目录
环境:
飞腾GPIO介绍:
临时配置:
永久配置:
环境:
CPU:FT2000(64位,四核)
操作系统:linux-4.4.131-20200710
内核:kylin4.0.2
飞腾GPIO介绍:
各个CPU管脚对应的序号都有专门的算法。像RK,算法如下:

飞腾平台也有自己的算法,暂时还没拿到整个的算法,目前只咨询到部分关于GPIO的算法。
如下,这是咨询供应商的给出的对应关系,实际情况需要验证下:

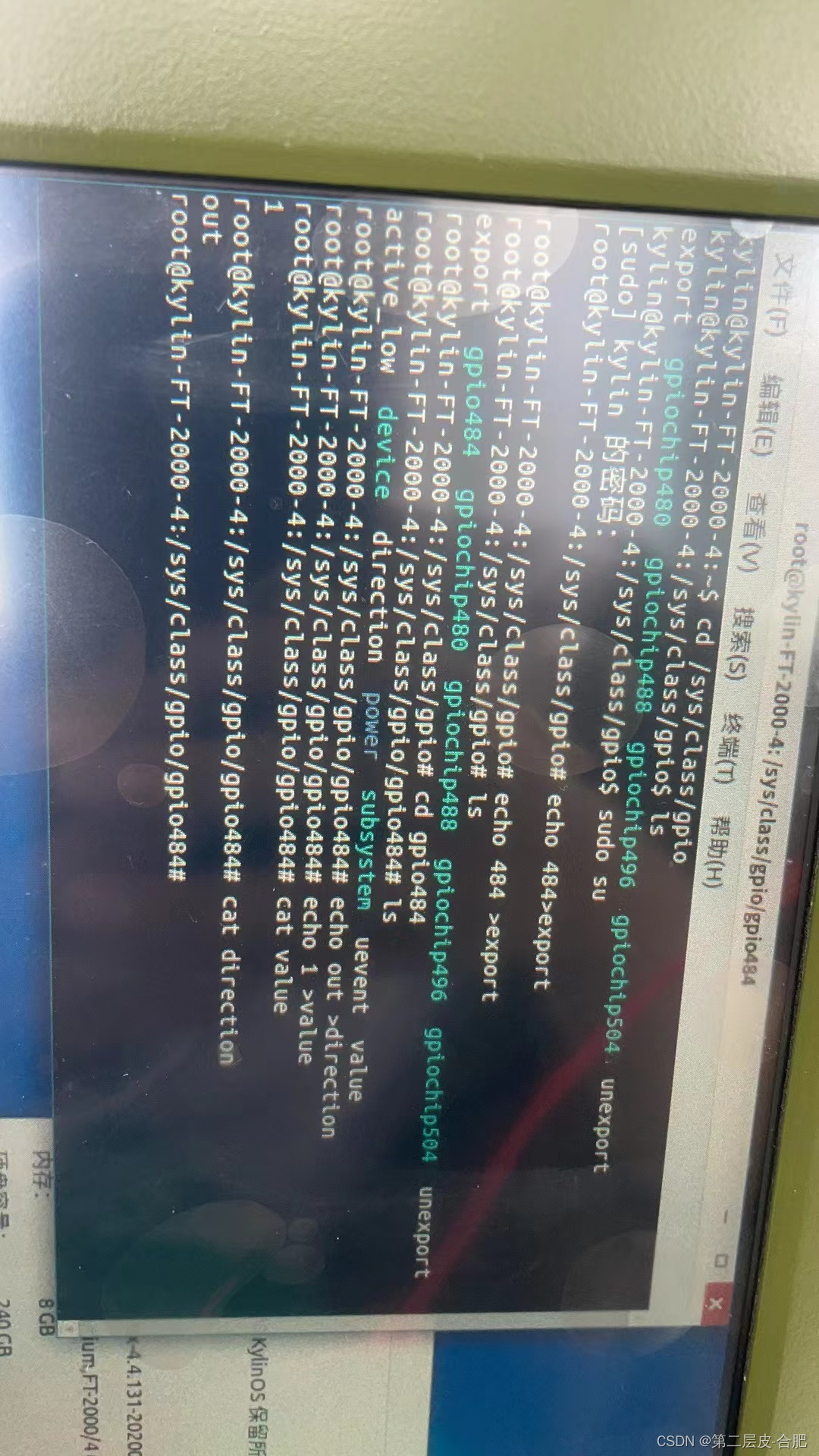
临时配置:
这里一会我们将举实际的例子,对飞腾的GPIO进行控制
cd /sys/class/gpio (这个目录时专门管理fei'teng)
先进入GPIO配置界面,输入LS查看端口。通过算法得出GPIO的端口名称。
将端口名称写入export。
echo 484 >export。
这里通常情况下,会提示权限不够,需要输入sudo命令,进行权限提升,然后在进行相应操作。
输入ls查看是否写入成功,
cd gpio484
进入gpio
配置输入输出方向:
echo out >direction
echo 1>value
y以上操作就是配置GPIO484输出1电平。
下面是实际操作配图
实际用万用表测量gpio的配置有效。
永久配置:
进入rc.cal把上面临时案例中的代码,配置到文件里面去。(rc.cal文件通常用来配置一些静态指令,通常由网口IP,静态管脚控制等等)
配置语句于命令行一致。
总结
本文主要对飞腾 麒麟系统的GPIO驱动配置做了总结与分享,希望能帮助到需要的童鞋