简介
我是按照鱼香ROS的教程【3.搭建PlateFormIO开发环境】进行的,但是在进行的过程中,遇到了一些问题,这里记录下来,供有同样问题的同学进行参考。其实只要你使用的板子的MCU是ESP32,都可以按照他这个教程进行操作。
1.在第四节编译工程中,教程使用的vscode是有编译、上传的按钮的。但是我的没有。
教程的:
 我的:
我的:
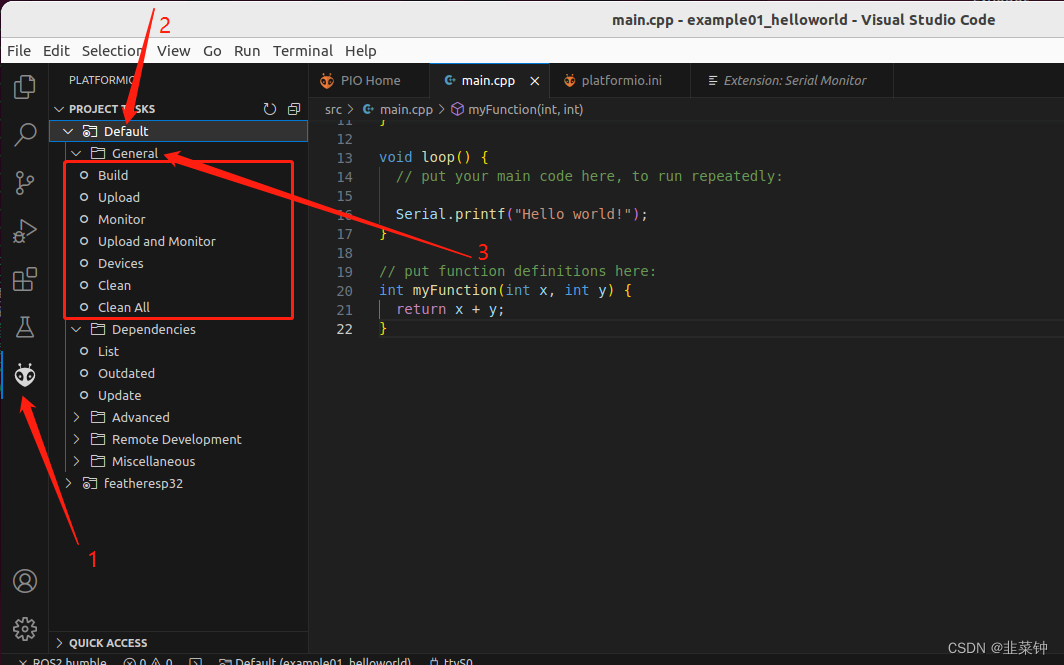
 不过没关系,点击那个小蚂蚁,执行RROJECT TASKS–》General下面的命令,具有同样的效果。
不过没关系,点击那个小蚂蚁,执行RROJECT TASKS–》General下面的命令,具有同样的效果。
