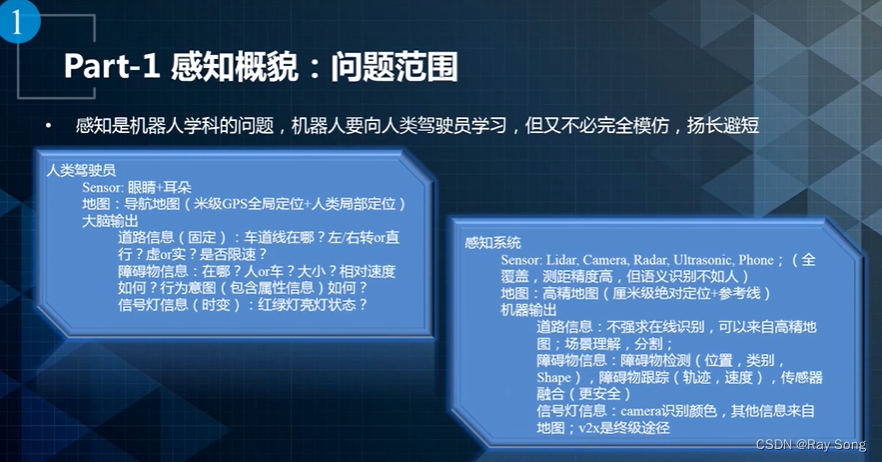
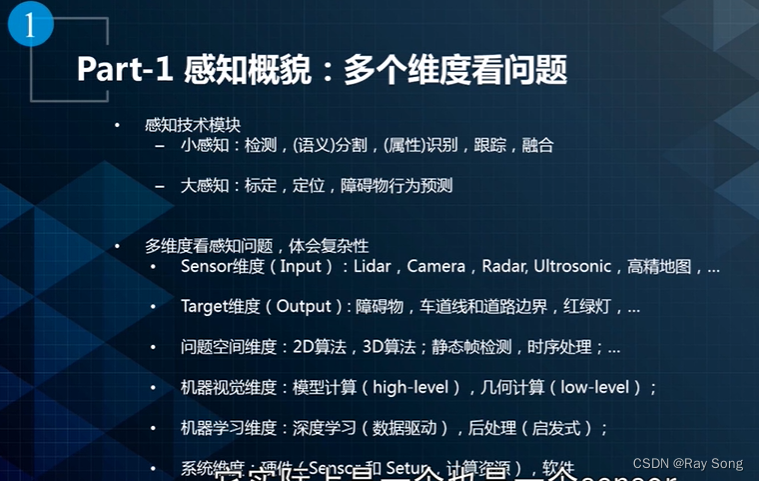
1. 感知概貌
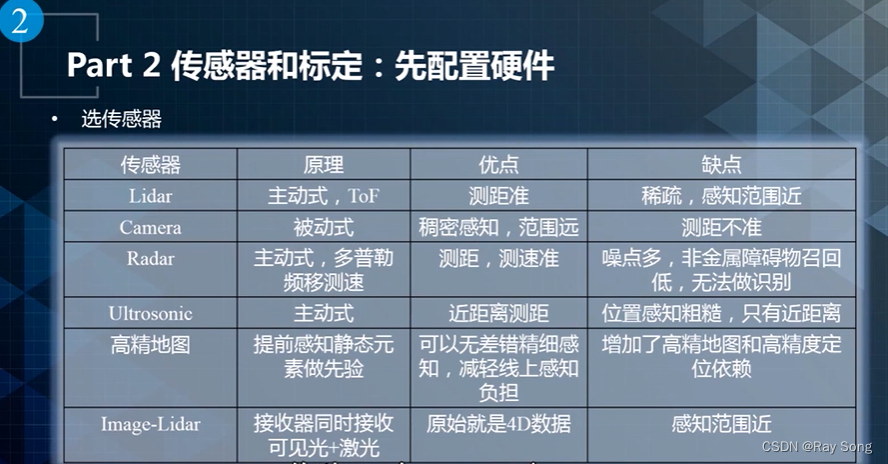
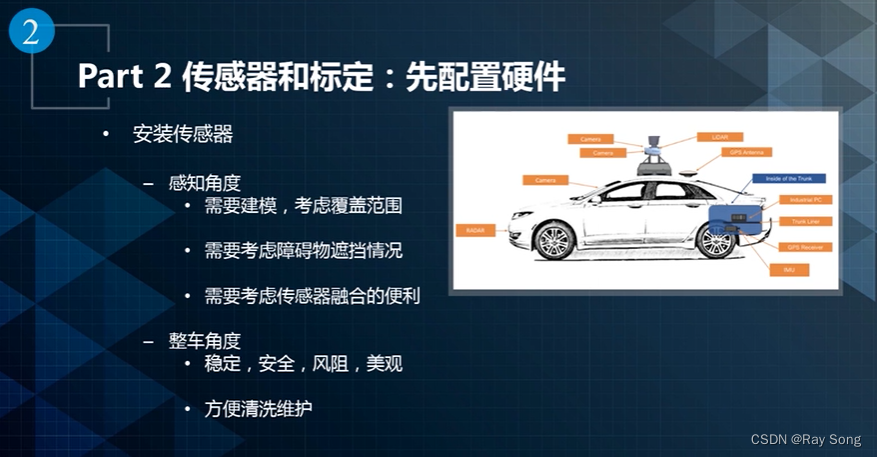
2. 传感器和标定
