- 博主简介:一个爱打游戏的计算机专业学生
- 博主主页: @夏驰和徐策
- 所属专栏:算法设计与分析
1.什么是多边形的三角剖分?
多边形三角剖分是指将多边形分割成互不相交的三角形的弦的集合T。
我的理解:
多边形三角剖分是将给定的多边形分割成一组三角形的过程。在计算机图形学和计算几何中,多边形三角剖分常被用于各种应用,如三角网格生成、几何形状分析、计算几何算法等。
多边形三角剖分的目标是将一个复杂的多边形分解为一组简单的三角形,以便于进行后续的计算和处理。在进行三角剖分时,需要满足以下几个条件:
1. 每个三角形的顶点都位于多边形的边界上或内部。
2. 任意两个三角形之间不得有交叉或重叠的边或顶点。
3. 三角形的个数应该尽可能少,以保持剖分的简洁性和效率。
多边形三角剖分算法可以分为多种类型,包括贪心算法、分治算法、动态规划算法等。每种算法都有其特定的优点和适用场景。
在实际应用中,多边形三角剖分被广泛用于计算机图形学中的渲染、碰撞检测和模型建模等方面。通过将复杂的多边形分解为简单的三角形,可以方便地进行光照计算、表面绘制和模型变形等操作。
总而言之,多边形三角剖分是将给定的多边形分割成一组简单的三角形的过程。它在计算机图形学和计算几何中具有广泛的应用,是实现各种图形算法和图形处理任务的基础。
2.什么是凸多边形最优三角剖分?
我的理解:
凸多边形最优三角剖分是指在给定的凸多边形中,找到一种三角剖分方式,使得剖分后的三角形总面积最小或满足某种特定的优化目标。
凸多边形是指所有内角都小于180度的多边形,它具有边界上所有顶点向内凸起的特点。凸多边形的最优三角剖分可以通过动态规划的方法来解决。
动态规划方法的基本思想是将原问题划分为多个子问题,并通过求解子问题的最优解来得到原问题的最优解。对于凸多边形最优三角剖分问题,可以定义一个二维数组来存储每个子多边形的最优解,然后利用递推关系式进行计算。
具体的凸多边形最优三角剖分算法如下:
1. 创建一个二维数组dp[n][n],其中n为凸多边形的顶点数,dp[i][j]表示从顶点i到顶点j的子多边形的最优三角剖分的总面积。
2. 初始化dp数组,将所有dp[i][j]的初始值设为0。
3. 从长度为3开始,逐渐增加子多边形的长度,计算所有可能的子多边形的最优解。具体步骤如下:
- 遍历所有可能的子多边形起点i,范围从0到n-3。
- 对于每个起点i,计算子多边形的终点j,范围从i+2到n-1。
- 遍历所有可能的切割点k,范围从i+1到j-1。
- 计算当前子多边形的最优解dp[i][j],通过将子多边形划分为三角形(i, k, j)和子多边形(i, k)、(k, j)两部分,并累加三个部分的面积。
4. 最终的最优解为dp[0][n-1],即整个凸多边形的最优三角剖分总面积。
凸多边形最优三角剖分的动态规划算法可以在多项式时间内求解,具有较高的效率和准确性。它在计算机图形学和几何计算中被广泛应用,用于生成高质量的三角网格、计算几何形状的凸壳等任务。
3.这里再三角剖分的结构及其相关问题为什么要等价?
