ROS action客户端和服务端通信
@gcusms
ROS 一般都是用 service 和 topic 进行数据之间的交互传输,因为这种通信方式无法满数据实时反馈的要求,所以采用 action 动作消息反馈通信机制(实时反馈的任务进度,并且可以随时终止运行)可以更加有效的控制数据流的输入输出和机器人运动控制,并且在导航中消息传输有更加灵活的数据传输

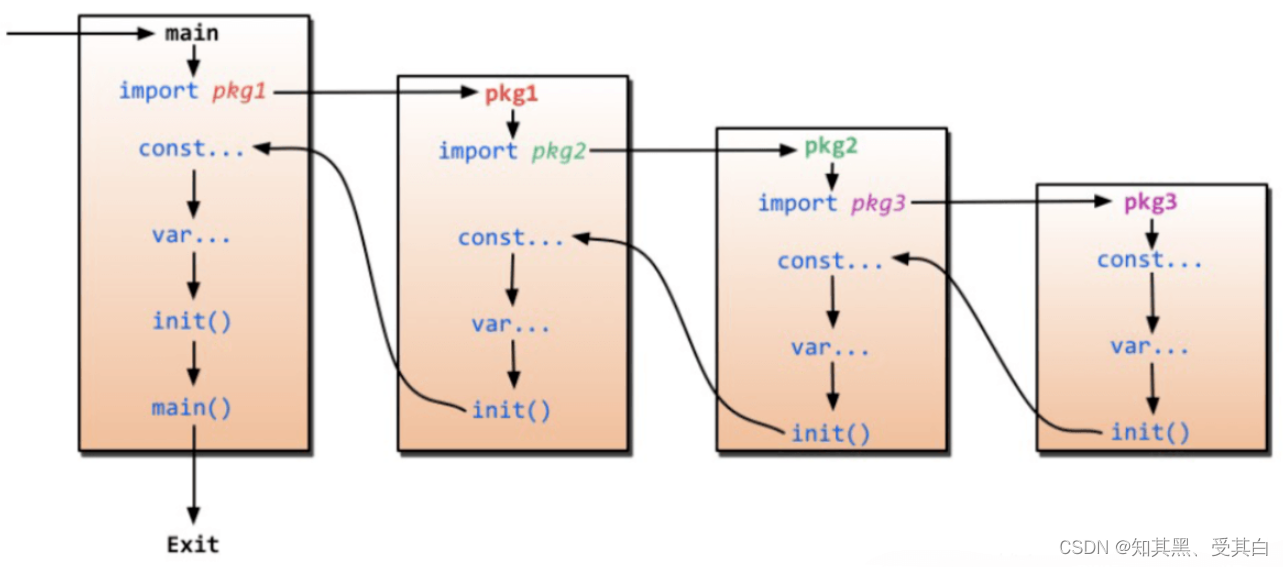
工作模式图
工作模式入如下面的图所示 (client 和 server)
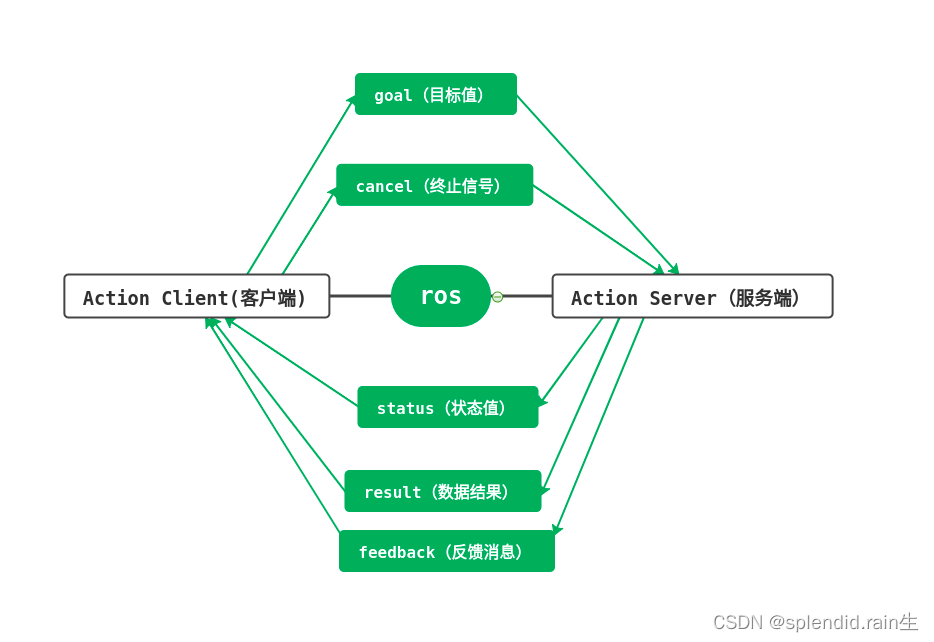
client 和 server 之间通过 actionlib 定义的 “action protocol” 进行通讯。这种通讯协议是基于 ROS 的消息机制实现的,提供了 client 和 server 的接口
- goal:任务目标
- cancel:请求取消任务
- status:通知 client (客户端)当前的状态
- feedback:周期反馈任务运行的监控数据
- result:向 client(客户端) 发送任务的执行结果,最终任务完成的结果只会发送一次
数据文件定义
action 通信机制的消息格式是以 .action 文件名为后缀的格式定义的,例如 XXX.action
# 定义需要发送到目标值
uint32 id
---
# 结果值
uint32 total_date
---
# feedback 过程进度反馈值
float32 percent_complete

我的 action 文件名字定义为 test.action
CMakeLists.txt 配置文件的修改
完成 action 文件的定义之后就可以开始创建功能包
使用命令:✋:
catkin_create_pkg action_test roscpp rospy actionlib actionlib_msgs std_msgs
创建一个名为 action_test 的功能包,然后修改 CMakelists.txt 里面的配置
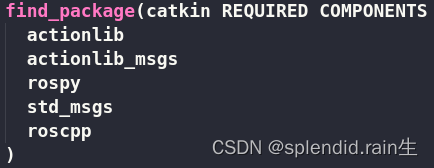
find_package(catkin REQUIRED COMPONENTS
actionlib
actionlib_msgs
rospy
std_msgs
roscpp
)
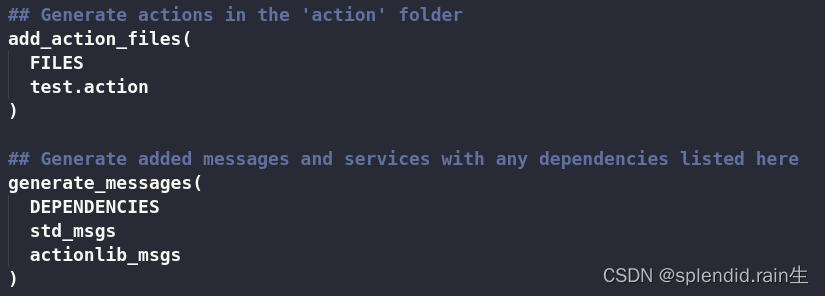
## Generate actions in the 'action' folder
add_action_files(
FILES
test.action
)
## Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
std_msgs
actionlib_msgs
)
其他的相关配置如同创建话题发布消息即可
客户端 Client
代码编写,编写一个循环反馈的程序
创建客户端的步骤如下:
- 包含相关的头文件
- 初始化 ROS 节点
- 创建 NodeHandle
- 创建 action 的关联对象
- 编写处理的请求,也是代码数据处理的主要部分
- 循环
对于客户端,主要是编写是三个函数:
- 任务开始的回调函数
- 任务进度过程中接受到的进度反馈函数
主要的(需要注意)代码块
- Client 客户端声明
typedef actionlib::SimpleActionClient<action_test::testAction> Client;
