STM32管脚模拟协议驱动双路16位DAC芯片TM8211
TM8211是一款国产的低成本双路16位DAC驱动芯片,可以应用于普通数模转换领域及音频转换领域等。这里介绍STM32 HAL库驱动TM8211的逻辑,时序和代码。
TM8211的功能特性为:
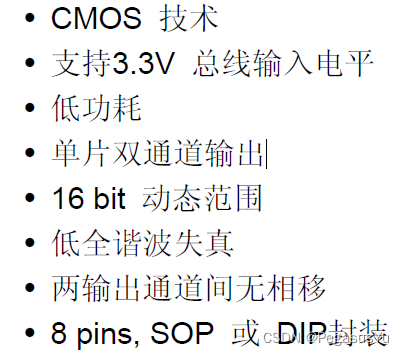
TM8211的内部电路功能框图为:
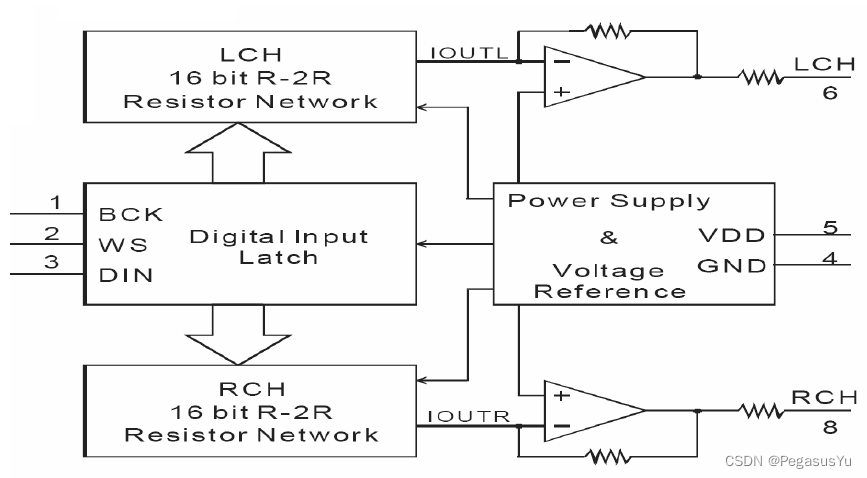
TM8211驱动逻辑
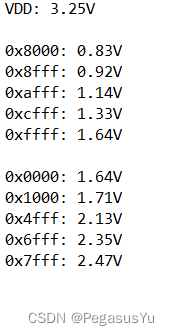
TM8211支持典型的3.3V供电和5V供电,在驱动后进行电压输出时,需要注意,如以3.3V供电为例,并非是驱动输出0~3.3V的范围,而是半范围,即驱动输出的电压范围为0.825V – 2.475V (1/4VDD-- 3/4VDD)。
TM8211的管脚定义为:
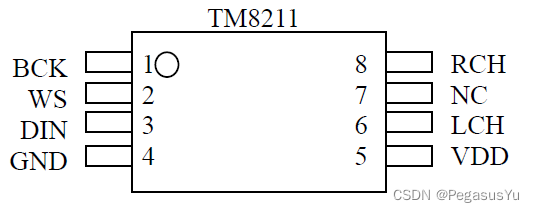
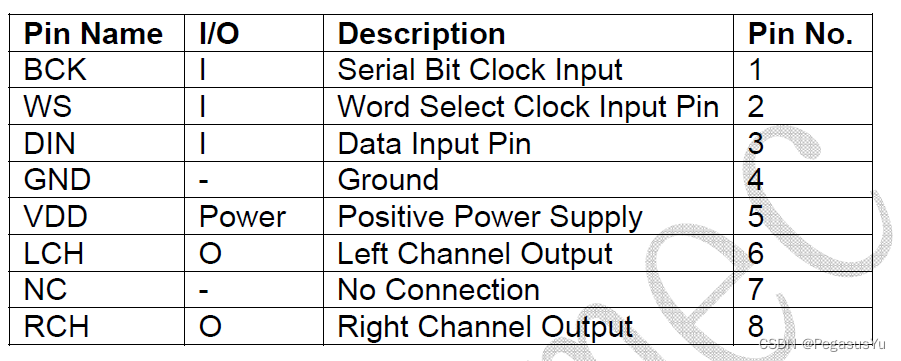
其中控制管脚为WS, BCK和DIN,LCH和RCH为两个输出通道,介绍如下:
WS: 高电平指示对LCH通道进行配置,低电平指示对RCH通道进行配置
BCK:配置过程的时钟线,TM8211在时钟上升沿锁存数据,在WS的某个电平状态,前16个时钟锁存的数据有效,后面的忽略
DIN: 配置过程的数据线
TM8211典型应用
TM8211可应用于双通道音频输出,如:
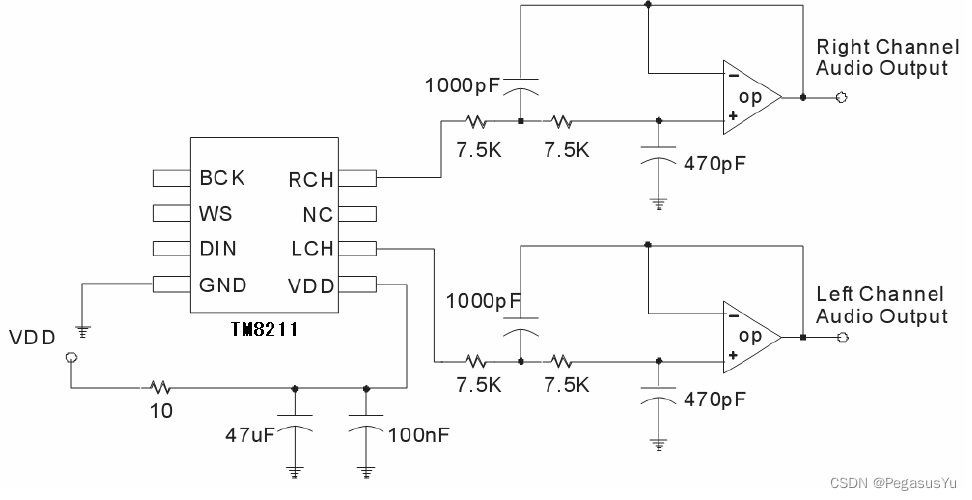
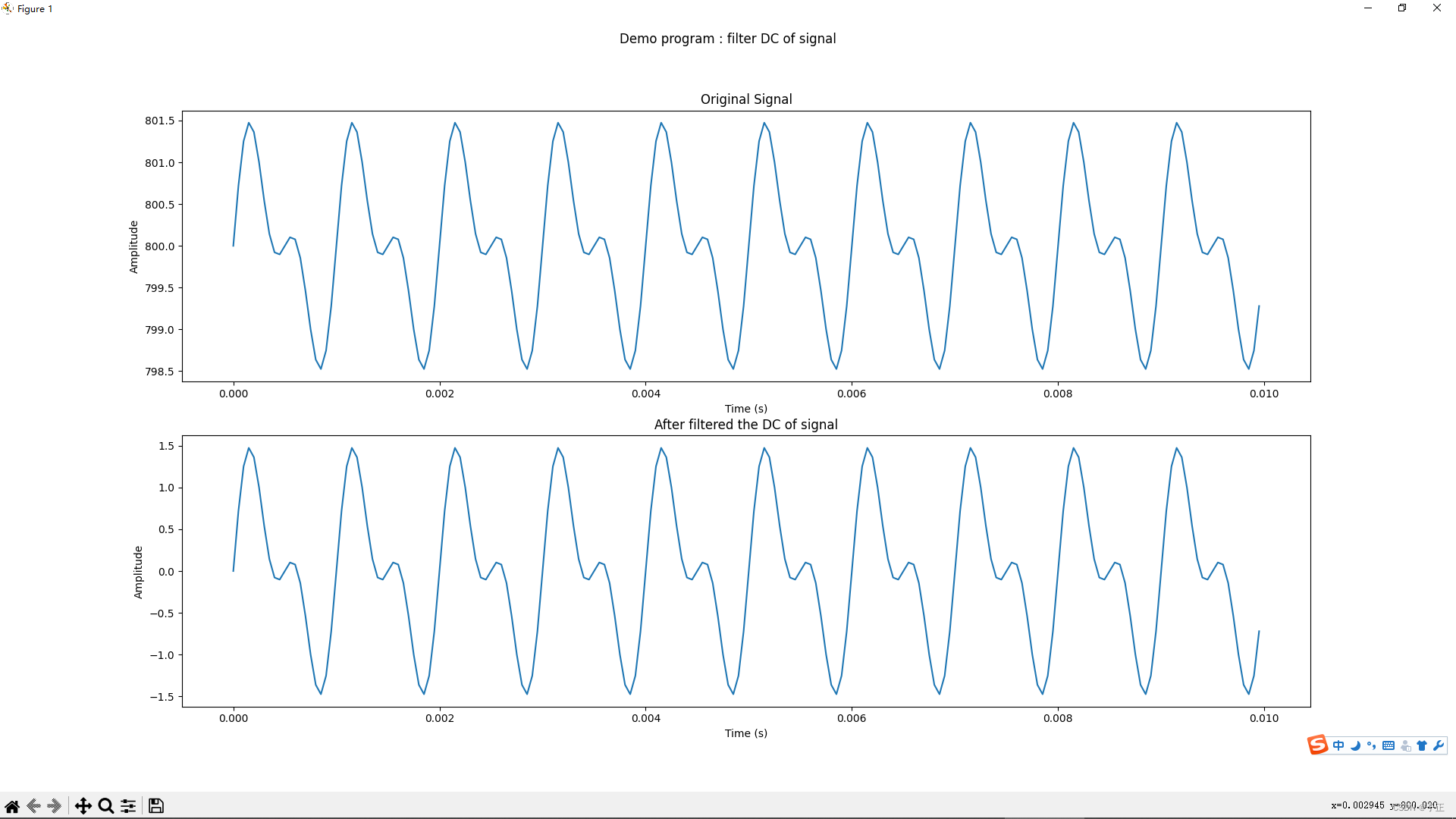
也可以控制输出交流波形,通过隔直电容去掉直流电压部分。
工程配置
