tb6612电机驱动与JGB37-520减速直流电机
文章目录
- tb6612电机驱动与JGB37-520减速直流电机
- 电机驱动模块TB6612
- TB6612的引脚说明
- 真值表(直流电机的驱动状态)
- TB6612的正转反转原理
- 直流电机原理
- 减速器
- 编码器
- 一、关于编码器的介绍
- 二、编码器的工作原理(正交式)
- 三、编码器电机的配置
- 电机部分参数
电机驱动模块TB6612
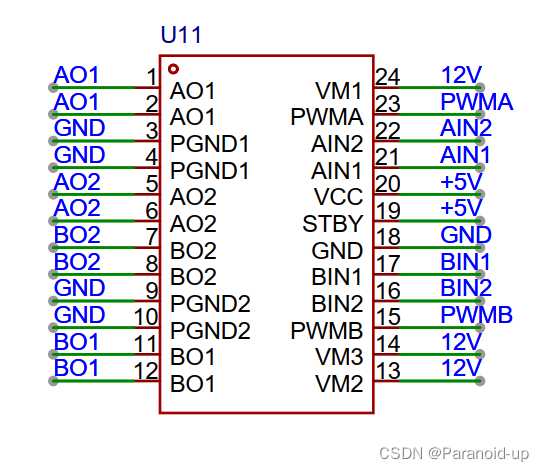
TB6612的引脚说明

注意:
TB6612中A和B各为驱动一组电机的输入端和输出端。
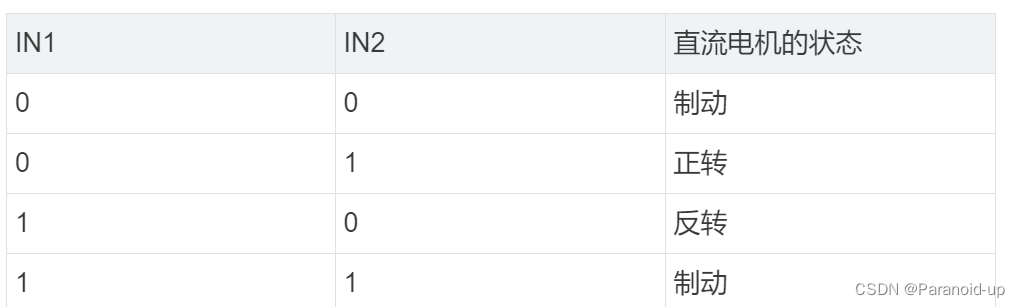
真值表(直流电机的驱动状态)
以下是TB6612 模块测试一个电机的接线图:
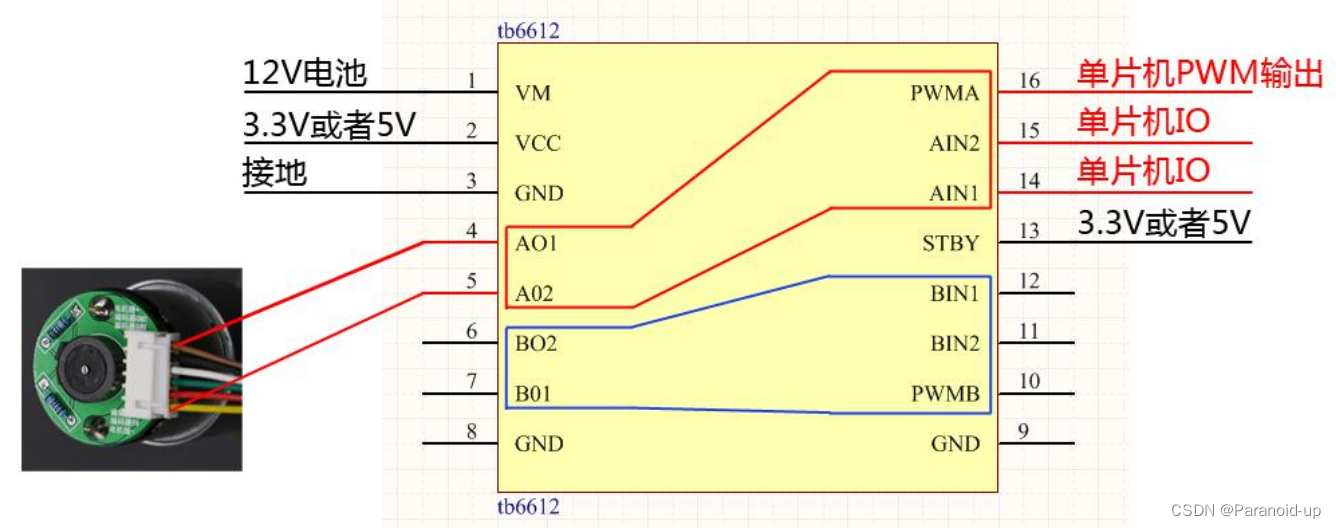
VM直接接电池即可,VCC 是内部的逻辑供电,一般给3.3 或者5V 都行,模块的3 个GND 接任意一个即可,因为都是导通的,STBY置高模块才能正常工作。
完成上面的接线之后,我们就可以开始控制电机了,上图中红色部分的5个引脚控制一路电机,蓝色部分的控制另外一路电机,这里只讲其中的A 路,B路的使用是一样的。AO1 和AO2 分别接到电机的+和-。然后通过PWMA、AIN2、AIN1控制电机。其中PWMA 接到单片机的PWM 引脚,一般10Khz 的PWM 即可,并通过改变占空比来调节电机的速度。下面是真值表:
注意:
该驱动模块为高电平时有效,否则,直流电机处于停止状态。
TB6612的正转反转原理
TB6612FNG是基于MOSFET组成的H桥驱动电路(MOSFET的功能和三极管比较相似,所以按照三极管去理解它的导通情况)