激光雷达:主动式,发射功率限制
Camera: 被动式,受到光照影响大
Radar : 多普勒效率 相对速度
超声波: 感知距离有限,倒车时使用。
…
最后设备还在研发过程中。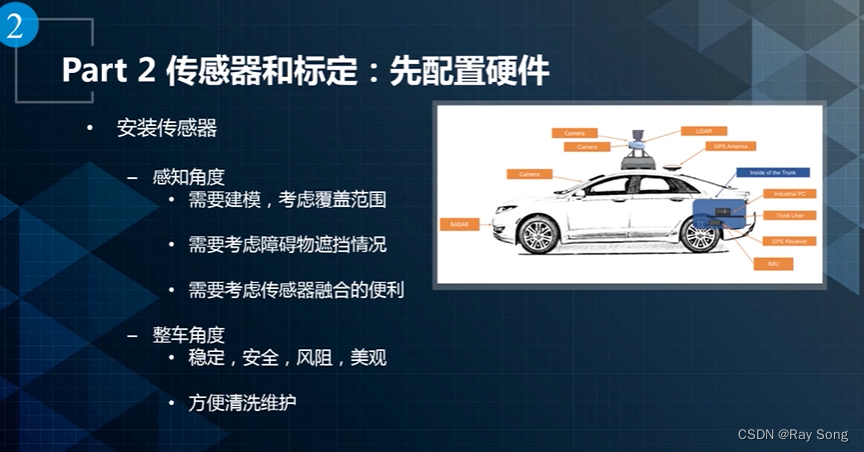
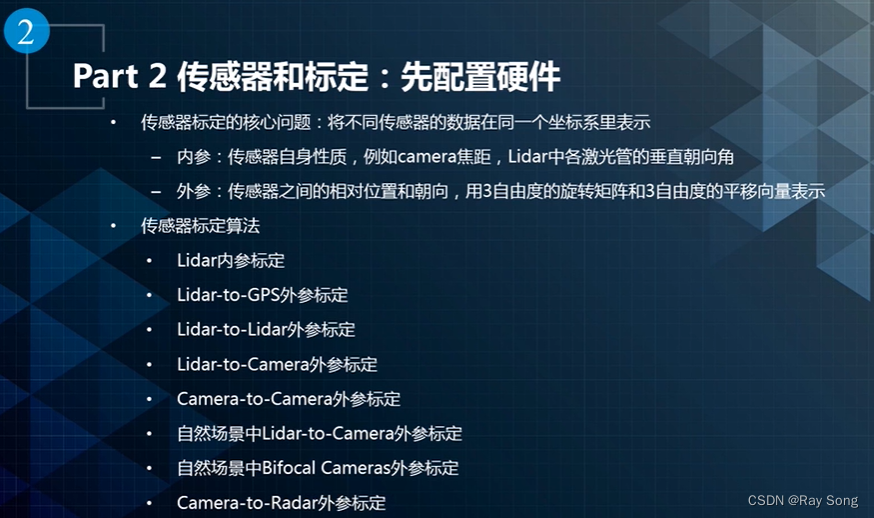
