ROS——从深度图转换到octomap(C++)
news2026/2/11 2:20:44
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/623769.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

代码随想录算法训练营第五十一天|309.最佳买卖股票时机含冷冻期|714.买卖股票的最佳时机含手续费
LeetCode309.最佳买卖股票时机含冷冻期
动态规划五部曲:
1,确定dp数组以及下标的含义:dp[i][j],第i天状态为j,所剩的最多现金为dp[i][j]。出现冷冻期之后,状态其实是比较复杂度,例如今天买入股…

接口自动化【七】__包装响应结果的数据为key-value
文章目录 前言 一、本章学习的思路 二、用接口新建商品_使用步骤 步骤一:先用抓包的方式拿到新建商品的接口 步骤二:我们先用单接口的形式,把这个商品添加成功 三、处理响应接口_(包装响应结果的数据为…
Flume自定义拦截器 - ETL拦截器和分类拦截器
水善利万物而不争,处众人之所恶,故几于道💦 目录
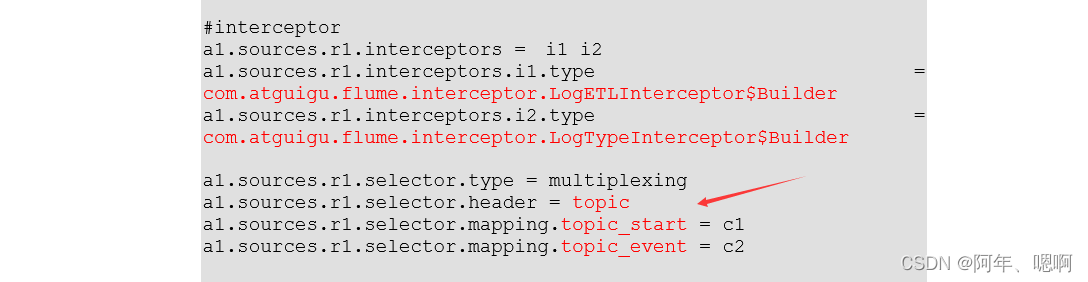
一、拦截器(Interceptor)和选择器(Selector) 拦截器(Interceptor) 选择器(Selector)