直流电机原理
下面是分析直流电机的物理模型图。其中,固定部分有磁铁,这里称作主磁极;固定部分还有电刷。转动部分有环形铁心和绕在环形铁心上的绕组。(其中2个小圆圈是为了方便表示该位置上的导体电势或电流的方向而设置的)
它的固定部分(定子)上,装设了一对直流励磁的静止的主磁极N和S,在旋转部分(转子)上装设电枢铁心。在电枢铁心上放置了两根导体连成的电枢线圈,线圈的首端和末端分别连到两个圆弧形的铜片上,此铜片称为换向片。换向片之间互相绝缘,由换向片构成的整体称为换向器。换向器固定在转轴上,换向片与转轴之间亦互相绝缘。在换向片上放置着一对固定不动的电刷B1和B2,当电枢旋转时,电枢线圈通过换向片和电刷与外电路接通。
在电刷上施加直流电压U,电枢线圈中的电流流向为:N极下的有效边中的电流总是一个方向,而S极下的有效边中的电流总是另一个方向。这样两个有效边所受的洛伦兹力的方向一致(可以根据左手法则判定),电枢开始转动。
具体来说就是,把上图中的+和-分别接到电池的正极和负极,电机即可转动;如果是把上图中的+和-分别接到电池的负极和正极,则电机会反方向转动。电机的转速可以理解为和外接的电压是正相关的(实际是由电枢电流决定)。
总而言之,如果我们可以调节施加在电机上面的直流电压大小,即可实现直流电机调速,改变施加电机上面直流电压的极性,即可实现电机换向。

减速器
一般直流电机的转速都是一分钟几千上万转的,所以一般需要安装减速器。减速器是一种相对精密的机械零件,使用它的目的是降低转速,增加转矩。减速后的直流电机力矩增大、可控性更强。按照传动级数不同可分为单级和多级减速器;按照传动类型可分为齿轮减速器、蜗杆减速器和行星齿轮减速器。
齿轮减速箱体积较小,传递扭矩大,但是有一定的回程间隙。
蜗轮蜗杆减速机的主要特点是具有反向自锁功能,可以有较大的减速比,但是一般体积较大,传动效率不高,精度不高。
行星减速机其优点是结构比较紧凑,回程间隙小、精度较高,使用寿命很长,额定输出扭矩可以做的很大,但价格略贵。

编码器
一、关于编码器的介绍

编码器是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。按照读出方式编码器可以分为接触式和非接触式两种;按照工作原理编码器可分为增量式和绝对式两类。
增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
按照原理可分为(常见的)
1,光电编码器(光学式),
2,触点电刷式
3,霍尔编码器(磁式)。
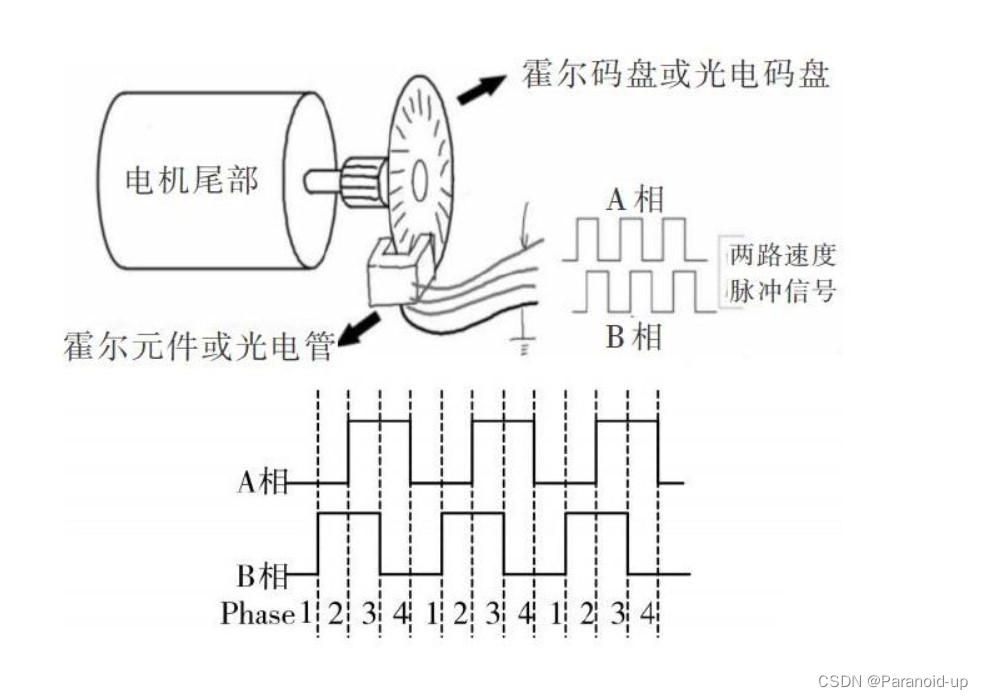
二、编码器的工作原理(正交式)
编码器能够将电机的机械几何位移转化为脉冲信号或数字量。本实验采用的编码器为增量式编码器,增量式编码器通常有两个输出信号,分别为A相和B相。电机带动霍尔码盘转动,在码盘的结构位上将电机在转动时会产生A、B两相的脉冲信号,且这两路脉冲信号的相位差为90度(即正交)配置定时器进行捕获计数,测得脉冲频率,再根据脉冲序列的频率确定电机的转速。同时,在此过程中,A,B相位触发的先后顺序可以确定转动的正反方向。
stm32F4定时器中部分定时器提供了编码器模式,可大大简化解析过程。
高级定时器TIM1和TIM8,通用定时器TIM2-TIM5支持定位用增量(正交)编码器和霍尔传感器电路。
三、编码器电机的配置

