最小二乘定权、电离层对流层改正,都需要卫星的高度角、方位角。本章将介绍求解完卫星的地固坐标系的位置后,如何求解卫星的高度角、方位角。
卫星位置求解请参考之前的博客:卫星位置解算原理与程序设计
参考书籍:黄丁发,熊永良,周乐韬等,GPS卫星导航定位技术与方法,科学出版社。
目录
公式原理
程序设计(C语言)
公式原理
站心坐标系也称NEU坐标系或东北高坐标系,在地球上任一点观测卫星时,最直观和最方便的办法是知道卫星所在的瞬时位置的方位和仰角。因此,需将卫星的地固坐标系转化成站心坐标系。
站心直角坐标系是以测站为坐标原点的左手坐标系,其N轴指向过该测站的子午线,北向为正;U轴重合与该点上WGS84椭球法线,向外为正;E轴位于该点的切平面,东向为正,如下图所示:
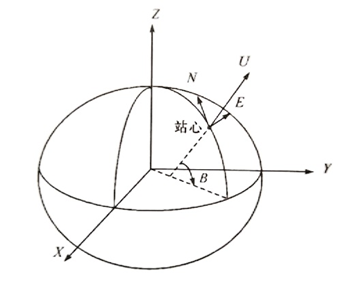
站心坐标系常用极坐标表示(方位角A、高度角h、向径r),如下图所示:

建立以已知测站点为原点的站心直角坐标系,则卫星在该坐标系的坐标为:
![]()
式中:为卫星在地固系中的坐标向量;
为测站在地固坐标系中的坐标向量;
为卫星在站心坐标系中的坐标向量;R为旋转矩阵,即:
![]()


式中:B,L为测站的大地维度和大地精度。
卫星从站心直角坐标系转换到站心极坐标系的公式为:
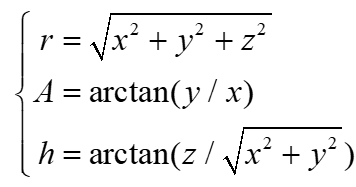
式中:r为卫星向径,A为卫星方位角,h为卫星的高度角。
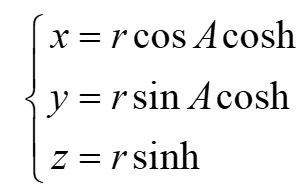
卫星从站心极坐标系转到站心直角坐标系的公式为:
程序设计(C语言)
根据上述公式,求解卫星的站心极坐标需要8个参数:卫星地固坐标系xyz,测站地固坐标系xyz,以及测站经纬度BL(B表示维度,L表示经度)。
#define PI 3.141592653589793
//计算卫星高度角(弧度)
RAH satrah(double Xr, double Yr, double Zr, double Xs, double Ys, double Zs, double Lr, double Br)
{
RAH rah = { 0 };
int i;
double** R, ** X, ** res;
R = (double**)malloc(sizeof(double*) * 3);
X = (double**)malloc(sizeof(double*) * 3);
res = (double**)malloc(sizeof(double*) * 3);
if (R)
{
for (i = 0; i < 3; i++)
{
R[i] = (double*)malloc(sizeof(double) * 3);
X[i] = (double*)malloc(sizeof(double) * 1);
res[i] = (double*)malloc(sizeof(double) * 3);
}
}
//构建旋转矩阵R
R[0][0] = -sin(Lr);
R[0][1] = cos(Lr);
R[0][2] = 0;
R[1][0] = -sin(Br) * cos(Lr);
R[1][1] = -sin(Br) * sin(Lr);
R[1][2] = cos(Br);
R[2][0] = cos(Br) * cos(Lr);
R[2][1] = cos(Br) * sin(Lr);
R[2][2] = sin(Br);
//构建X向量
X[0][0] = Xs - Xr;
X[1][0] = Ys - Yr;
X[2][0] = Zs - Zr;
res = Matrix_Mul(R, X);
rah.h = atan2(res[2][0],sqrt(pow(res[0][0], 2) + pow(res[1][0], 2)));
if (rah.h < 0)
rah.h += PI / 2;
rah.A = atan2(res[1][0], res[0][0]);
if (rah.A < 0)
rah.A += 2*PI;
if (rah.A > 2 * PI)
rah.A -= 2*PI;
rah.r = sqrt(pow(res[0][0], 2) + pow(res[1][0], 2) + pow(res[2][0], 2));
free(R);
free(X);
free(res);
return rah;
}1)RAH为用于传参的结构体,代码如下:
//卫星极坐标函数传参
typedef struct RAH
{
double r;
double A;
double h;
}RAH;2)Matrix_Mul为自行编写的矩阵乘法函数,具体代码请见C语言矩阵乘法
3)atan2为四象限反正切函数(atan,atan2并不相同),三角函数单位均为弧度
4)高度角h范围在0~90°;若高度角h<0,h=h+pi
5)方位角A范围在0~360°;若A<0,A=A+2pi;若A>2pi,A=A-2pi
6)务必释放内存!