- 任务开始调用的函数
// 任务开始后调用的函数
void activeCb()
{
ROS_INFO("开始任务");
}
- 进度反馈函数
注意 feddback 申明指针的定义 testFeedbackConstPtr =【action文件名字】& FeedbackConstPtr
// 收到 feedback 后调用的回调函数
void feedbackCb(const action_test::testFeedbackConstPtr& feedback)
{
ROS_INFO(" 完成的进度 : %f ", feedback->percent_complete);
}
具体的代码如下
#include <actionlib/client/simple_action_client.h>
#include "action_test/testAction.h"
typedef actionlib::SimpleActionClient<action_test::testAction> Client;
// 当action完成后会调用次回调函数一次
void doneCb(const actionlib::SimpleClientGoalState& state,
const action_test::testResultConstPtr& result)
{
ROS_INFO("任务完成");
ros::shutdown();
}
// 任务开始后调用的函数
void activeCb()
{
ROS_INFO("开始任务");
}
// 收到 feedback 后调用的回调函数
void feedbackCb(const action_test::testFeedbackConstPtr& feedback)
{
ROS_INFO(" 完成的进度 : %f ", feedback->percent_complete);
}
int main(int argc, char** argv)
{
setlocale(LC_ALL,"");
ros::init(argc, argv, "do_dishes_client");
// 定义一个客户端
Client client("do_dishes", true);
// 等待服务器端
ROS_INFO("等待服务器开始运行");
client.waitForServer();
ROS_INFO("服务器开始运行");
// 创建一个action的goal
action_test::testGoal goal;
goal.send_id = 1;
// 发送action的goal给服务器端,并且设置回调函数
client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb);
ros::spin();
return 0;
}
服务端 Server
创建服务端的步骤如下:
- 包含相关的头文件
- 初始化 ROS 节点
- 创建 NodeHandle
- 创建 action 的客户端对象
- 编写处理的请求,也是代码数据处理的主要部分
- 循环
对于客户端,主要是编写是三个函数:
- 任务开始的回调函数
- 任务进度过程中的进度反馈函数
- 任务完成结束反馈函数
主要的(需要注意)代码块
- 接收到 goal 后调用的函数
void MissionOne(const action_test::testGoalConstPtr& goal, Server* as)