二、自定…
【机器学习 | 深度学习】Colab是什么?以及如何使用它?
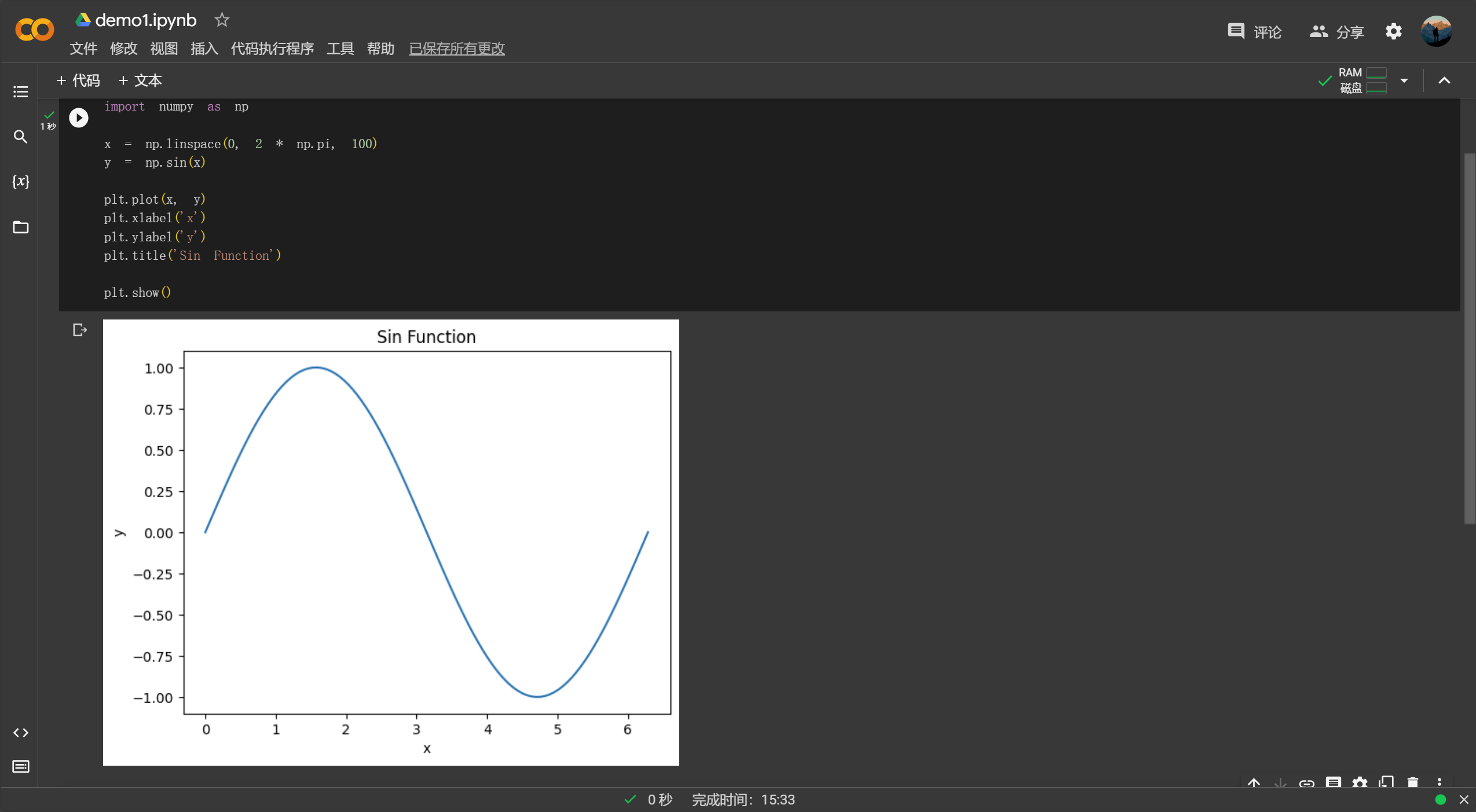
文章目录 一、介绍二、如何使用 Colaboratory 创建代码三、实例测试 一、介绍
Colaboratory(简称为Colab)是由Google开发的一种基于云端的交互式笔记本环境。它提供了免费的计算资源(包括CPU、GPU和TPU),可让用户在浏…
本地部署gitlab学习git使用
文章目录 前言一、安装gitlab二、nginx反向代理三、本地配置hosts,自定义域名四、配置gitlab独立ngxin实现域名访问五、其他总结 前言
最近想学习git使用了,在本地部署一个gitlab社区版玩玩吧~ gitlab只能部署在liunx系统上面,可以使用云服务…
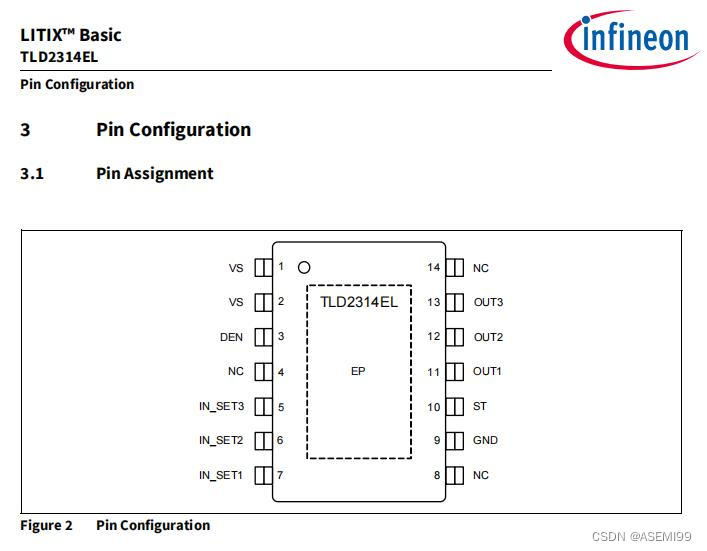
TLD2314EL-ASEMI代理英飞凌汽车芯片TLD2314EL
编辑:ll
TLD2314EL-ASEMI代理英飞凌汽车芯片TLD2314EL
型号:TLD2314EL
品牌:Infineon(英飞凌)
封装:SSOP-14-EP-150mil
特性:LED驱动、汽车芯片
宽温度范围:-40C~150C
封装:SSOP-14&…

