PCL 改进点云双边滤波算法
news2026/2/14 20:36:22


 </
</
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/591651.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

PHPMySQL基础(五):模拟登录后跳转+会话存储功能实现
PHP&MySQL基础(一):创建数据库并通过PHP进行连接_长风沛雨的博客-CSDN博客
PHP&MySQL基础(二):通过PHP对MySQL进行增、删、改、查_长风沛雨的博客-CSDN博客
PHP&MySQL基础(三):处理查询SQL返…

一图看懂 tqdm 模块:一个可在循环和命令行中使用的快速、可扩展的进度条,资料整理+笔记(大全)
本文由 大侠(AhcaoZhu)原创,转载请声明。 链接: https://blog.csdn.net/Ahcao2008 一图看懂 tqdm 模块:一个可在循环和命令行中使用的快速、可扩展的进度条,资料整理笔记(大全) 🧊摘要🧊模块图&…

软考高级架构师笔记-5计算机网络
目录 1. 前言 & 考情分析2. 网络功能和分类2.1 通信技术3. OSI七层模型及协议3. 1 局域网和广域网协议3. 2 协议3. 3 交换技术、路由、传输介质4 IP地址5 网络存储技术6 其它考点8. 结语1. 前言 & 考情分析
前文回顾: 软考高级架构师笔记-1计算机硬件软考高级架构师笔…

chatgpt赋能python:Python中未定义变量的默认值
Python中未定义变量的默认值
在Python编程中,有时候我们会使用未经定义的变量。如果这些变量没有被定义,那么它们将没有任何值。在这篇文章中,我们将讨论Python中未定义变量默认值的问题,并深入研究为什么这些默认值如此重要。
…

华为OD机试真题B卷 Java 实现【寻找关键钥匙】,附详细解题思路
一、题目描述
小强正在参加《密室逃生》游戏,当前关卡要求找到符合给定 密码K(升序的不重复小写字母组成)的箱子,并给出箱子编号,箱子编号为1~N。
每个箱子中都有一个字符串s,字符串由大写字母࿰…