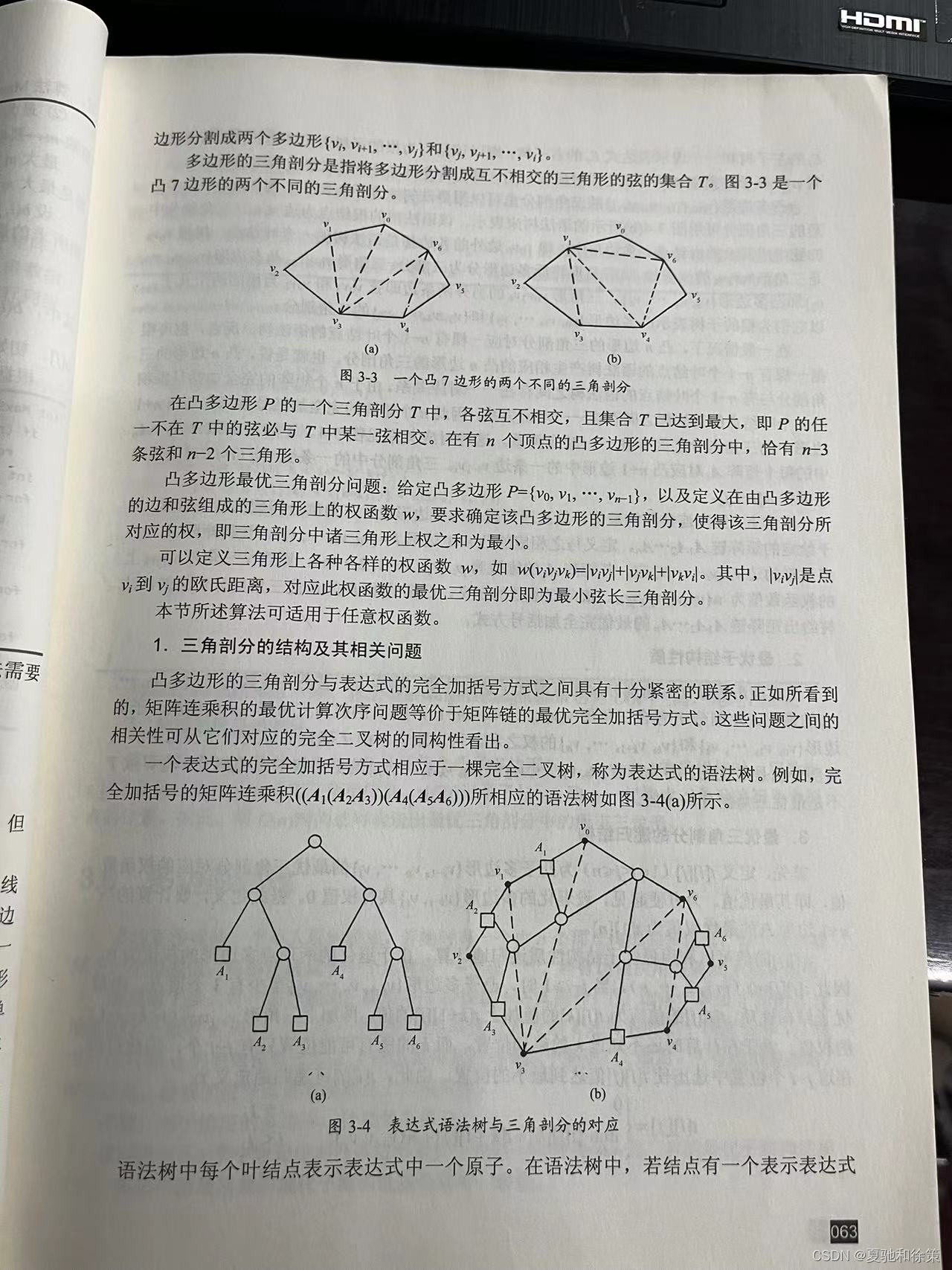
将凸多边形的三角剖分问题与表达式的完全加括号方式进行等价转换,以及与矩阵连乘积最优计算次序问题的联系,主要是为了利用动态规划算法解决这些问题。
通过将凸多边形的三角剖分问题转化为表达式的完全加括号方式,可以借用表达式求值的思路来解决凸多边形的最优三角剖分问题。这样做的好处是,表达式求值问题已经被广泛研究和理解,有成熟的算法和技巧可供借鉴。
另外,将凸多边形的最优三角剖分问题与矩阵连乘积最优计算次序问题进行等价转换,是因为它们具有相似的结构和求解方法。两者都可以表示为一组子问题的最优解,并通过递推关系式来计算整体的最优解。矩阵连乘积问题的最优解可以用于表示表达式的完全加括号方式,而凸多边形的最优三角剖分问题可以通过对应的完全二叉树来表示。
这种等价转换的好处是,可以利用已有的算法和技巧解决一个问题来解决另一个问题,从而减少了重复工作和研究。同时,通过等价转换,我们可以从不同的角度和领域来理解和解决这些问题,促进知识的交叉和融合。
总之,将凸多边形的三角剖分问题与表达式的完全加括号方式进行等价转换,以及与矩阵连乘积最优计算次序问题的联系,可以扩展问题的求解思路,借用已有的算法和技巧,从不同角度来解决和理解这些问题,推动相关领域的交叉和发展。
4.什么是完全二叉树的同构性
二叉树的知识你们可以看传送门:5.4 二叉树的性质和存储结构