虚拟云网络系列 | 如何将 NSX NVDS 迁移到 VDS
1.NVDS 迁移到 VDS 的主要原因
在早期的 vsphere6.7 的版本上安装 NSX-T 采用的都是 NVDS,而随着 NSX 版本的升级,从 NSX 4.0 开始,NSX 已经不在支持在 ESXi 上部署 NVDS,仅能使用 vsphere7.0 上的 VDS。所以,对于早期…

linux系统编程-----下
linux网络编程
tcp通信
Berkeley Socket
TCP/IP协议族标准只规定了网络各个层次的设计和规范,具体实现则需要由各个操作系统厂商完成。最出名的网络库由BSD 4.2版本最先推出,所以称作伯克利套接字,这些API随后被移植到各大操作系统中&…

Android Key Hash生成
在接入FaceBook 安卓第三方登录的时候,就需要获取Debug Android Hash Key。 Android Hah Key有两种,即开发密钥散列和发布密钥散列 获得散列值需要借助openssl工具。
下载并配置openssl
1、下载
到https://code.google.com/archive/p/openssl-for-win…


Roop:单图离线版软件包及使用方法!
你们要的“单图换脸”离线一键运行版来了。Roop发布几十个小时后,马不停蹄地搞了Colab在线版。其实这东西都挺好的,又快又方便,几乎没有任何硬件要求,点一点就可以搞定了。但是它有一个问题,就是没有“魔法” 就没法使…
国际电商网站APP开发-国际电商网站,跨境方案
跨境电商一种在国际贸易中进行电子商务的策略。它涉及到在线销售产品或服务给海外消费者,通常涉及到国际支付、物流和海外市场营销的问题。以下是一些跨境电商方案的例子: 跨境电商平台:建立自己的跨境电商平台,提供海外消费者便捷…
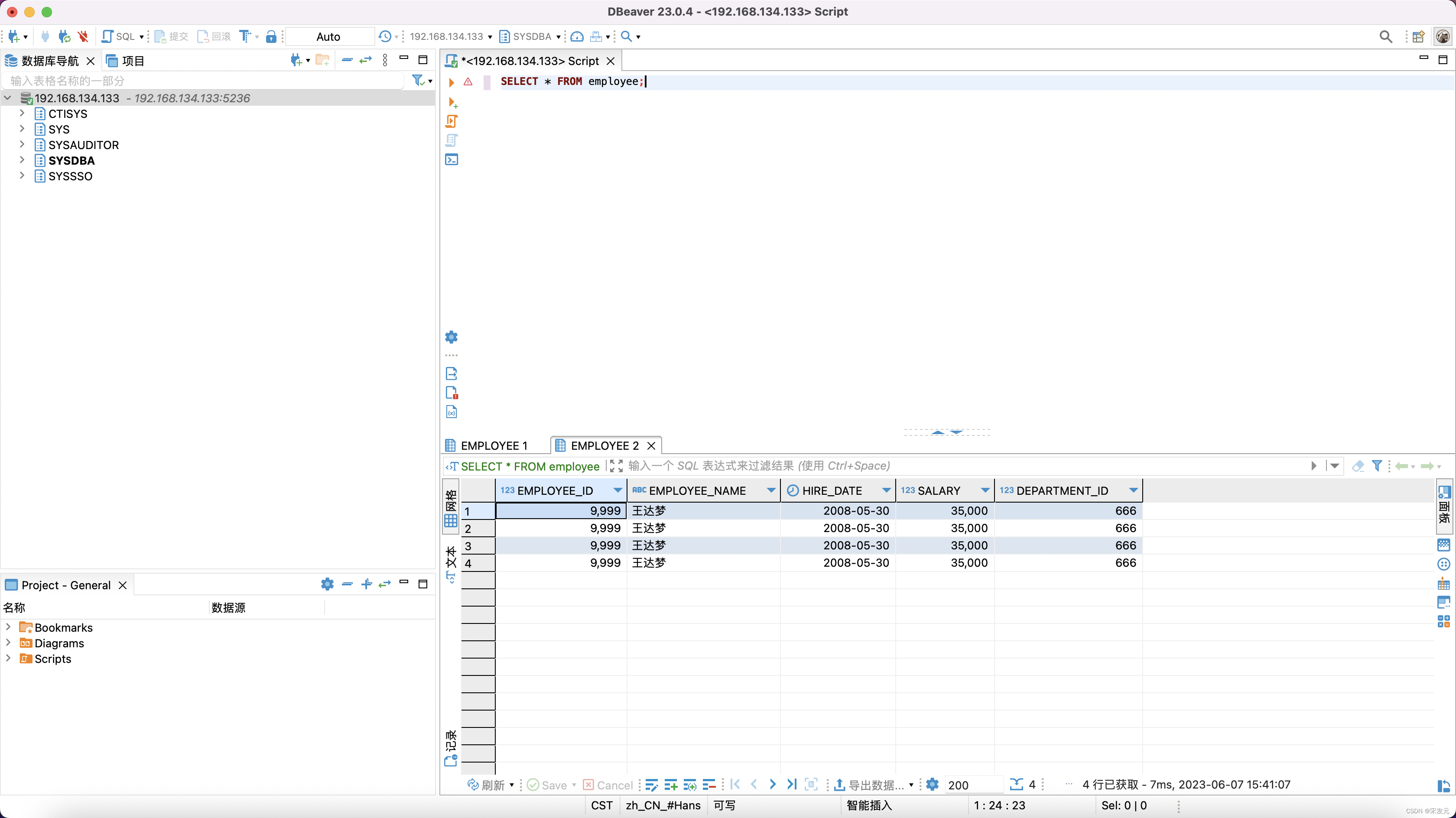
Docker安装达梦(DM)关系型数据库,DBeaver远程连接使用数据库
Docker安装达梦(DM)关系型数据库
首先你得去达梦数据库官网注册一个账号。
下载数据库部署包
官网:https://www.dameng.com/
然后找到需要的数据库: 官网试用地址:https://eco.dameng.com/tour/?source_urlht…
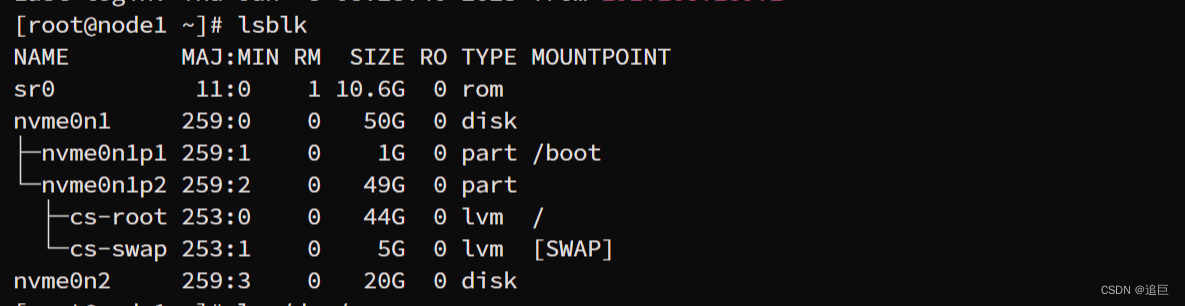
ansible使用剧本操作硬盘
在一个节点添加一块20G的硬盘 通过ansible剧本判断是否存在第二块硬盘,且硬盘的大小大于10G 满足条件: 在此硬盘创建一个分区,大小为10G 使用此分区创建一个卷组 从此卷组中创建一个逻辑卷 将此逻辑卷格式化为xfs 将此逻辑卷挂载至/mountdir目…
上海28岁程序员失业,感叹:测试估计没戏了,想去卖点煎饼果子养家~
程序员危机,似乎是一个跨不过去的坎,最近,在职场论坛上看到了一位魔都程序员被裁的帖子,现在因为“互联网寒冬”不少程序员优化被裁。 帖子具体内容如下:因为疫情,老大哥所在部门被砍掉了,部门所…

