点击链接获取Keil源码与Project Backups仿真图:
https://download.csdn.net/download/qq_64505944/87855439?spm=1001.2014.3001.5503

源码获取
一、实验目的
掌握单片机的综合应用设计。加强对单片机和汇编语言的认识,充分掌握和理解设计各部分的工作原理、设计过程、模块化编程等多项知识。学会用单片机模拟实现具体应用,使个人设计能够真正使用。提高利用已学知识分析和解决问题的能力,把理论知识与实践相结合,充分发挥个人能力,提高实践动手能力并在实践中锻炼。
二、实验仪器、材料
PC机、 keil 软件、proteus软件
三、实验内容及要求
实验内容:利用proteus画出仿真图,在keil中编写好程序并调试,然后下载到单片机内实现仿真
实验要求:十字路口的交通灯控制系统,四组灯(红黄绿)对应十字路口的四个方向,用两位的数码管显示剩余的时间。
四、实验原理
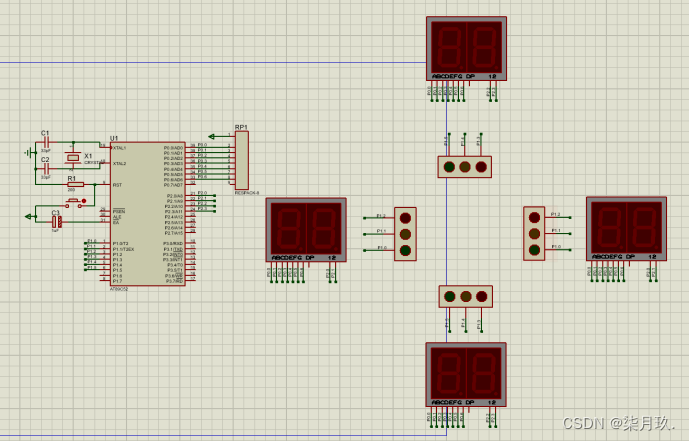
用51单片机的P1.0-P1.5端口来控制两个方向的红黄绿三种颜色的灯,在高电平时对应的灯亮,P0.0-P0.6端口用来显示数码管倒计时,每秒跳变一次。本实验采用共阳极的的数码管,在低电平下相应的数码管段亮。P2.0和P2.1控制东西方向两个数码管的位选,P2.2和P2.3控制南北方向两个数码管的位选,高电平则为选中。本实验采用51单片机定时中断控制LED的跳转和数码管的倒计时,时长为50ms。
五、实验过程及原始记录(包括原理图或程序代码)
实验方案:
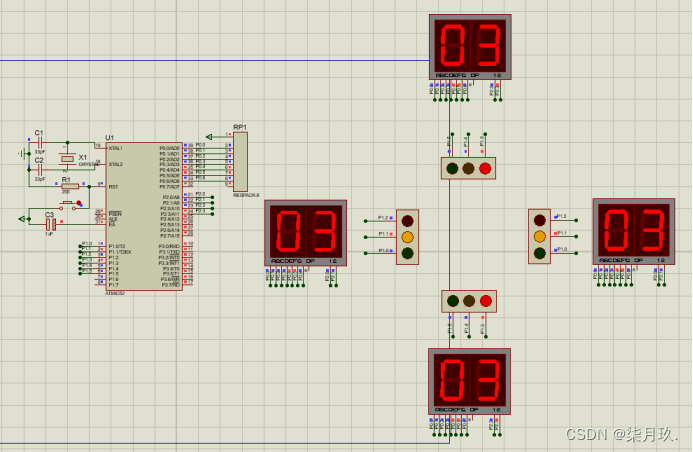
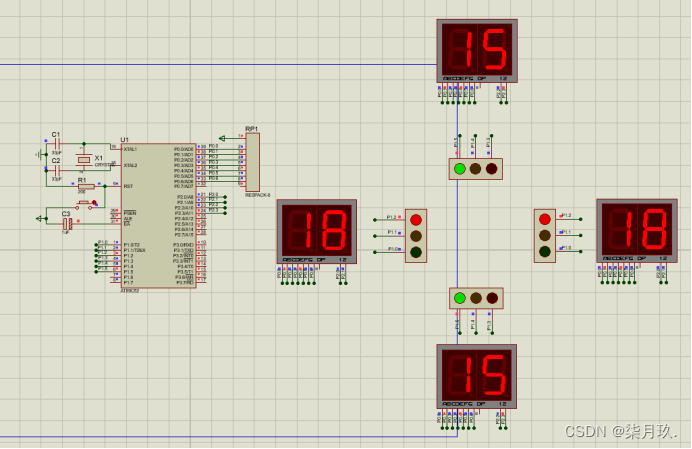
初始时南北方向为红灯,时间为18s,东西方向为绿灯,时间为15s,绿灯倒计时完毕后会有3s的黄灯时间,黄灯结束后,南北方向变为绿灯,东西方向变为红灯。
原理图:
代码:
#include "reg51.h"
sbit hg=P1^0;
sbit hy=P1^1;
sbit hr=P1^2;
sbit sr=P1^3;
sbit sy=P1^4;
sbit sg=P1^5;
sbit h1=P2^0;
sbit h2=P2^1;
sbit s1=P2^2;
sbit s2=P2^3;
typedef unsigned int u16; //对数据类型进行声明定义
int count=0;
int time1=15,time2=18;
int t1=15,t2=18;
int number=1;
int num[10]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90};//共阴
void delay(u16 n)
{
while(n--);
}
void show(int n,int m)//数码管显示函数
{
int a,b,c,d;
a=n/10;
b=n%10;
c=m/10;
d=m%10;
P0=0xff;
h1=1;
h2=s1=s2=0;
P0=num[a];
delay(50);
P0=0xff;
h1=s1=s2=0;
h2=1;
