0.基础工程(cubeide串口调试,printf实现,延时函数)
文章目录
- 0.基础工程(cubeide串口调试,printf实现,延时函数)
- 外部时钟源CLOCK(RCC)
- 系统时钟SYS与DEBUG设置
- UART串口设置
- cubeide设置
- 在main函数中打开串口中断接收
- 接收缓冲区定义
- 设置中断服务函数
- 设置串口接收中断回调函数
- 一些发送函数实现
- HAL库中串口接收与发送操作函数
- printf函数的重定义
- 注释syscalls.c中的_write函数
- 在usart.c中重新实现设个函数
- 延时函数
- sys_tick.c
- sys_tick.h
- 代码分析
外部时钟源CLOCK(RCC)
设置外部时钟源

High Speed Clock即为HSE(高速时钟源),一般为接外部晶振为主,因此选择Crystal/Ceramic Resonator(使用晶振/外部陶瓷振荡器)来使用外部晶振。
Low Speed Clock(低速时钟源),若无特殊需求,不用打开。
然后设置时钟频率

设置输入时钟源频率
此图片频率84为方便讲解设置,实际还是按使用频84MHZ来设置!
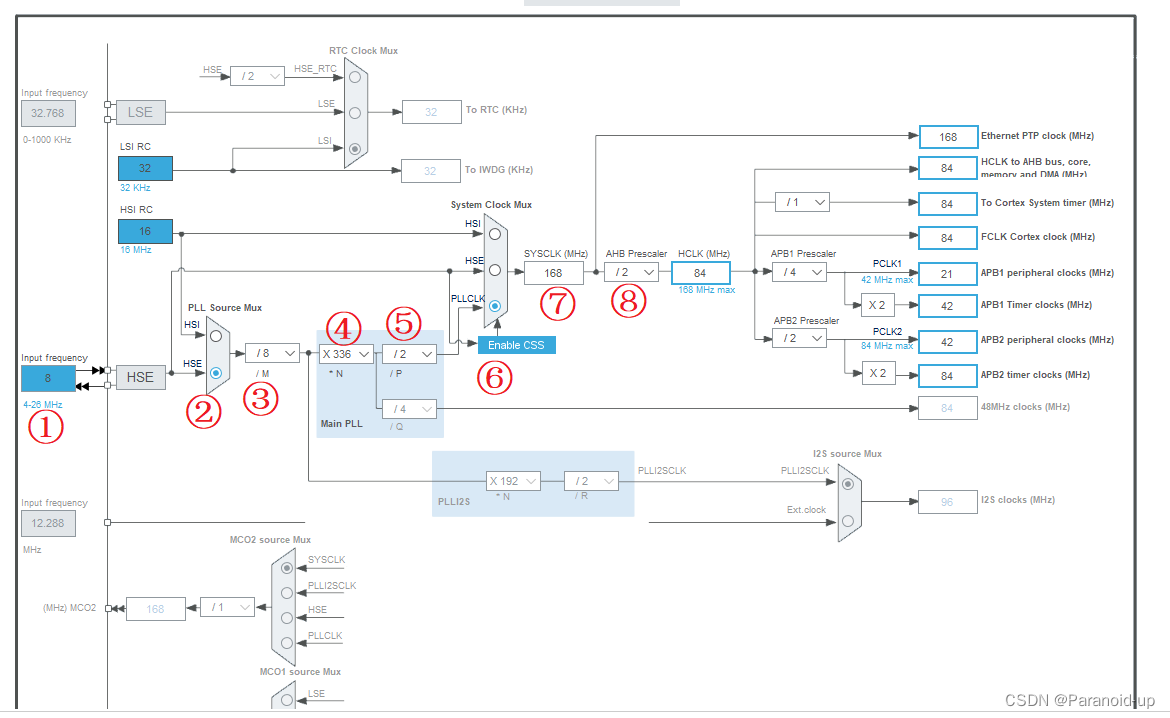
①:Input frequency:输入晶振频率,在这个选项中可根据单片机的外部晶振来填写晶振频率,下面的蓝色范围为可接受频率范围。这边按8MHZ来配。
②:PLL source Mux:PLL时钟源选择器,选择HSE高速时钟源即可。
③:PLL 分频系数 M 配置。由于我们需要系统时钟设为168MHZ,因此需要通过PLL分频来把8MHZ的晶振时钟转换为系统时钟。
④:主 PLL 倍频系数 N 配置。倍频系数 N(自动配频会自动计算)
⑤:主 PLL 分频系数 P 配置。分频系数 P(自动配频会自动计算)
⑥:系统时钟时钟源选择,选择PLLCLK,系统时钟就会和PLL同步为168MHZ
⑦,⑧:SYSCLK系统时钟,引脚的工作频率都由它分频来配置。
系统时钟分频得到的总线时钟:AHB(Advanced High performance Bus,高级高性能总线,用于高性能模块CPU、DMA、DSP之间的连接)、APB1、APB2、APB3和APB总线时钟(Advanced Peripheral Bus,高性能外围总线,用于低带宽的周边外设之间的连接,例如UART)以及Systick时钟的最终来源都是系统时钟SYSCLK。
系统时钟SYS与DEBUG设置


UART串口设置
cubeide设置
在“Mode”一栏中,将“Mode”改为“Asychoronous”异步模式,其他选项不用改动。
可以看到下方会出现串口的详细配置目录,这边选择不改动,使用默认的:
115200HZ波特率,8字符长度,奇偶位None,停止位为1.