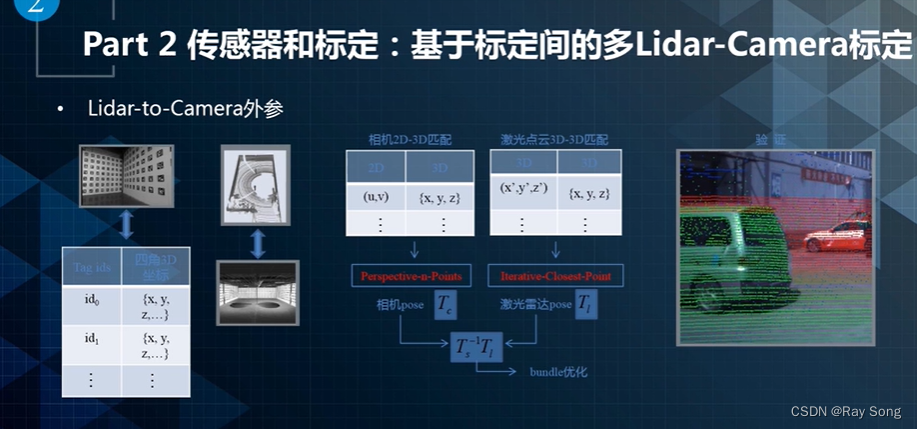
PnP问题,解决标定。
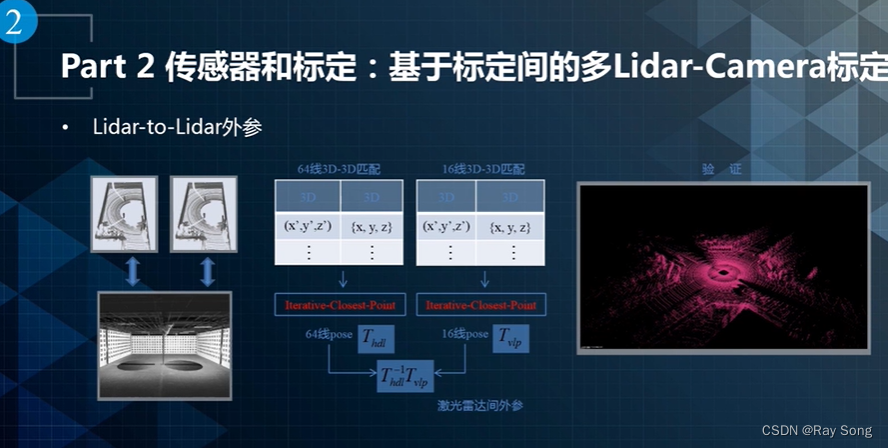
ICP
GPS和LiDAR
利用道路边缘信息等。
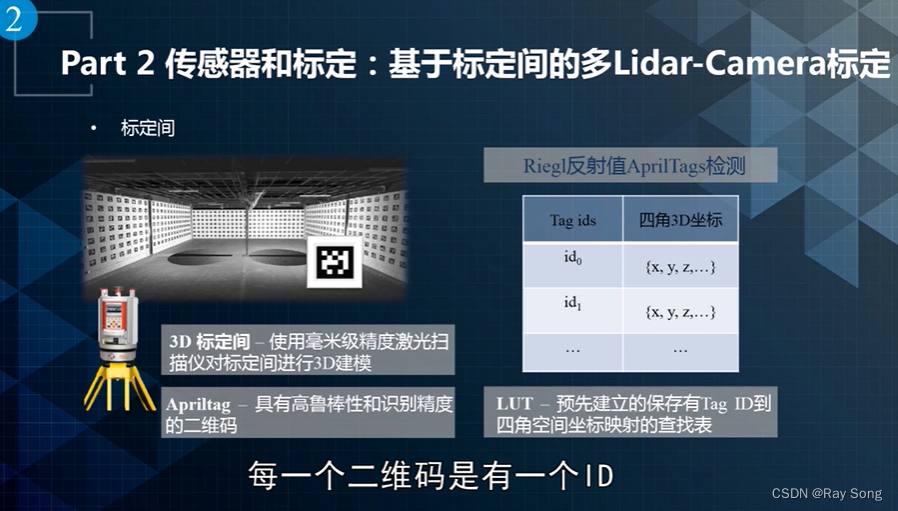
核心:找共同标志物,求优化问题。
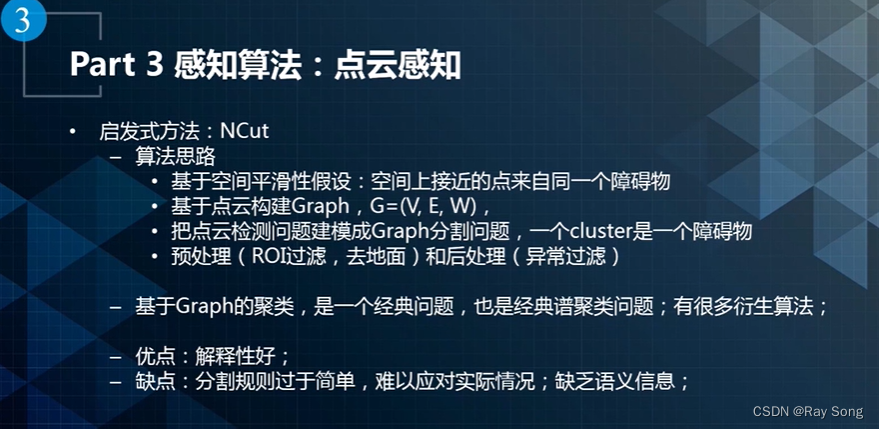