TM8211的配置时钟最大可达18.4MHz,在不需要配置MHz级信号输出控制时,可以采用GPIO管脚模拟协议对TM8211输出电压进行控制。这里介绍STM32CUBEIDE开发平台,以STM32G030F6P6为例,GPIO管脚模拟协议配置TM8211的范例。需要进行更高速配置时则需要调整为SPI硬件接口驱动。
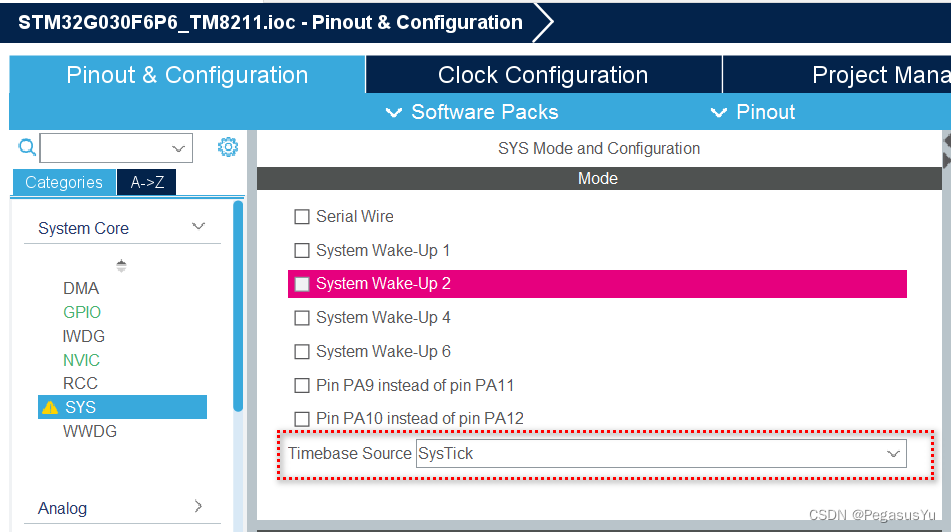
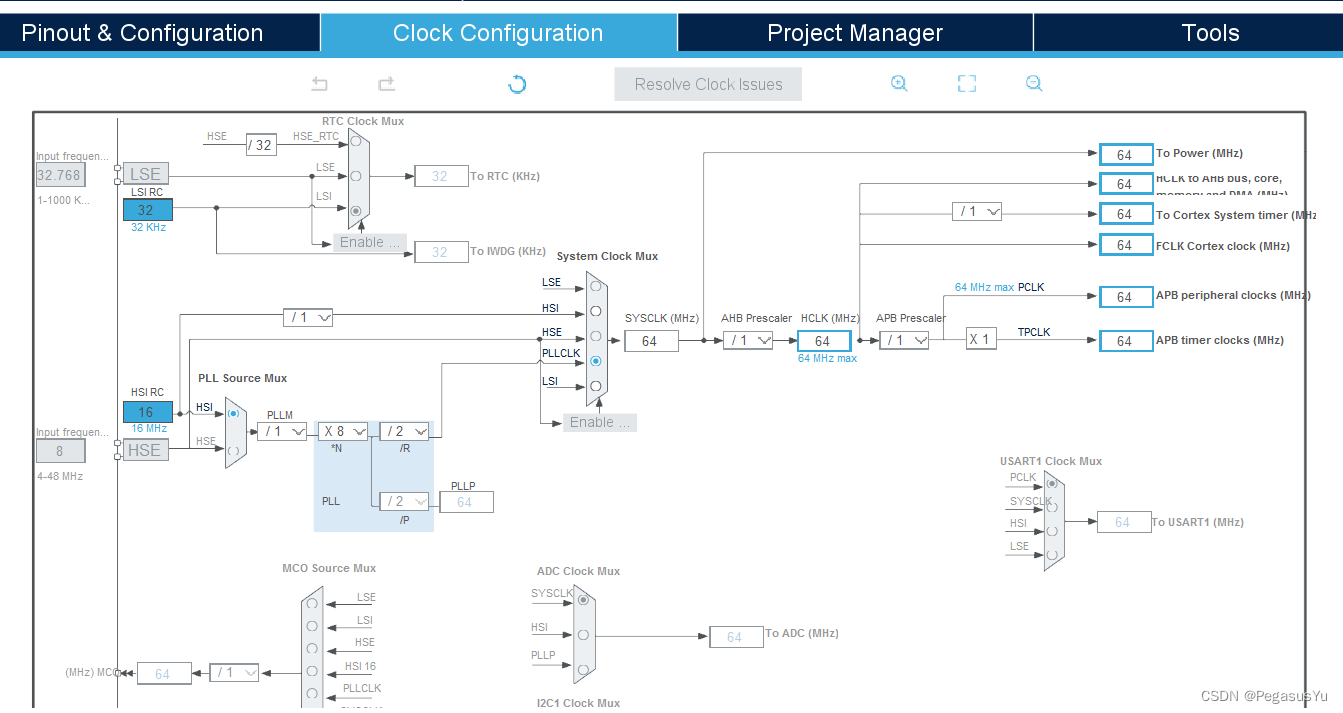
首先建立基本工程并配置时钟:
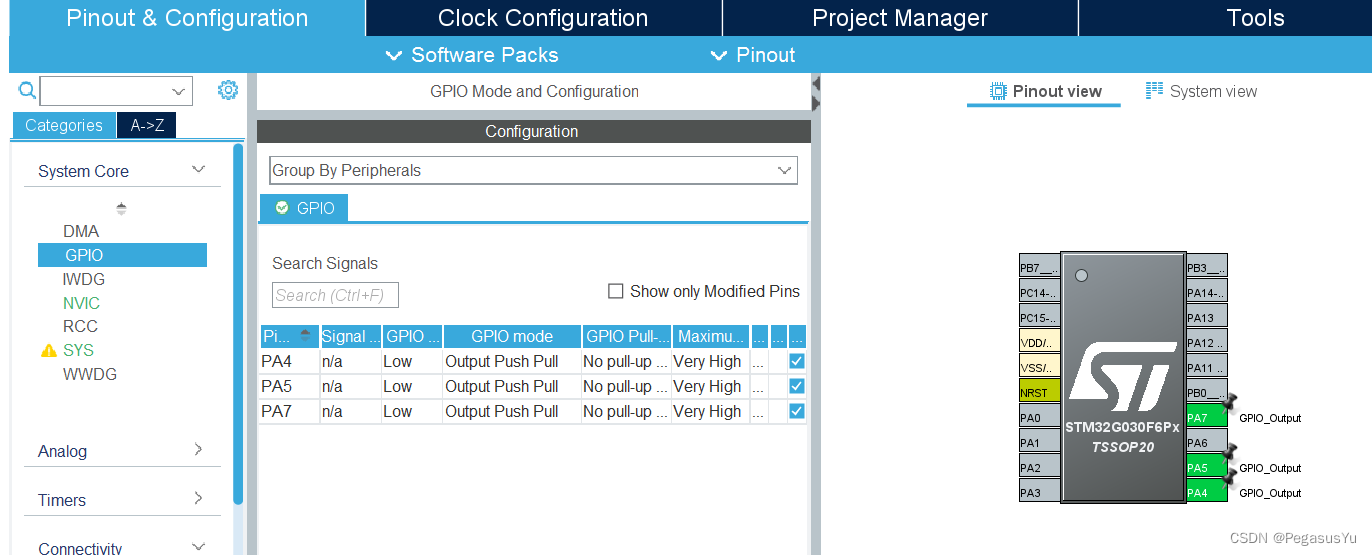
配置3个GPIO作为驱动接口:
保存并生成初始工程代码:

工程代码:
工程代码实现都在main.c文件里,代码里用到的微秒延时函数参考: STM32 HAL us delay(微秒延时)的指令延时实现方式及优化
两个通道都实现为类似正弦波的连续波形输出:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
#define TM8211_WS_L HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET)
#define TM8211_WS_H HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET)
#define TM8211_BCK_L HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET)
#define TM8211_BCK_H HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET)
#define TM8211_DIN_L HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_RESET)