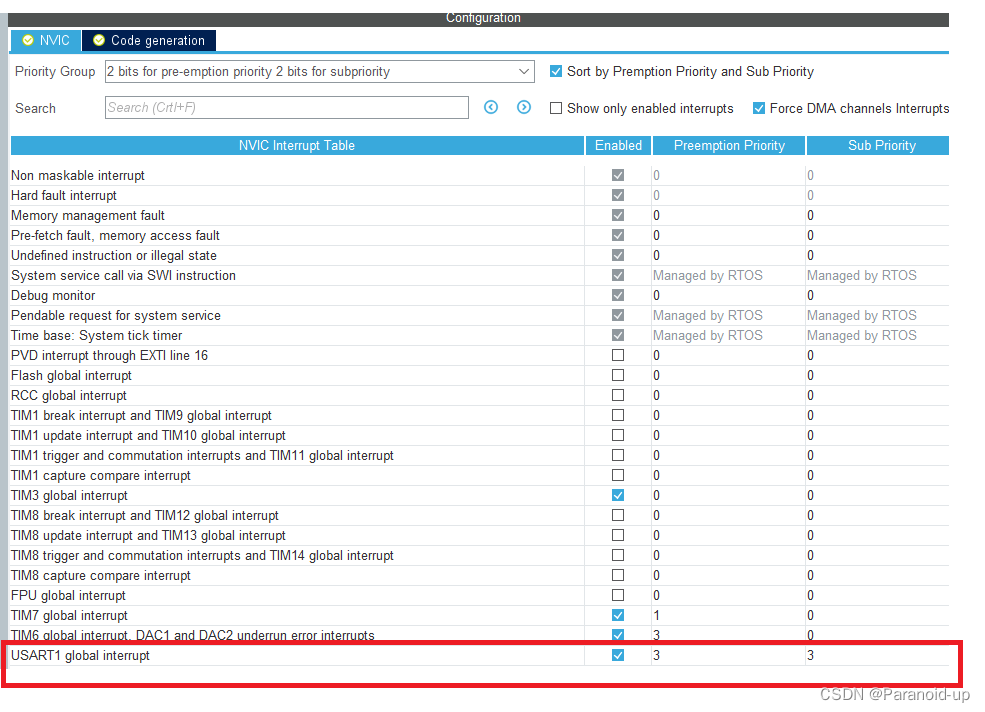
接着点击“NVIC Setting”对串口中断进行配置,打开USART1的中断开关。

并在“NVIC”总中断控制界面将串口中断的优先度设为“3,3”。
软件设置
在main函数中打开串口中断接收
HAL_UART_Receive_IT(&huart1, (uint8_t *)g_rx_buffer, 1); //打开串口中断接收
接收缓冲区定义
/* 串口1,调试串口 ------------------------------------------------------------*/
/* 接收缓冲, */
uint8_t g_usart_rx_buf[USART_REC_LEN]= {0};
uint8_t cp_g_usart_rx_buf[USART_REC_LEN]= {0};
uint16_t g_usart_rx_sta = 0;
uint8_t g_rx_buffer[RXBUFFERSIZE]; /* HAL库使用的串口接收缓冲 */
设置中断服务函数
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
uint32_t timeout = 0;
uint32_t maxDelay = 0x1FFFF;
protocol_data_recv(g_rx_buffer, 1);
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
timeout = 0;
while (HAL_UART_GetState(&huart1) != HAL_UART_STATE_READY) /* 等待就绪 */
{
timeout++; /* 超时处理 */
if(timeout > maxDelay)
{
break;
}
}
timeout=0;
while (HAL_UART_Receive_IT(&huart1, (uint8_t *)g_rx_buffer, RXBUFFERSIZE) != HAL_OK)
{
timeout++; /* 超时处理 */
if (timeout > maxDelay)
{
break;
}
}
//__HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE);
/* USER CODE END USART1_IRQn 1 */
}
设置串口接收中断回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1) /* 接收未完 */
{
if((g_usart_rx_sta & 0x8000) == 0) /* 接收到了0x0d */
{
if(g_usart_rx_sta & 0x4000) /* 接收到了0x0d */
{
if(g_rx_buffer[0] != 0x0a)
{
g_usart_rx_sta = 0; /* 接收错误,重新 */
}else{
g_usart_rx_sta |= 0x8000; /* 接收完成 */
}
}else{ /* 还没收到0X0D */
if(g_rx_buffer[0] == 0x0d)
{
g_usart_rx_sta |= 0x4000;
}else{
cp_g_usart_rx_buf[g_usart_rx_sta & 0X3FFF] = g_rx_buffer[0] ;
g_usart_rx_sta++;
if(g_usart_rx_sta > (USART_REC_LEN - 1))
{
g_usart_rx_sta = 0; /* 接收数据错误,重新 */
}
}
}
}
if (g_usart_rx_sta & 0x8000) {
memcpy(g_usart_rx_buf, cp_g_usart_rx_buf, USART_REC_LEN);
memset(cp_g_usart_rx_buf, 0, USART_REC_LEN);
g_usart_rx_sta = 0;
}
}
}
串口接收到的数据将存放在g_usart_rx_buf中
一些发送函数实现
/***************** 串口1 **********************/
/***************** 发送字符 **********************/
void Usart_SendByte(uint8_t str)
{
HAL_UART_Transmit(&huart1, &str, 1, 1000);
}
/***************** 发送字符串 **********************/
void Usart_SendString(uint8_t *str)
{