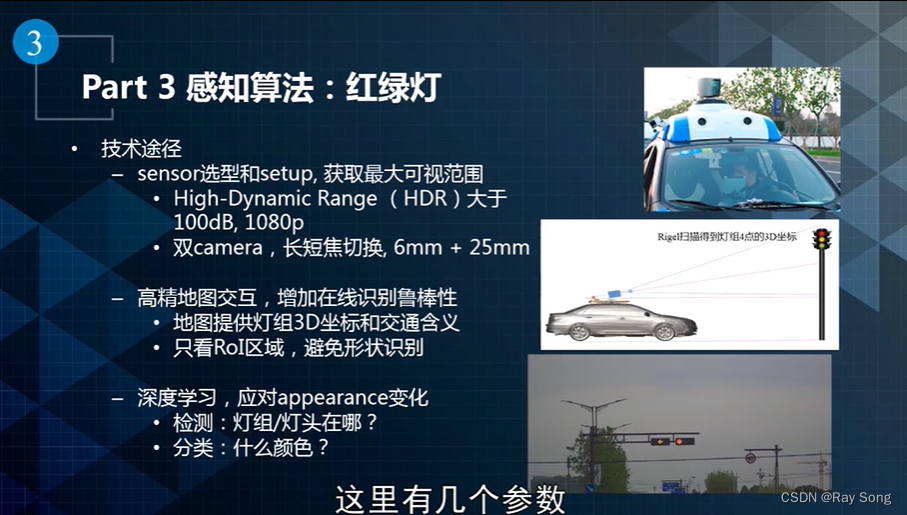
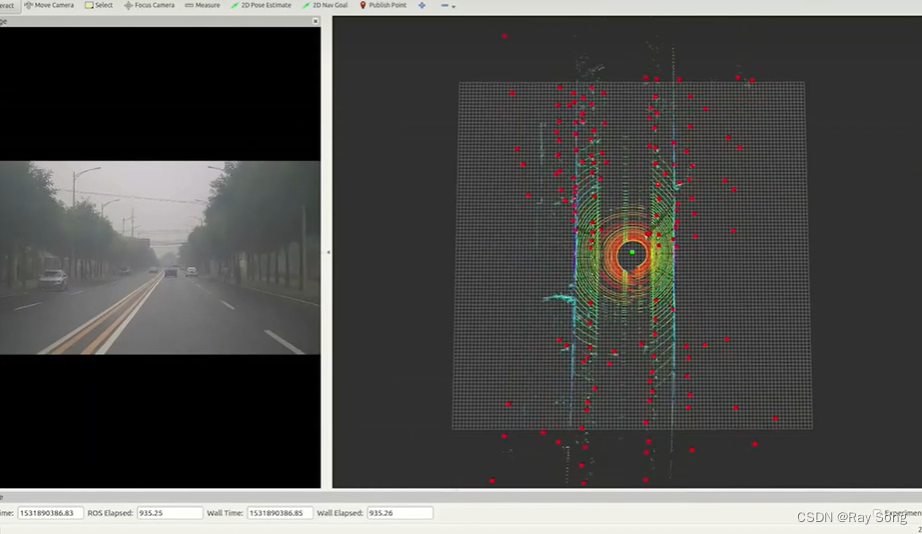
3. 感知算法
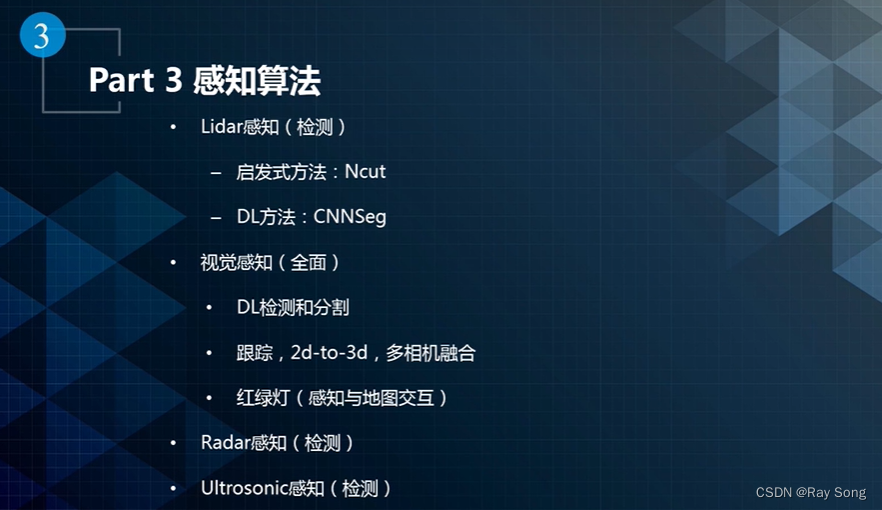

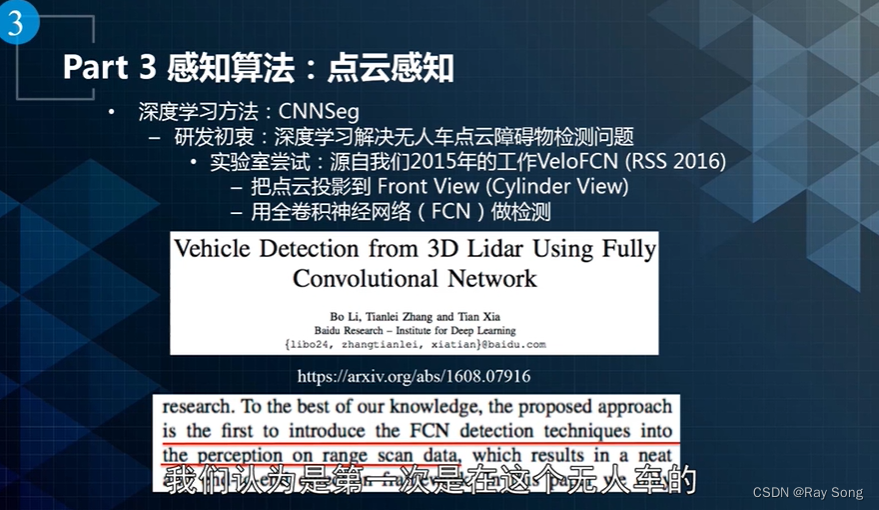