改进YOLOv5,利用HRNet高分辨率特征金字塔的全新物体检测突破
目录 一、介绍1、物体检测的背景与重要性2、HRNet和YOLOv5的概述(1)HRNet的概述(2)YOLOv5的概述 二、HRNet的架构1、HRNet的基本单元2、HRNet的高分辨率特征金字塔3、HRNet的体系结构4、HRNet的特点5、HRNet的局限性 三、YOLOv5的…
chatgpt赋能python:Python中转化为列表的详细介绍
Python中转化为列表的详细介绍
Python是一门高级编程语言,它使用起来简单易学,被广泛应用于大数据处理、科学计算、机器学习等领域。在Python编程中,列表是一种非常重要的数据结构,它允许我们存储和操作一组数据,并且…
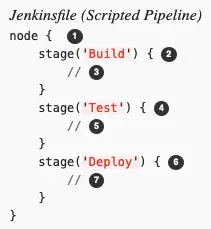
jenkins —— pipeline基础语法与示例
一、Jenkins介绍 二、Jenkins Pipeline介绍
Jenkins Pipeline总体介绍 1.Pipeline 是Jenkins 2.X核心特性,帮助Jenkins实现从CI到CD与DevOps的转变 2.Pipeline 简而言之,就是一套运行于Jenkins上的工作流框架,将原本独立 运行于单个或者多个…
GPT-4 的 6 个最佳使用场景
https://www.howtogeek.com/884077/best-uses-for-chatgpt-4/ 作者:SYDNEY BUTLER
无论是在 ChatGPT 中还是通过 API,对 OpenAI 的 GPT-4 模型的访问比 GPT-3.5 限制更多。这意味着你需要慎重考虑在何种情况下使用 GPT-4,并选择性地将最适合…
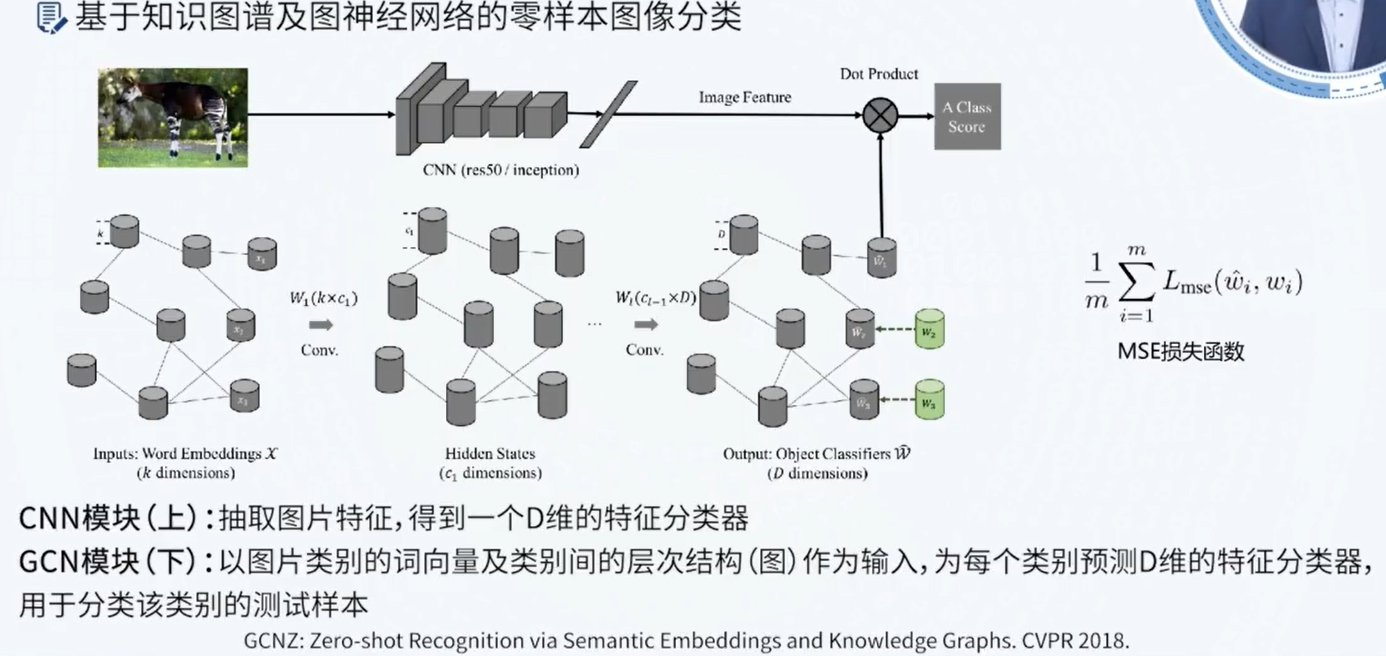
浙大知识图谱基础:学习笔记
0 基础知识 知识图谱中,知识的结构化表示主要有符号表示和向量表示两类方法。符号表示包括:一阶谓词逻辑,语义网络,描述逻辑和框架系统等。当前主要采用基于图的符号化知识表示,最常用的是有向标记图。 有向标记图分为…