#define TM8211_DIN_H HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_SET)
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
__IO float usDelayBase;
void PY_usDelayTest(void)
{
__IO uint32_t firstms, secondms;
__IO uint32_t counter = 0;
firstms = HAL_GetTick()+1;
secondms = firstms+1;
while(uwTick!=firstms) ;
while(uwTick!=secondms) counter++;
usDelayBase = ((float)counter)/1000;
}
void PY_Delay_us_t(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
void PY_usDelayOptimize(void)
{
__IO uint32_t firstms, secondms;
__IO float coe = 1.0;
firstms = HAL_GetTick();
PY_Delay_us_t(1000000) ;
secondms = HAL_GetTick();
coe = ((float)1000)/(secondms-firstms);
usDelayBase = coe*usDelayBase;
}
void PY_Delay_us(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t msNum = Delay/1000;
__IO uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);
if(msNum>0) HAL_Delay(msNum);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
#define us_num 2
void TM8211_OUTPUT_CONFIG(uint16_t LCH, uint16_t RCH)
{
uint8_t i;
TM8211_WS_L;
PY_Delay_us_t(us_num);
for(i=0; i<16; i++)
{
TM8211_BCK_L;
if( (RCH>>(15-i))&0x0001 ) TM8211_DIN_H;
else TM8211_DIN_L;
PY_Delay_us_t(us_num);
TM8211_BCK_H;
PY_Delay_us_t(us_num);
}
PY_Delay_us_t(us_num);
TM8211_WS_H;
PY_Delay_us_t(us_num);
for(i=0; i<16; i++)
{
TM8211_BCK_L;
if( (LCH>>(15-i))&0x0001 ) TM8211_DIN_H;
else TM8211_DIN_L;
PY_Delay_us_t(us_num);
TM8211_BCK_H;
PY_Delay_us_t(us_num);
}
PY_Delay_us_t(us_num);
TM8211_WS_L;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint16_t C1 = 0, C2 = 0;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
PY_usDelayTest();
PY_usDelayOptimize();
TM8211_OUTPUT_CONFIG(0x0000, 0x0000);
PY_Delay_us_t(5000000);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