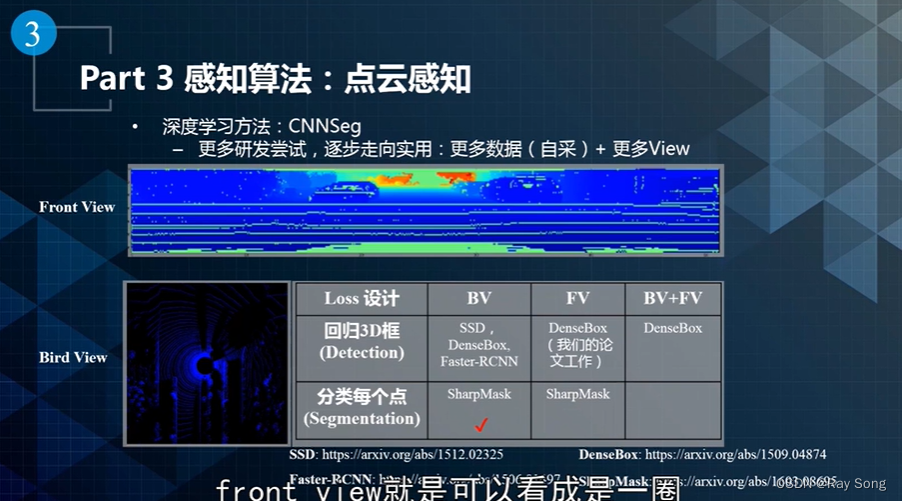
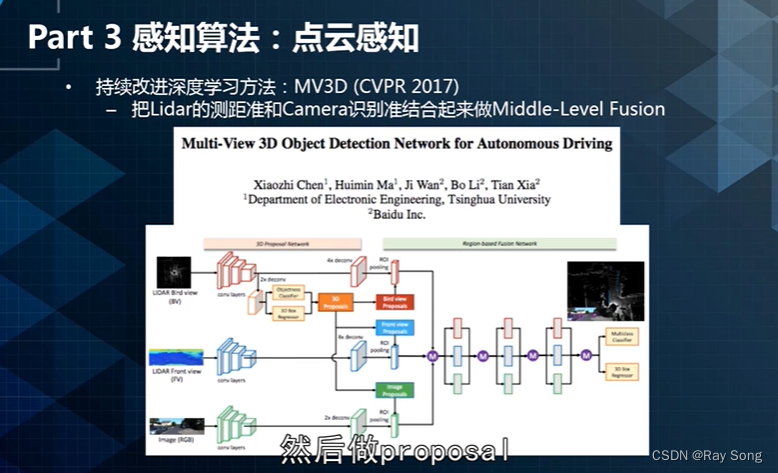
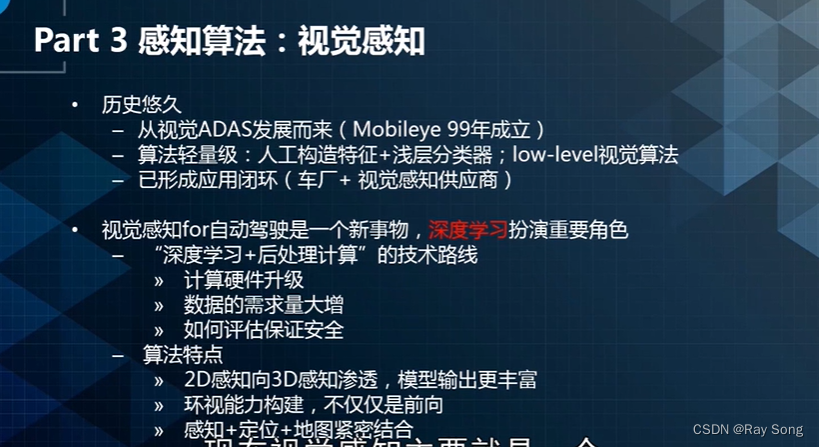
网络结构、训练技巧~
当前帧的检测要考虑到历史帧,不同时间要平滑。
让后处理尽量轻量化。
Det-2d 3d-Tracking-位置、速度
2D回3D


4. 机器学习
从自动驾驶安全性角度考虑,系统对感知的准确率、召回率和响应延时要求很高。例如在自动驾驶中的感知机器学习出现一些障碍物的漏检、误检会带来安全问题。漏检会带来碰撞,影响事故;误检会造成一些急刹,带来乘车体验的问题。同时要求低延时,如果一秒以后才获得感知结果,可能无人车已经碰上障碍物。
5. 感知未来