完全二叉树的同构性指的是两个完全二叉树在结构上具有相似性或等价性的特点。当两个完全二叉树具有相同的节点个数,并且对应位置的节点具有相同的值,它们被认为是同构的。
具体来说,两个完全二叉树的同构性要求满足以下条件:
1. 两个二叉树具有相同的节点个数。
2. 对应位置的节点具有相同的值。
3. 对应位置的节点具有相同的子树结构,即左子节点和右子节点的同构性。
同构的两个完全二叉树在结构上是一一对应的,它们的节点可以按照相同的顺序进行编号,并且对应编号的节点具有相同的值。同构的二叉树可以看作是相同的形状,只是节点的值可能不同。
同构性在二叉树的比较、匹配和相似性判断中具有重要意义。通过判断两个二叉树是否同构,可以确定它们是否具有相似的结构和节点排列,进而进行相关的操作和分析。
5.如何证明最优子结构
要证明最优三角剖分问题具有最优子结构,可以使用反证法或数学归纳法。
假设最优三角剖分问题没有最优子结构,即存在一个最优解不包含最优子问题的解。这意味着我们可以找到一个更优的解,它在某个位置选择了非最优的子问题解。
假设在最优解中,存在两个相邻的三角形,它们可以通过删除它们之间的边并连接成一个更大的三角形,这个更大的三角形的剖分代价小于原来的解。
然而,这与最优解的假设相矛盾。如果我们可以找到一个更优的解,那么原始解就不是最优解,这与最优性假设相违背。
因此,可以得出结论:最优三角剖分问题具有最优子结构。也就是说,任何最优解的子问题也是最优解。
通过证明最优子结构,我们可以使用动态规划等算法来求解最优三角剖分问题。这意味着我们可以将问题分解为子问题,并通过求解子问题的最优解来构建整体的最优解。
