概述
一旦传感器被正确初始化,可以通过SPI或I2C接口向传感器发送读取命令,并接收传感器返回的数据。这个读取过程包括获取LSM6DS3TR传感器提供的加速度计和陀螺仪数据,以及传感器对应的温度信息。
获取数据状态
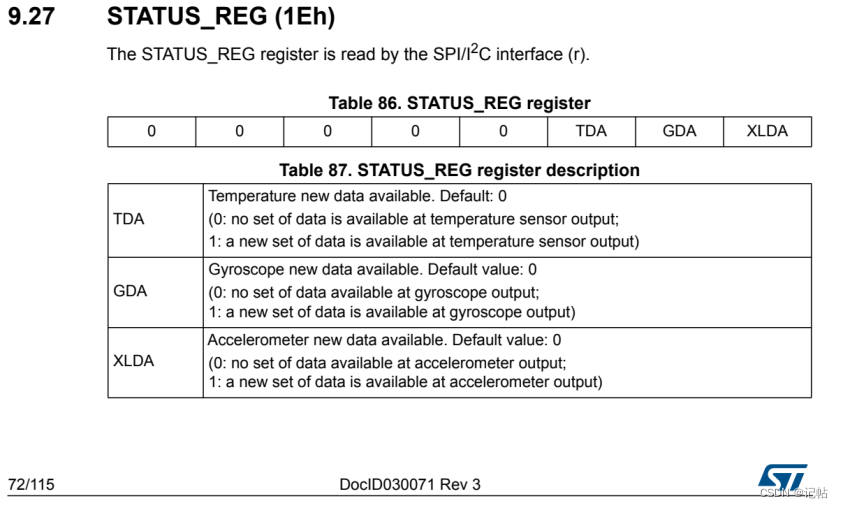
STATUS_REG (1Eh)是该传感器的一个寄存器。在LSM6DS3TR中,STATUS_REG寄存器用于提供传感器的状态信息。
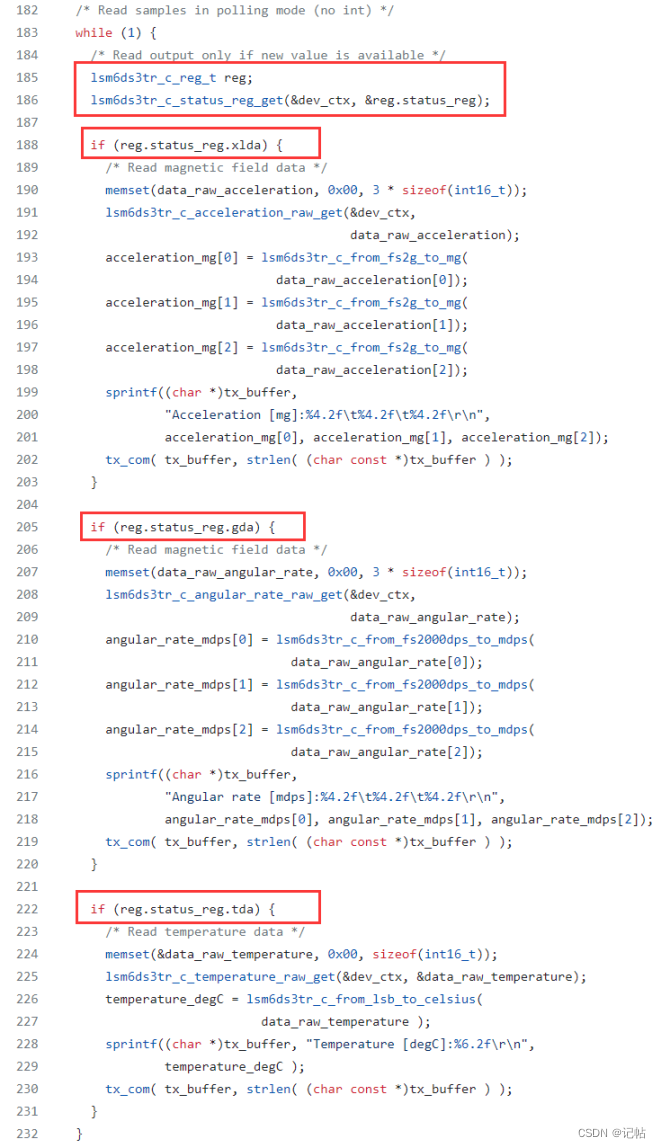
参考程序的获取状态代码如下所示。
对应的获取函数如下。
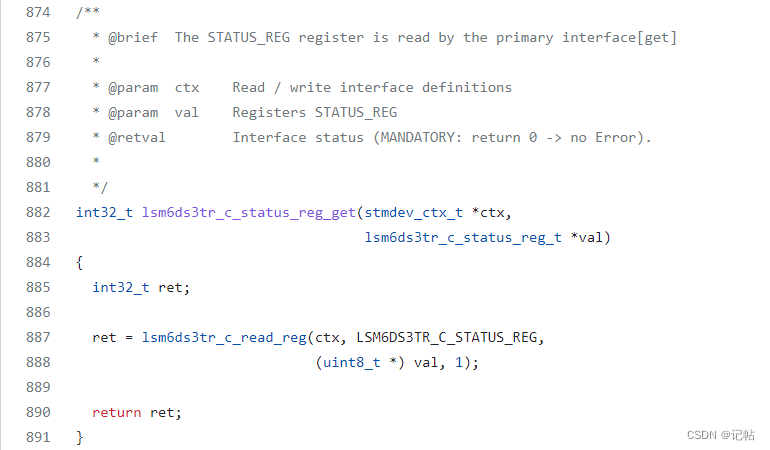
获取STATUS_REG (1Eh)函数如下所示。
#define LSM6DS3TRC_STATUS_REG 0x1E
/***************************************************************************************************************
LSM6DS3TRC Get data status