- 消息反馈对象声明和 publishFeedback 函数
action_test::testFeedback feedback;
as->publishFeedback(feedback);
- 任务结束反馈的函数
as->setSucceeded();
具体的代码如下
#include <ros/ros.h>
#include <actionlib/server/simple_action_server.h>
#include "action_test/testAction.h"
typedef actionlib::SimpleActionServer<action_test::testAction> Server;
// 收到action的 goal 后调用的回调函数
void MissionOne(const action_test::testGoalConstPtr& goal, Server* as)
{
ros::Rate r(1);
action_test::testFeedback feedback;
ROS_INFO("任务 %d 正在工作中.", goal->send_id);
// 假设洗盘子的进度,并且按照1hz的频率发布进度feedback
for(int i=1; i<=10; i++)
{
feedback.percent_complete = i * 10;
as->publishFeedback(feedback);
r.sleep();
}
// 当action完成后,向客户端返回结果
ROS_INFO("任务 %d 完成.", goal->send_id);
as->setSucceeded();
}
int main(int argc, char** argv)
{
setlocale(LC_ALL,"");
ros::init(argc, argv, "do_dishes_server");
ros::NodeHandle n;
// 定义一个服务器
Server server(n, "do_dishes", boost::bind(&MissionOne, _1, &server), false);
// 服务器开始运行
server.start();
ros::spin();
return 0;
}
上述代码块中的客户端和服务端编写的过程中,函数传递的对象一般使用引用活着指针来对数据进行操作,获取到 action 文件里面的数据需要以 GalConsPtr 来声明常数指针进行后序的操作
测试
打开一个新的终端,如果还没有加载到环境变量当中,重新添加临时的环境声明,不过下次需要重新声明加载一次
source devel/setup.bash
- 启动 ros 中的 master 节点
roscore
2.启动客户端
rosrun action_test action02_client
3.启动服务端
rosrun action_test action01_server

至此,完成了 ROS 中的 action 简易的通信机制,这种通信机制尝尝会应用于很多的场景,例如路径规划,机器人关节控制
🌸🌸🌸完结撒花🌸🌸🌸
🌈🌈Redamancy🌈🌈


![[附源码]计算机毕业设计现代诗歌交流平台Springboot程序](https://img-blog.csdnimg.cn/c5a29dcc2d3c42659883d1690ac1d28f.png)