6.最优三角剖分递归
要证明最优三角剖分具有递归结构,可以使用动态规划的思想。动态规划是一种将问题分解为子问题,并通过求解子问题的最优解来求解原始问题的方法。
最优三角剖分问题可以通过子问题的最优解来构建整体的最优解。假设我们有一个凸多边形,我们可以选择其中的一条边作为最后一个三角形的边,然后将多边形分成两个子多边形。这样,原始问题的最优解可以由子问题的最优解构成。
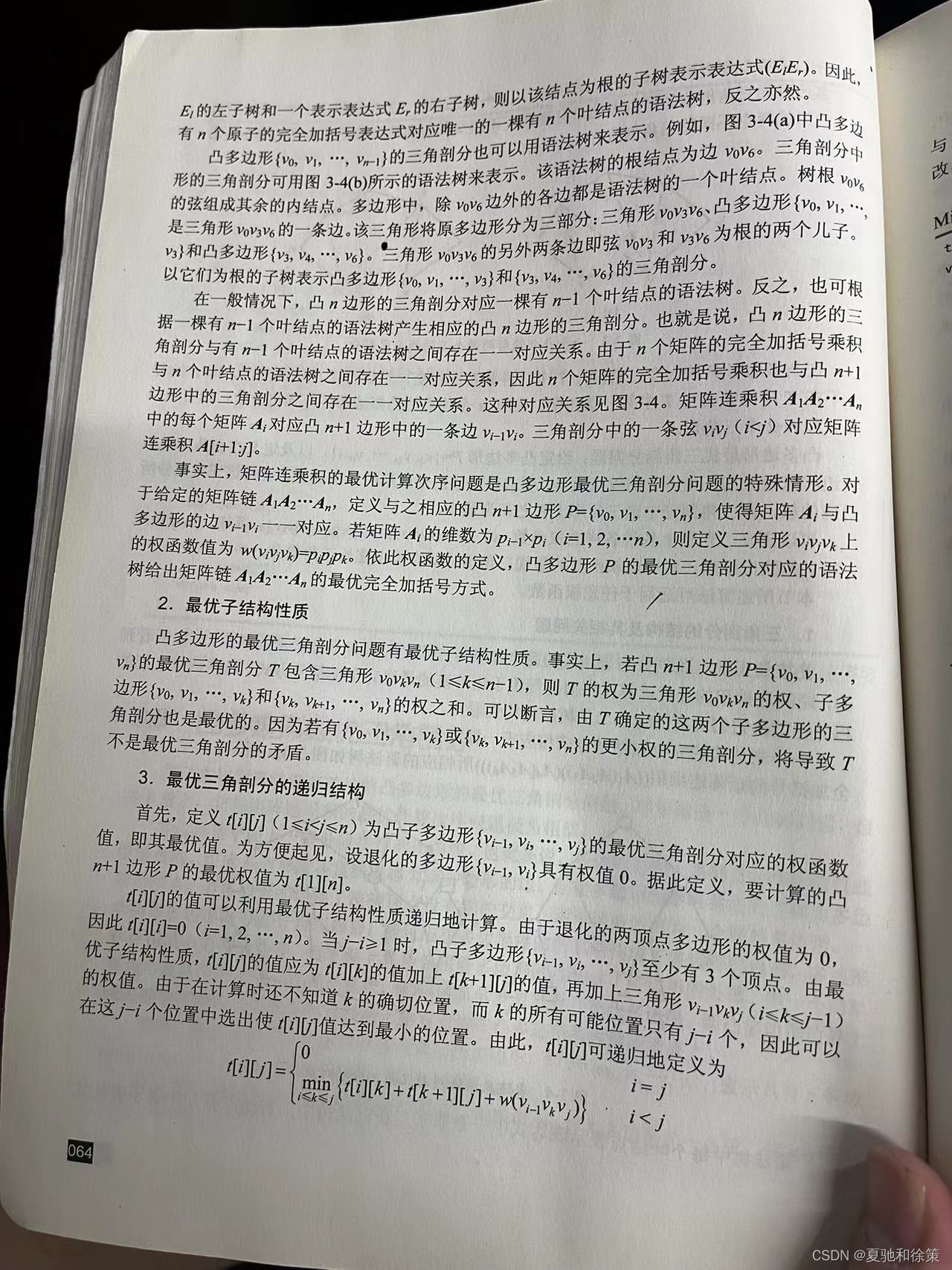
具体而言,可以定义一个二维数组dp,其中dp[i][j]表示从第i个顶点到第j个顶点之间的最优三角剖分的最小代价。初始时,将dp[i][i]设为0,表示单个顶点没有三角剖分的代价。
然后,我们可以使用一个循环来逐步计算dp数组。外层循环控制子多边形的长度,从2开始逐渐增加,直到整个多边形的长度。内层循环用于遍历子多边形的起始顶点,确定划分的位置。
在内层循环中,我们可以使用一个变量k来表示划分的位置,从i+1到j-1进行遍历。对于每个划分位置k,可以计算出将多边形划分为两个子多边形的代价,即dp[i][k] + dp[k][j] + cost(i, j, k),其中cost(i, j, k)表示从顶点i到顶点j经过顶点k形成的三角形的代价。
最终,当遍历完所有可能的划分位置时,dp[0][n-1]就是整个凸多边形的最优三角剖分的最小代价。
通过这种自底向上的动态规划的方法,可以递归地构建最优三角剖分的结构,并求解出最小代价。这证明了最优三角剖分问题具有递归结构,可以通过子问题的最优解来构建整体的最优解。