unsigned int k=0;
do
{
HAL_UART_Transmit(&huart1,(uint8_t *)(str + k) ,1,1000);
k++;
} while(*(str + k)!='\0');
}
HAL库中串口接收与发送操作函数
/* IO operation functions *******************************************************/
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_Transmit_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_Receive_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_DMAPause(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_DMAResume(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_DMAStop(UART_HandleTypeDef *huart);
/* Transfer Abort functions */
HAL_StatusTypeDef HAL_UART_Abort(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_AbortTransmit(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_AbortReceive(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_Abort_IT(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_AbortTransmit_IT(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_AbortReceive_IT(UART_HandleTypeDef *huart);
void HAL_UART_IRQHandler(UART_HandleTypeDef *huart);
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_ErrorCallback(UART_HandleTypeDef *huart);
void HAL_UART_AbortCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_AbortTransmitCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_AbortReceiveCpltCallback(UART_HandleTypeDef *huart);
这些函数是用于串行通信中的UART(通用异步收发器)操作的函数。
HAL_UART_Transmit: 用于通过UART发送数据。它接收UART句柄指针 huart,数据缓冲区指针 pData,数据长度 Size 和超时时间 Timeout。
HAL_UART_Receive: 用于通过UART接收数据。它接收UART句柄指针 huart,数据缓冲区指针 pData,数据长度 Size 和超时时间 Timeout。
HAL_UART_Transmit_IT: 用于以中断方式通过UART发送数据。与 HAL_UART_Transmit 类似,但不会阻塞主程序的执行。
HAL_UART_Receive_IT: 用于以中断方式通过UART接收数据。与 HAL_UART_Receive 类似,但不会阻塞主程序的执行。
HAL_UART_Transmit_DMA: 用于通过DMA(直接存储器访问)方式通过UART发送数据。这种方法可以实现高效的数据传输,减少CPU的负载。
HAL_UART_Receive_DMA: 用于通过DMA方式通过UART接收数据。与 HAL_UART_Transmit_DMA 类似,但用于接收数据。
HAL_UART_DMAPause: 暂停通过DMA方式传输数据。
HAL_UART_DMAResume: 恢复通过DMA方式传输数据。
HAL_UART_DMAStop: 停止通过DMA方式传输数据。
HAL_UART_Abort: 中止UART通信,停止传输并释放相关资源。
HAL_UART_AbortTransmit: 中止UART发送操作。
HAL_UART_AbortReceive: 中止UART接收操作。
HAL_UART_Abort_IT: 以中断方式中止UART通信。
