rt_kprintf("ch is %d",ch);
}
else
{
if( usart_flag_get(USART1, USART_FLAG_ORERR) != RESET) //
{
usart_flag_clear(USART1, USART_FLAG_RBNE);
}
rt_thread_mdelay(10);
}
return ch;
}
#endif /* RT_USING_FINSH */
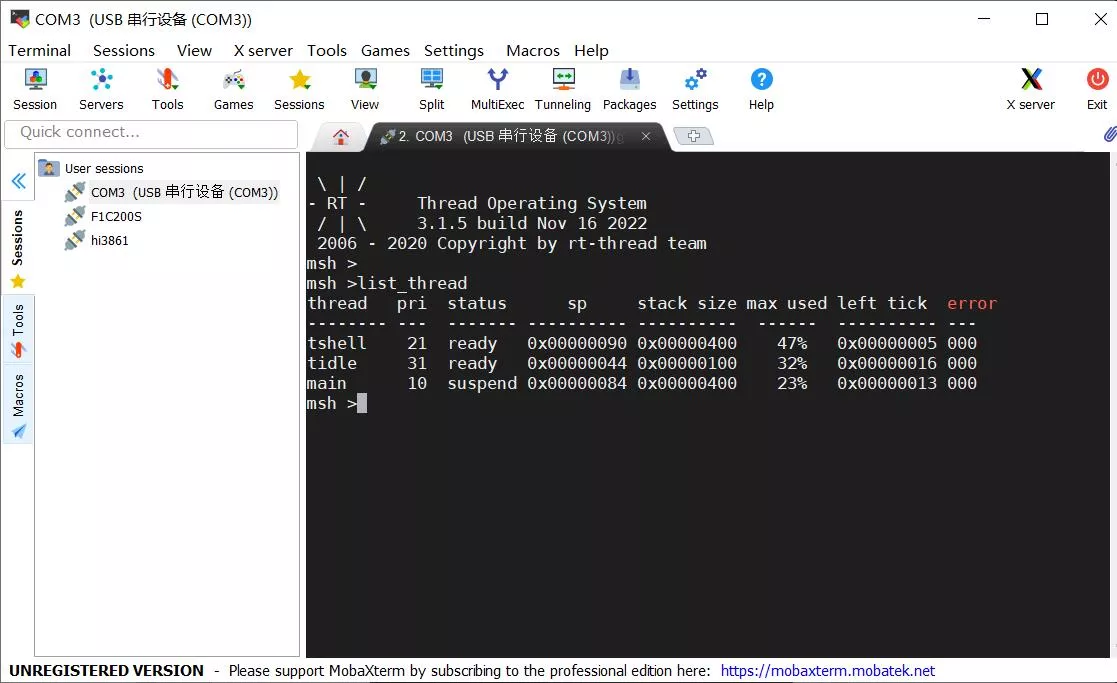
运行结果
- 下载程序,打开终端
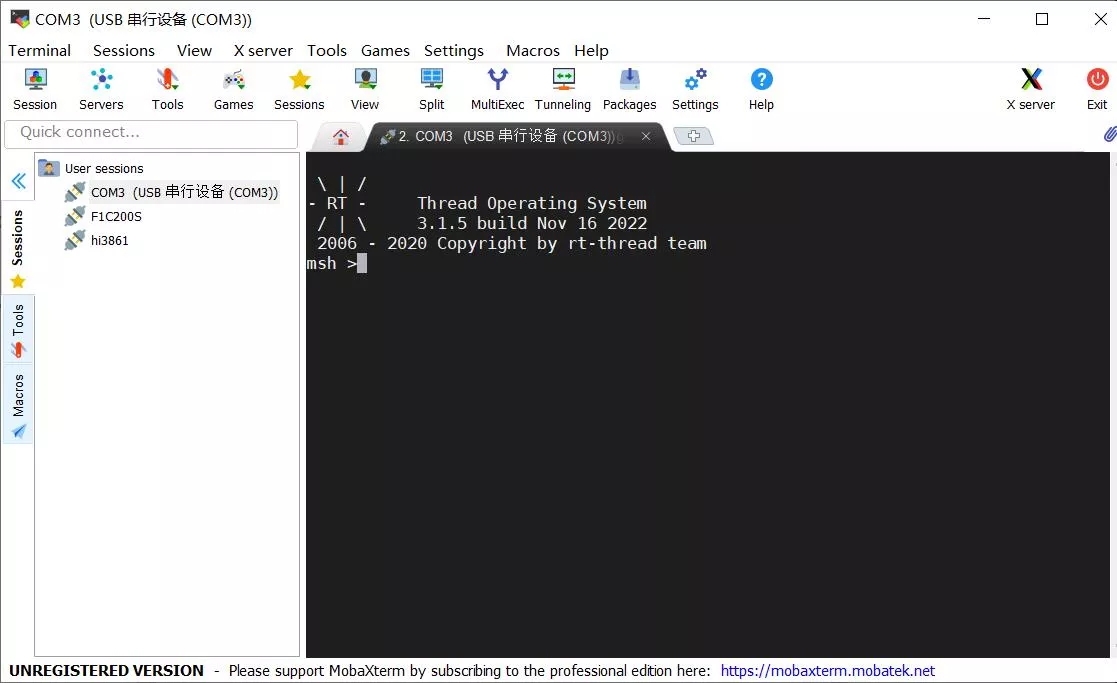
- 输入一个命令list_thread








![[本人毕业设计] 别踩白块_计算机科学与技术_前端H5游戏毕设](https://img-blog.csdnimg.cn/42bb197631804ac5b29d1e2cc966f54f.png)