💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
异步电动机使用交流电源属于交流电动机 ,由于其工作原理也称感应电动机。
异步电动机常见的有单相、两相、三相等,一般用途如下:
- 三相电机:生产中作为动力使用 。
- 两相电机:两相伺服电动机 。
- 单相电机:使用单相电源的家用电器和小设备
定子(固定部分)
定子硅钢片冲压而成,硅钢片为软磁材料,磁导率高,磁滞损耗小。定子上绕有铜质绕组。
定子铁心、定子绕组也有三相、两相、单相的区分。

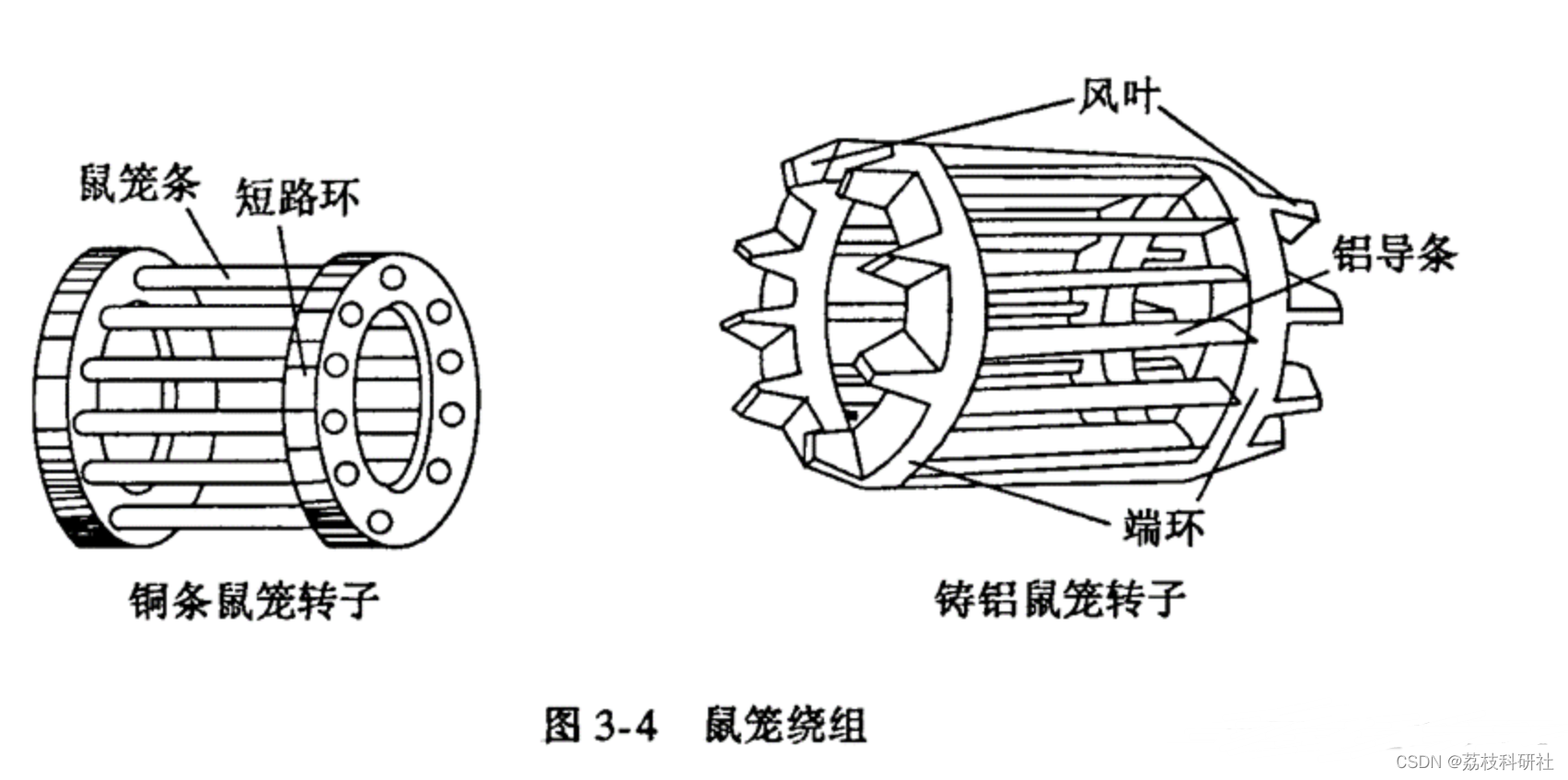
转子(旋转部分)
由铁芯和绕组、转轴构成,有鼠笼式和绕线式两种。铁芯由硅钢片冲制而成。笼式绕组使用较多。
- 笼式:构造简单,工作可靠。
- 绕线式:结构复杂,造价高。
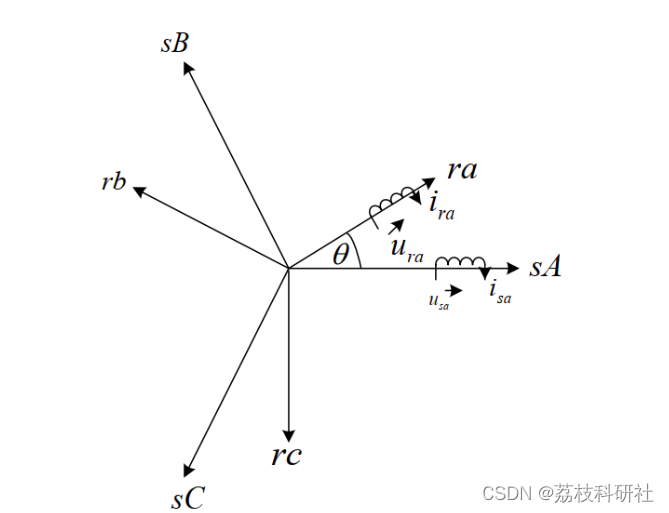
电机的电压方程是一个六阶的数组,相对dq轴的电压模型来说模型阶层是较高的,这也是后续需要进行坐标变换的原因。式中 Rs 和 Rr 分别为定子电阻和折算到定子侧的转子电阻;is(abc)为定子三相电流;ir(abc)为折算到定子侧的转子三相电流;p为微分算子;phis(abc)为三相定子磁链;phir(abc)为折算到定子侧的三相转子磁链。