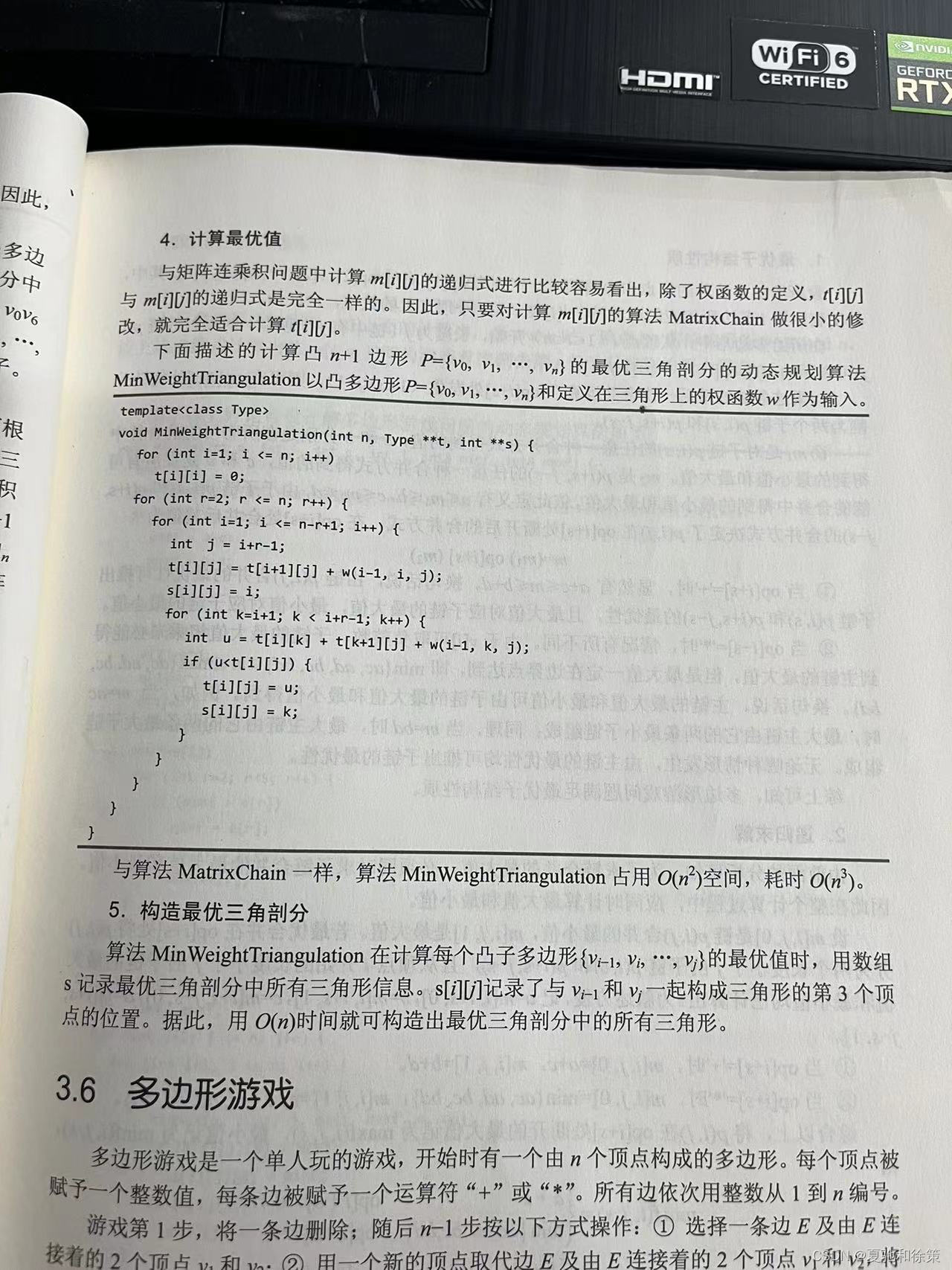
时间复杂度和空间复杂度
O(n^3),O(n^2)
总结:
凸多边形最优三角剖分的动态规划算法的重点、难点和易错点如下:
重点:
1. 子问题的定义:将大问题划分为小问题,定义子问题的状态和最优解。
2. 递推关系的建立:确定子问题之间的递推关系,即如何利用子问题的最优解来求解当前问题的最优解。
3. 最优子结构的证明:证明通过选择最小代价的切割边可以得到整体的最优解。
难点:
1. 状态的定义:确定问题的状态如何表示,以及如何定义子问题的状态。
2. 递推关系的推导:根据问题的性质,推导出子问题之间的递推关系,使得问题的最优解可以通过子问题的最优解来求解。
3. 递推顺序的确定:确定问题的求解顺序,保证在求解当前问题时所需的子问题已经被求解。
易错点:
1. 边界情况的处理:在实现动态规划算法时,要考虑边界情况的处理,例如多边形只有三个顶点的情况。
2. 数组索引的处理:注意数组索引的起始位置和结束位置的选择,确保正确地访问和更新数组元素。
3. 代价计算的正确性:在选择切割边时,要确保代价计算的准确性,包括计算切割边上的三角形的代价和计算子问题的代价。
在实现凸多边形最优三角剖分的动态规划算法时,需要关注上述重点、难点和易错点,确保算法的正确性和有效性。同时,通过调试和测试,可以发现和解决潜在的问题,提高算法的质量和效率。