P0=num[b];
delay(50);
s1=1;
s2=h1=h2=0;
P0=num[c];
delay(50);
s1=h1=h2=0;
s2=1;
P0=num[d];
delay(50);
}
void main()
{
P1=0x00;
hg=1;sr=1;
show(time1,time2);
delay(100);
TMOD=0x01;//设置定时器0工作方式1
TL0=0x3C;//定时50ms
TH0=0xB0;
ET0=1;//定时器0中断
EA=1;//开总中断
TR0=1;//开始计时
while(1)
{
show(time1,time2);
}
}
void timer() interrupt 1 //定时器中断
{
TH0=0x3C;
TL0=0xB0;
count=count+1;
if(count==20)
{
count=0;
time1--;
time2--;
show(time1,time2);
if(time1==0&&time2!=0)
{
P1=0x00;hy=1;sr=1;
time1=3;
show(time1,time2);
}
if(time1!=0&&time2==0)
{
P1=0x00;hr=1;sy=1;
time2=3;
show(time1,time2);
}
if(time1==0&&time2==0)
{
if(number%2==1)
{
P1=0x00;hr=1;sg=1;
time1=t2;time2=t1;
number=0;
}
else
{
P1=0x00;hg=1;sr=1;
time1=t1;time2=t2;
number=1;
}
}
}
}
六、实验结果及分析(程序运行结果或硬件仿真分析)
开始运行时南北方向为红灯,时间为18s,东西方向为绿灯,时间为15s
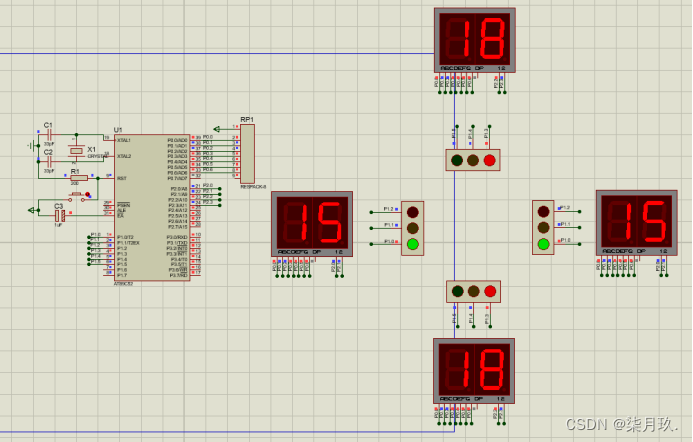
东西方向绿灯倒计时完毕后会有3s的黄灯时间
黄灯结束后,南北方向变为绿灯,东西方向变为红灯
南北方向绿灯倒计时完毕后会有3s的黄灯时间

黄灯结束后,南北方向变为红灯,东西方向变为绿灯,以此重复循环
七、实验体会
在这次综合性实验过程中我加深了从编程、软件使用到调试这一过程,逻辑思维和动手能力都得到了很大的提高,对于平时所学的书本知识也有了进一步的巩固与运用。本实验要解决的主要问题就是程序的设计和仿真,虽然初期在设计和布局、编程时有了大致的想法,但是在实现的过程中也还是遇到了一些问题,但是我通过查阅资料或者与同学交流主动去解决了这些问题,我认为在这个过程中是收获最大的。虽然只是完成了最基本的功能,但是整个仿真和代码的编写都是由自己亲自完成,对于以前理解不到位的知识也更加清楚,后面也会对本次设计不断完善,争取做到更好。通过这次系统实验,我对以前学过的知识进行了巩固,加深了理解,提高了应用的能力,而且提高了我的发现、分析、解决问题的能力,同时提高了对专业的认识及兴趣,对于以后的学习有很大的帮助
八、实验改进(即区别于实验指导书的内容)
我的设计方案只是完成了最基本的倒计时与灯光变化功能,没有增加额外的功能,如紧急情况的处理,夜间车流量少时的方案等等,在实用性方面不够完善,应更多地贴合实际,考虑实际情况。