根据电机各绕组的空间位置,假设电机各相绕组如下图所示:
📚2 运行结果

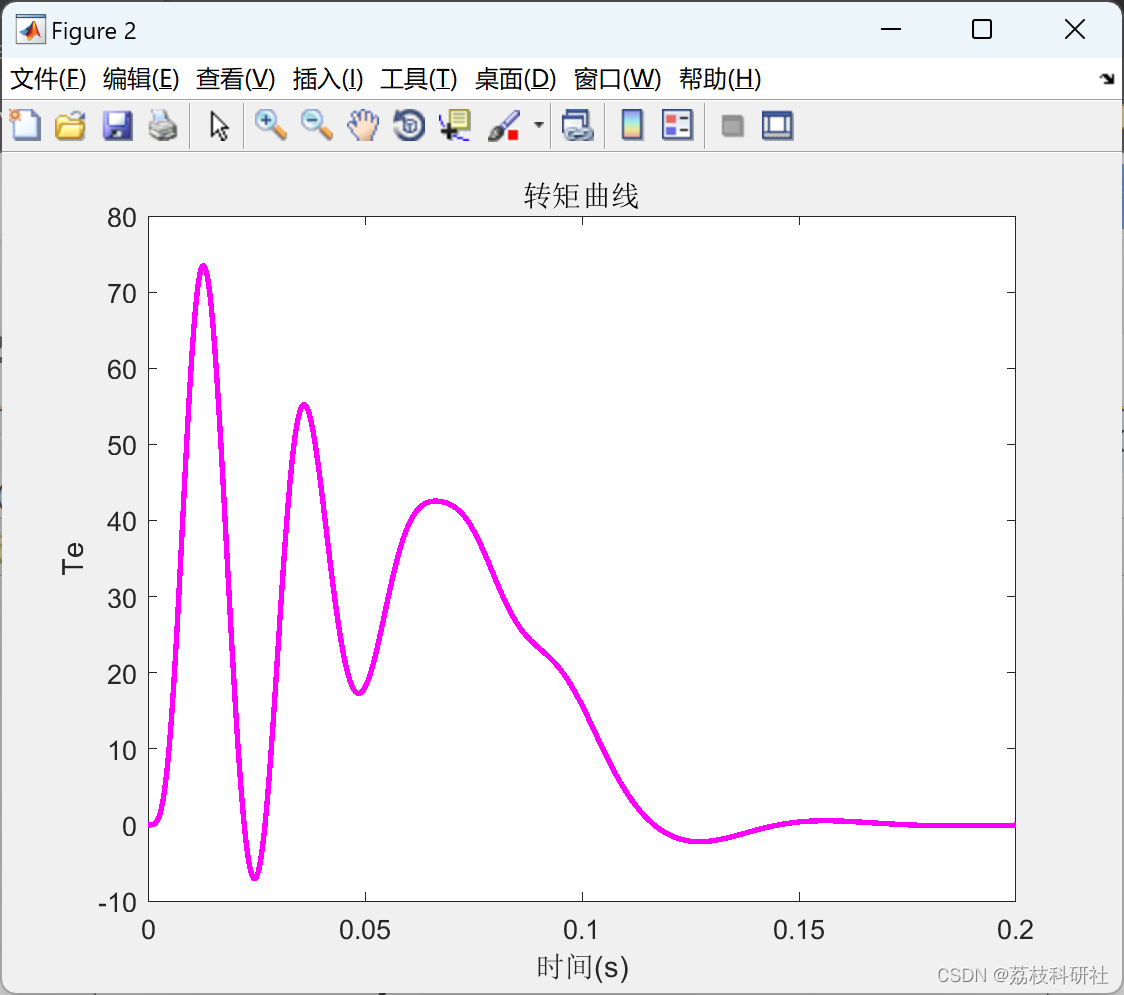
部分代码:
%% 计算电感矩阵
L=[LAA,M12,M12,Lms*cos(Theta),Lms*cos(Theta+ANG),Lms*cos(Theta-ANG);
M12,LAA,M12,Lms*cos(Theta-ANG),Lms*cos(Theta),Lms*cos(Theta+ANG);
M12,M12,LAA,Lms*cos(Theta+ANG),Lms*cos(Theta-ANG),Lms*cos(Theta);
Lms*cos(Theta),Lms*cos(Theta-ANG),Lms*cos(Theta+ANG),Laa,M12,M12;
Lms*cos(Theta+ANG),Lms*cos(Theta),Lms*cos(Theta-ANG),M12,Laa,M12;
Lms*cos(Theta-ANG),Lms*cos(Theta+ANG),Lms*cos(Theta),M12,M12,Laa;
];
%% 计算电感矩阵的L的逆
L_INV=inv(L);
%% 计算L对THEta的倒数
DL_Theta=Lms*[0,0,0,-sin(Theta),-sin(Theta+ANG),-sin(Theta-ANG);
0,0,0,-sin(Theta-ANG),-sin(Theta),-sin(Theta+ANG);
0,0,0,-sin(Theta+ANG),-sin(Theta-ANG),-sin(Theta);
-sin(Theta),-sin(Theta-ANG),-sin(Theta+ANG),0,0,0;
-sin(Theta+ANG),-sin(Theta),-sin(Theta-ANG),0,0,0;
-sin(Theta-ANG),-sin(Theta+ANG),-sin(Theta),0,0,0];
%% 计算电流倒数
dy(1:6)=L_INV*(-(R+Omega*DL_Theta)*i+u);
%% 计算角速度导数
dy(7)=pn/J*(0.5*pn*i'*DL_Theta*i-Romega*Omega/pn-TL );
%% 计算转角导数
dy(8)=y(7);
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]杨秀玲,吉微,李晓明,王春雨,赵永华.三相感应电动机起动动态过程仿真软件的开发[J].电机技术,2011(02):34-37.
[1]李贤明,吴德忠,李丽.感应电动机起动性能的仿真研究[J].防爆电机,2004(02):18-21.