for(uint16_t i=0x8000; i<0xffff; i++)
{
C1=C2=i;
TM8211_OUTPUT_CONFIG(C1, C2);
}
for(uint16_t j=0x0000; j<0x7fff; j++)
{
C1=C2=j;
TM8211_OUTPUT_CONFIG(C1, C2);
}
for(uint16_t j=0x7fff; j>0x0000; j--)
{
C1=C2=j;
TM8211_OUTPUT_CONFIG(C1, C2);
}
for(uint16_t i=0xffff; i>0x8000; i--)
{
C1=C2=i;
TM8211_OUTPUT_CONFIG(C1, C2);
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSIDiv = RCC_HSI_DIV1;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV1;
RCC_OscInitStruct.PLL.PLLN = 8;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_7, GPIO_PIN_RESET);
/*Configure GPIO pins : PA4 PA5 PA7 */
GPIO_InitStruct.Pin = GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
其中,配置值和输出电压的关系参考如下测试结果(3.3V供电)了解:
如果要应用供电参考电压全范围输出的双路16位DAC,则参考:STM32模拟SPI时序控制双路16位数模转换(16bit DAC)芯片DAC8552电压输出
例程下载
STM32G030F6P6管脚模拟协议驱动双路16位DAC芯片TM8211例程
–End–