科技项目验收测试报告获取有什么注意事项?作用都有哪些?
当科技项目通过测试并准备交付验收时,需要编写科技项目验收测试报告。科技项目验收测试报告是项目验收的重要部分,是对项目质量的一种客观证明。获取科技项目验收测试报告需要注意什么呢?本文从专业角度探讨这个话题,并介绍验收测试报告的作…
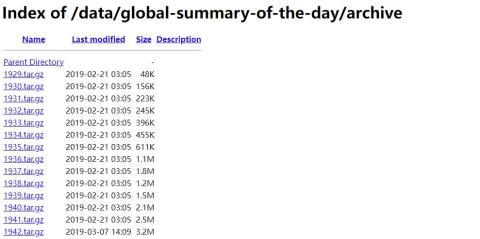
【数据分享】1929-2022年全球站点的逐日降水量(Shp\Excel\12000个站点)
气象数据是在各项研究中都经常使用的数据,气象指标包括气温、风速、降水、湿度等指标,说到常用的降水数据,最详细的降水数据是具体到气象监测站点的降水数据!
有关气象指标的监测站点数据,之前我们分享过1929-2022年全…

069:cesium围绕一个固定点自动左右旋转
第069个 点击查看专栏目录 本示例的目的是介绍如何在vue+cesium中设置一个固定点为中心点,通过lookAtTransform来固化点,通过监听clock,来设置自动旋转。
直接复制下面的 vue+cesium源代码,操作2分钟即可运行实现效果. 文章目录 示例效果配置方式示例源代码(共79行)相关…
网络安全怎么入行?有哪些误区需要避免?
目录
一、学习网络安全容易造成的误区
二、学习网络安全的基本准备与条件
三、网络安全学习路线
第一步:计算机基础
第二步:编程能力
第三步:安全初体验
第四步:分方向
怎么入门?
四、明确目标,定…
硬核科普:“画”说业界首个算网大脑
数字经济时代
算力已经成为核心生产力
中国移动提出“算力网络”全新理念
创新构建“连接算力能力”
新型信息服务体系 作为数字中国建设的国家队、主力军
中国移动布局算力网络的先锋队
移动云依托集团运营商禀赋优势
构建“4N31X”分布式云资源布局 为推动算力一点接入…