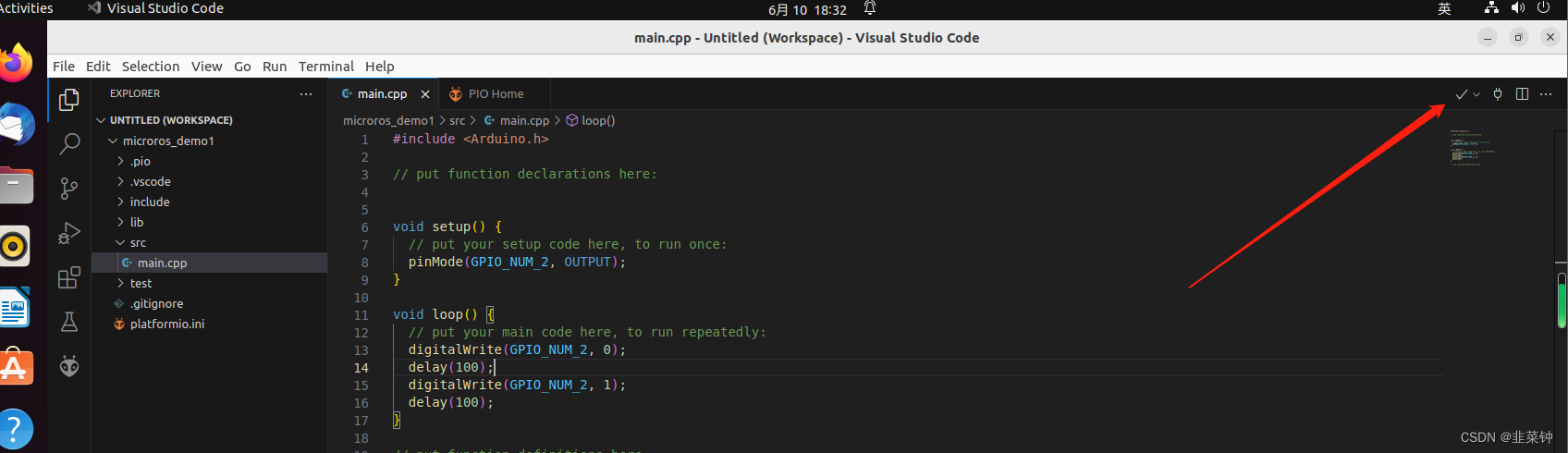
后来又发现在右上角:
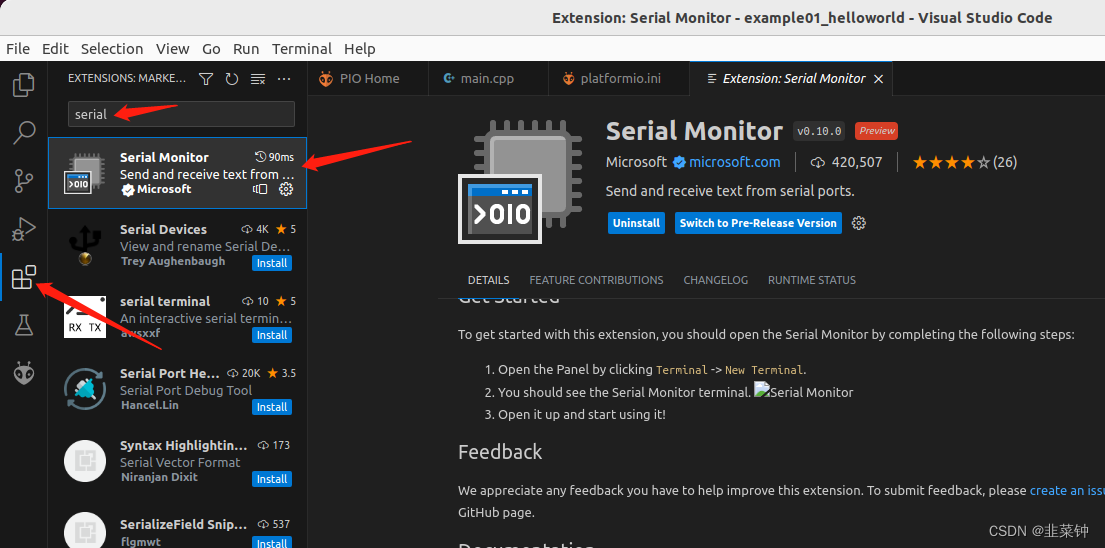
2.在【6.串口通信-接收实验】中,没有串行监视器(Serial Monitor)。
教程中是有这个东西的,但是这边没有。
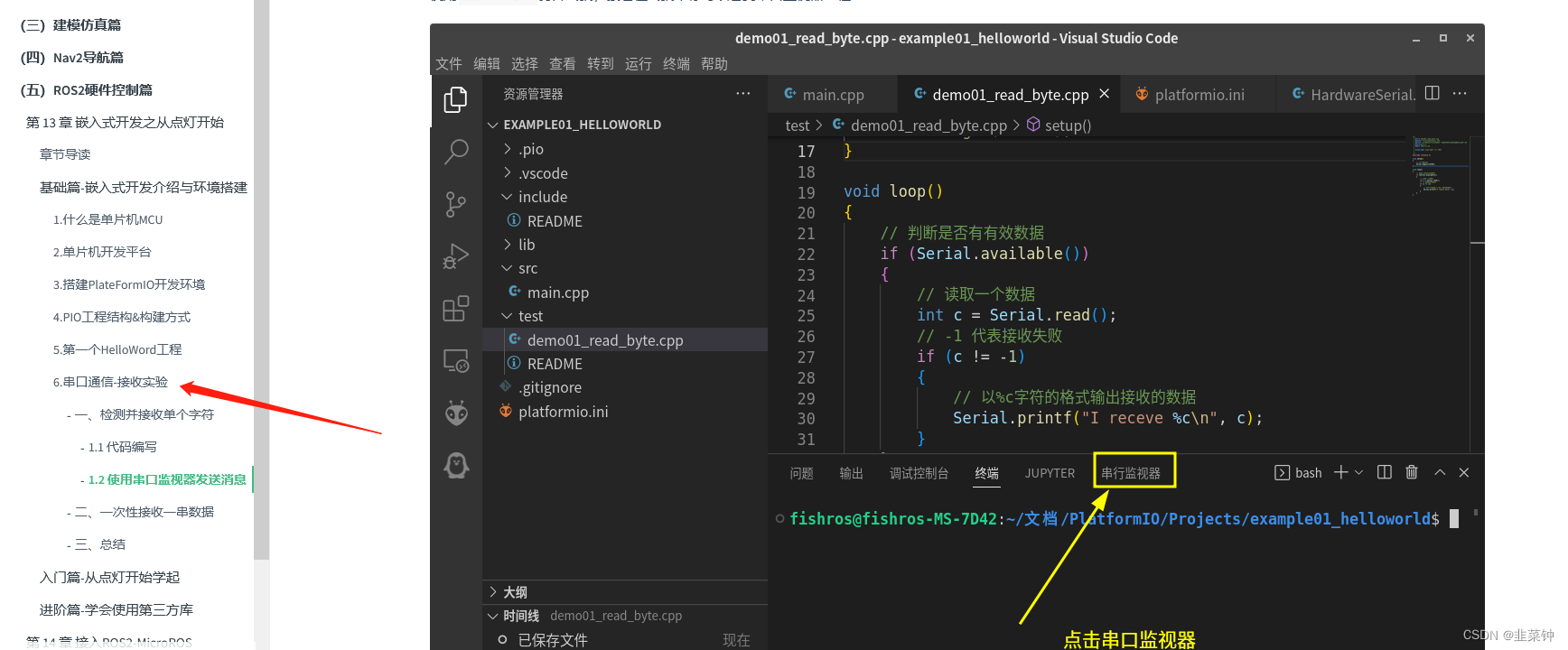 其实这个需要是个独立的拓展,需要自己独立安装。
其实这个需要是个独立的拓展,需要自己独立安装。
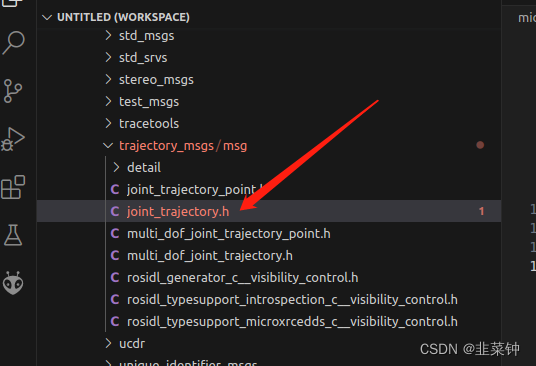
3.关于trajectory_msgs/msg/joint_trajectory.hpp的相关问题