SpringBoot统一功能处理(统一处理用户登陆权限验证、统一异常处理以及统一数据返回格式)
目录
1. SpringBoot统一功能处理简介
2. 统一处理用户登陆验证
2.1 原生SpringAOP实现统一登陆验证的问题
2.2 Spring拦截器实现用户统一登陆验证
2.3 扩展: 统一访问前缀添加
3. 统一异常处理
4. 统一数据返回格式
4.1 统一数据返回格式的必要性
4.2 实现统一数据返…
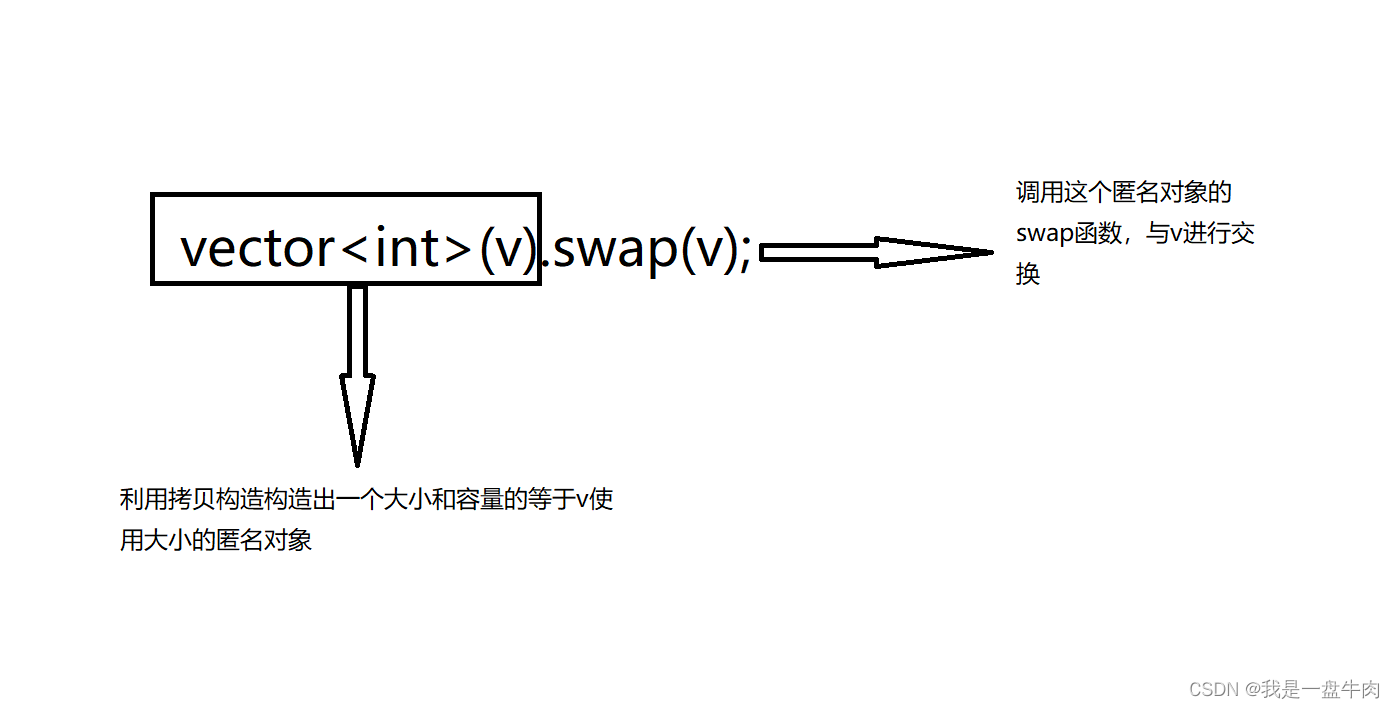
C++ vector类成员函数介绍
目录 🤔vector模板介绍:
🤔特点:
🤔vector的成员函数:
🔍vector构造函数: 🔍vector赋值函数 🔍vector容器的判断函数 resize函数的重点内容:
…
chatgpt赋能python:Python中的并:优化代码执行效率的利器
Python中的并:优化代码执行效率的利器
Python作为一种优秀的编程语言,被广泛使用于各种各样的项目中。然而,随着程序的不断扩张,代码的复杂度日益增加,执行效率也愈加遇到了严峻的挑战。在这种情况下,Pyth…
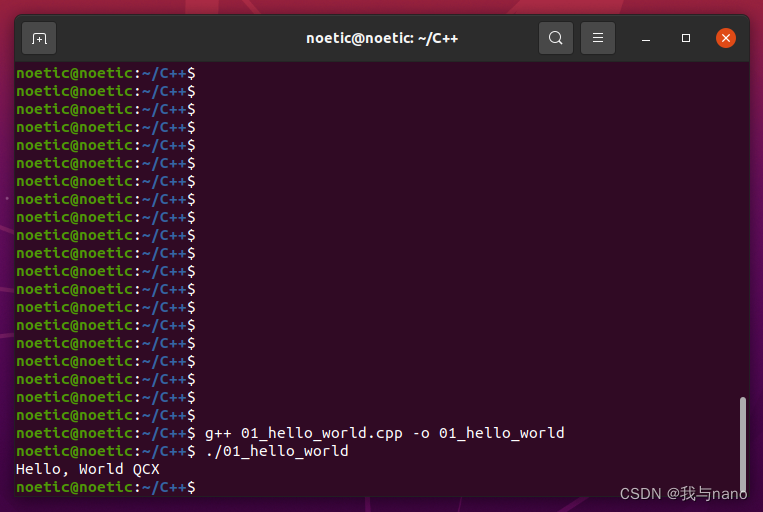