HAL_UART_AbortTransmit_IT: 以中断方式中止UART发送操作。
HAL_UART_AbortReceive_IT: 以中断方式中止UART接收操作。
上述函数提供了灵活的UART数据传输和操作控制功能,适用于各种应用场景。通过这些函数,可以发送和接收数据,使用不同的传输方式(阻塞、中断、DMA),以及中止或暂停数据传输。此外,还提供了一些回调函数,以便在特定事件发生时进行处理,如传输完成、接收完成、错误处理等。
printf函数的重定义
注释syscalls.c中的_write函数
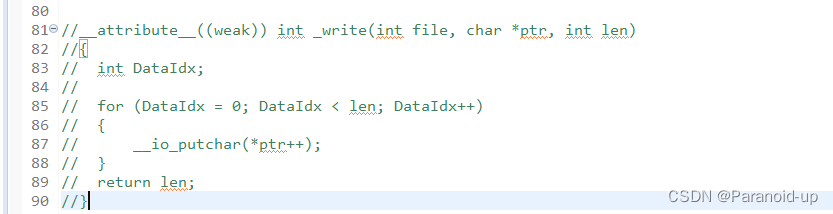
在usart.c中重新实现设个函数
__attribute__((weak)) int _write(int file, char *ptr, int len)
{
if(HAL_UART_Transmit(&huart1,(uint8_t *)ptr,len,0xffff) != HAL_OK)
{
Error_Handler();
}
return len;
}
延时函数
sys_tick.c
/*
* sys_tick.c
*
* Created on: May 31, 2023
* Author: 黎
*/
#include "main.h"
#include "sys_tick.h"
/*
Systick功能实现us延时,参数SYSCLK为系统时钟
*/
uint32_t fac_us;
void HAL_Delay_us_init(uint16_t SYSCLK)
{
fac_us=SYSCLK;
}
void HAL_Delay_us(uint32_t nus)
{
uint32_t ticks;
uint32_t told,tnow,tcnt=0;
uint32_t reload=SysTick->LOAD;
ticks=nus*fac_us;
told=SysTick->VAL;
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow;
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break;
}
};
}
void HAL_Delay_ms(uint32_t nus)
{
uint32_t ticks;
uint32_t told,tnow,tcnt=0;
uint32_t reload=SysTick->LOAD;
ticks=nus * fac_us * 1000;
told=SysTick->VAL;
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow;
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break;
}
};
}
sys_tick.h
/*
* sys_tick.h
*
* Created on: May 31, 2023
* Author: 黎
*/
#ifndef SYS_TICK_H_
#define SYS_TICK_H_
#include "main.h"
#define delay_us HAL_Delay_us
#define delay_ms HAL_Delay_ms
void HAL_Delay_ms(uint32_t nus);
void HAL_Delay_us_init(uint16_t SYSCLK);
void HAL_Delay_us(uint32_t nus);
#endif /* SYS_TICK_H_ */
代码分析
上面的代码是一个用于延时的函数实现,使用了系统的SysTick定时器。
首先,代码定义了一个全局变量fac_us,用于存储每微秒的时钟周期数。
然后,代码包含了两个函数HAL_Delay_us_init和HAL_Delay_us,用于初始化和实现微秒级延时。
HAL_Delay_us_init函数用于初始化延时函数,接受一个参数SYSCLK,表示系统时钟频率。在函数中,将系统时钟频率赋值给fac_us变量。
HAL_Delay_us函数用于实现微秒级延时,接受一个参数nus,表示要延时的微秒数。在函数中,首先计算需要延时的时钟周期数ticks,然后通过循环进行延时。在每次循环中,获取当前的SysTick值,并判断是否发生了溢出。根据当前值和上一次的值计算经过的时钟周期数tcnt,如果经过的时钟周期数达到了目标延时的时钟周期数ticks,则结束延时。
此外,代码还包含了一个HAL_Delay_ms函数,用于实现毫秒级延时,原理与HAL_Delay_us函数类似,只是延时的单位是毫秒。
综上所述,这段代码通过使用SysTick定时器实现了微秒级和毫秒级的延时功能。