M1与M2为电机电源,通过TB6612FNG等电机驱动输出PWM信号,减速电机的转速。
M1与M2,高/低电平决定电机转动的方向(测试电机:直接向其接入12V以下电源,另一端接地,反之反转)
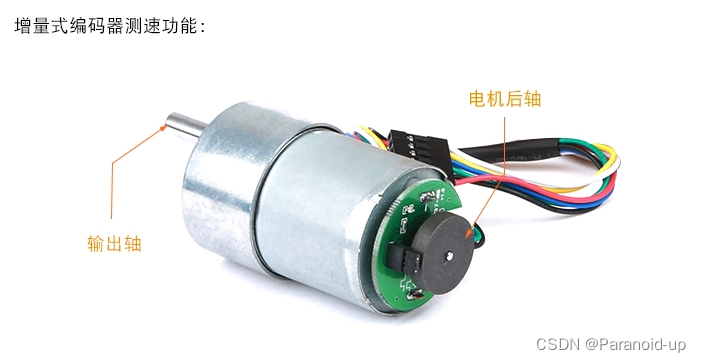
中间部分为编码盘部分与减速电机可区别开:
GND----接地 VCC----接电源3.3V
C1----霍尔编码器A相位 C2----霍尔编码器B相位
霍尔传感器编码器的测速模块,配有 11 线强磁码盘,A B 双相输出 共同利用下,通过计算可得出车轮转一圈时,脉冲数可达30112=660个,单相也可以达到 330 个.(减速比为30:1)(根据自己电机情况来)
关于编码器的工作模式:
模式1,即计数器仅在TI1的边沿处计数;
模式2,即计数器仅在TI2的边沿处计数;
模式3,即定时器在TI1、TI2双边沿处计数(具体请参考stm32f4系列中文参考手册)
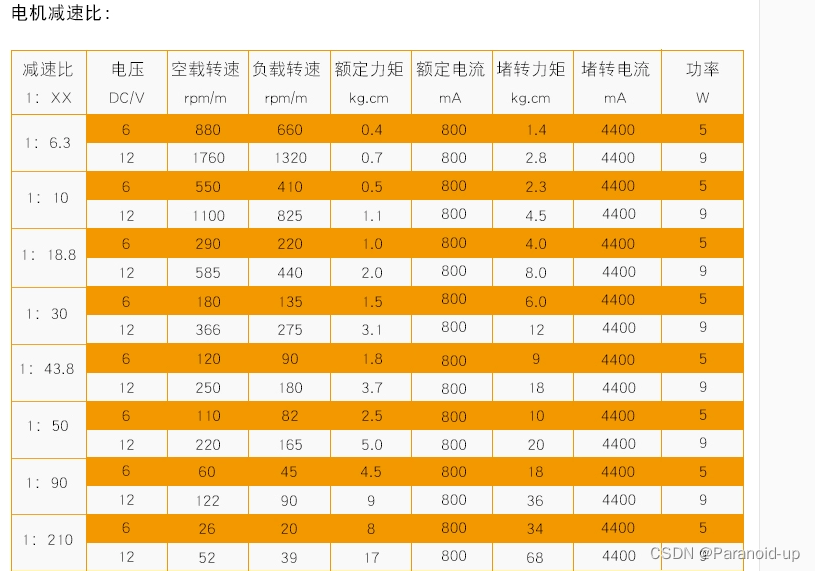
电机部分参数


内容部分来源网络