Linux系统下imx6ull QT编程—— Ubuntu 下编写程序(一)
Linux QT编程 文章目录 Linux QT编程前言一、C简介二、C环境设置1.安装编译 C 语言和 C的环境。2.创建文件编写代码3.编译运行代码 总结 前言
绍在 Ubuntu 在终端窗口下使用 vi/vim 编辑一个 C源文件。通过编写最简单的示例“Hello,World QCX”。
一、C简介
C (c…
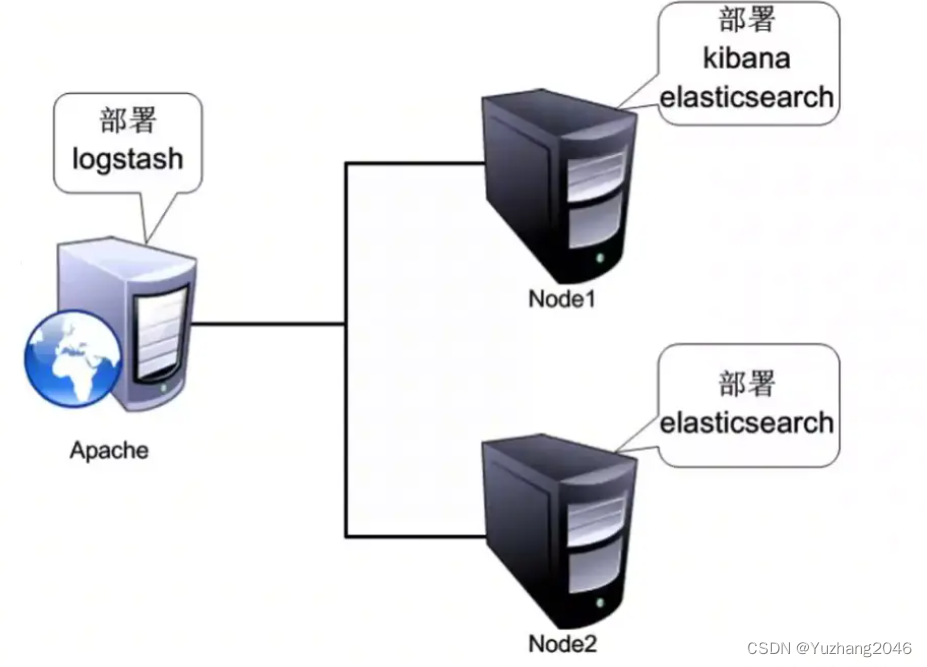
【分布式应用】ELK企业级日志分析系统
一、ELK 简介
ELK平台是一套完整的日志集中处理解决方案,将 ElasticSearch、Logstash 和 Kiabana 三个开源工具配合使用, 完成更强大的用户对日志的查询、排序、统计需求。 1.1 ELK各组件介绍
ElasticSearch:
是基于Lucene(一个…
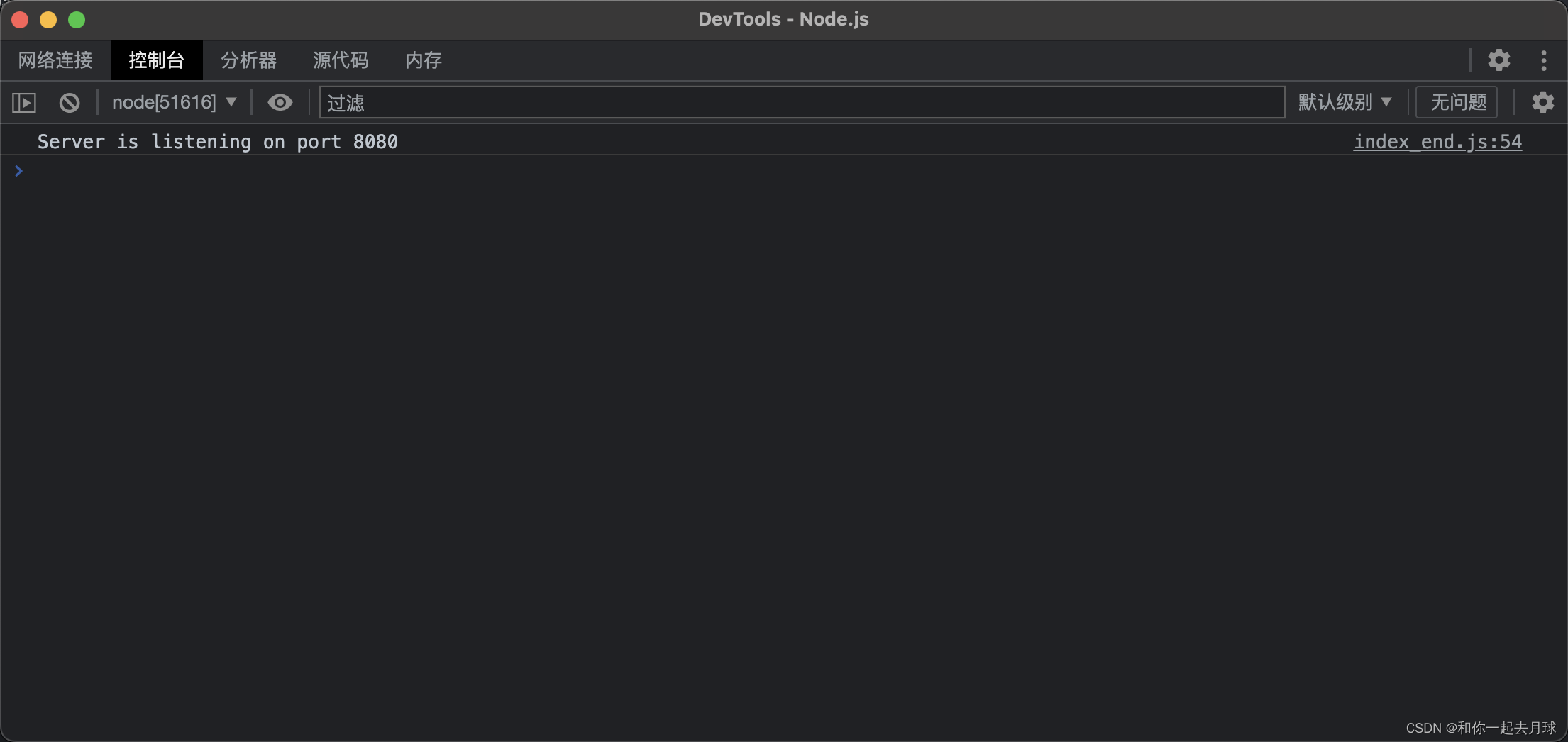
Node.js 中的代码调试
目录
1、启用 Inspector
2、安全隐患
3、Inspector 客户端
4、启用远程调试的情形
5、以前的Debugger 1、启用 Inspector
当使用 --inspect 开关时,Node.js 进程开始侦听调试客户端,默认情况下侦听 127.0.0.1:9229 的域名和端口号;每个…

华为OD机试真题B卷 Java 实现【Linux 发行版的数量】,附详细解题思路
一、题目描述
Linux 操作系统有多个发行版,distrowatch.com 提供了各个发行版的资料。这些发行版互相存在关联,例如 Ubuntu 基于 Debian 只开发而 Mint 又基于 Ubuntu 开发,那么我们认为 Mint 同 Debian 也存在关联。
发行版集是一个或多个…

用Python求最大公约数和最小公倍数(51)
小朋友们好,大朋友们好!
我是猫妹,一名爱上Python编程的小学生。
和猫妹学Python,一起趣味学编程。
今日主题
什么是最大公约数?
如何用Python求最大公约数?
什么是最小公倍数? 如何用Pyt…
chatgpt赋能python:Python中的连接符:介绍与应用
Python中的连接符:介绍与应用
在Python编程中,连接符起着关键性的作用,它是连接不同代码部分的纽带。本篇文章将重点介绍几种常用的Python连接符。
一、加号连接符()
加号连接符最常见,用于连接不同的字…