首先我们要明确,microros这个环境基本是基于c开发的,而不是cpp。所以,trajectory_msgs/msg/joint_trajectory.hpp这个cpp下的目录是没有的,取而代之的是trajectory_msgs/msg/joint_trajectory.h
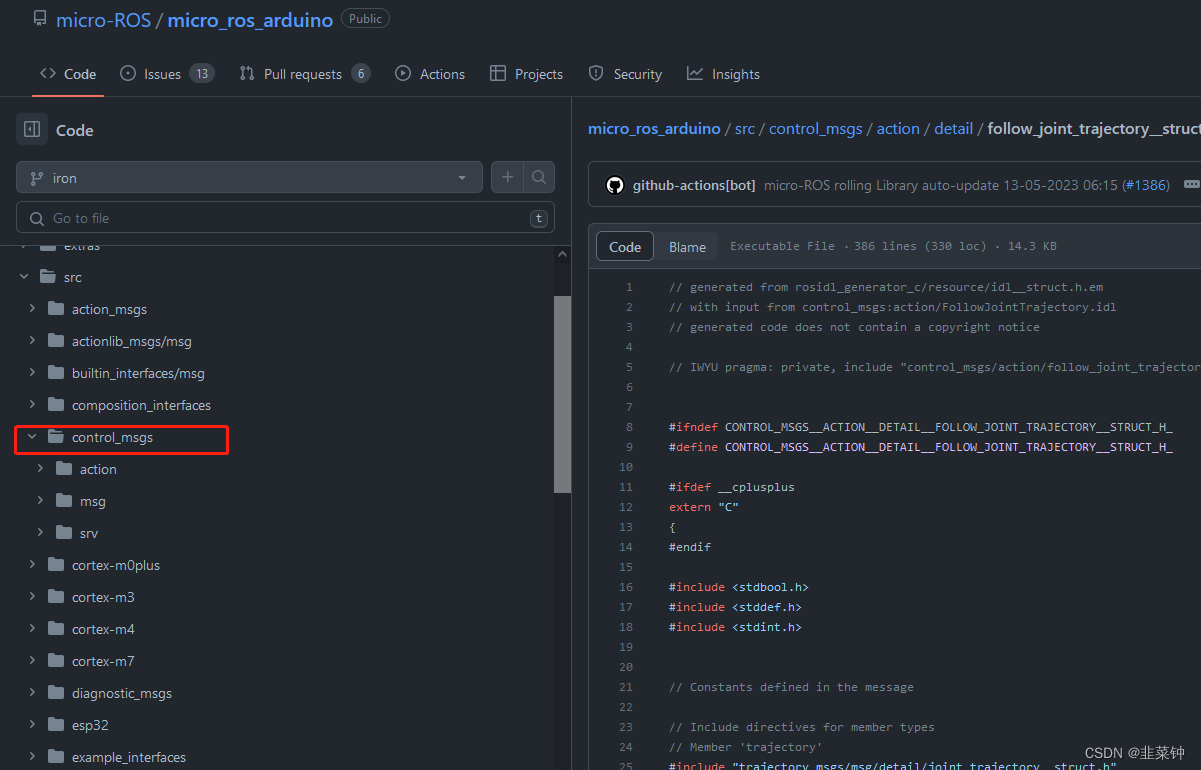
4.关于control_msgs::action::FollowJointTrajectory的相关问题
假如我们想让我们的microros节点直接接入到moveit中,一种比较好的办法是直接在此节点上实现一个action_server,类型为control_msgs::action::FollowJointTrajectory。
但是目前鱼香ros的microros不支持该类型,而官方的也是不支持的(当使用官方的microros时,需要梯子或者fastgithub)。
不知道怎么回事,我看官方的【micro_ros_arduino】是有这个模块的。
 我在上面发起了个提问,到时候再看看。【I couldn’t find the control_msg module in the compiled include folder】
我在上面发起了个提问,到时候再看看。【I couldn’t find the control_msg module in the compiled include folder】
实在没办法的话,可以暂时在电脑端创建个action_server,然后通过用service传给下位机吧。
其他暂时没问题,遇到再补充。