****************************************************************************************************************/
uint8_t LSM6DS3TRC_Get_Status(void)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_STATUS_REG, buf, 1);
return buf[0];
}
可以判断如下地址来判断温度,加速度,陀螺仪数据新的数据是否获取完毕。
#define LSM6DS3TRC_STATUS_TEMPERATURE 0x04
#define LSM6DS3TRC_STATUS_GYROSCOPE 0x02
#define LSM6DS3TRC_STATUS_ACCELEROMETER 0x01
获取加速度数据
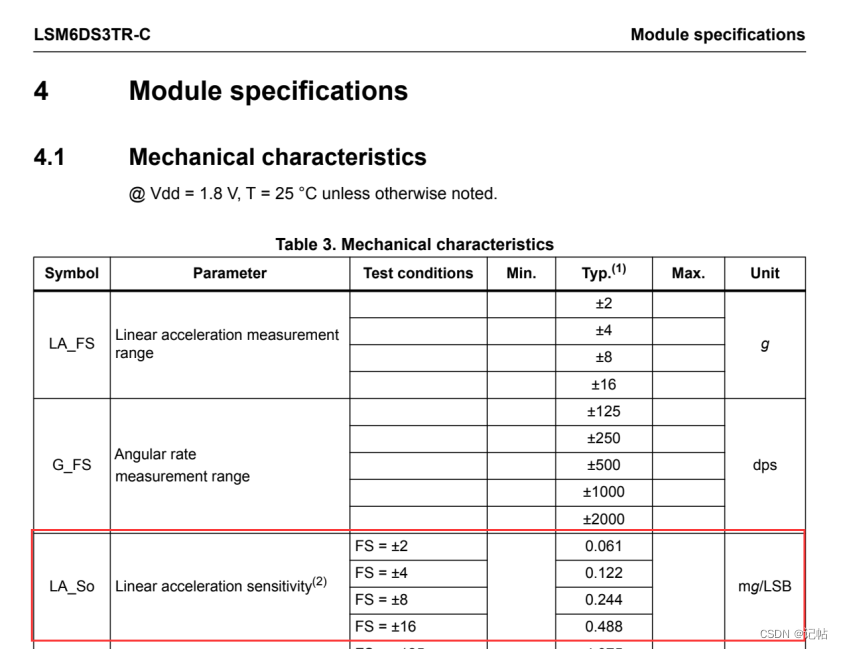
加速度传感器中的"±2g"、“±4g”、“±8g”、“±16g"表示传感器的测量范围或量程,单位为"g”,代表重力加速度。
"g"是地球表面上的重力加速度,大约等于9.8米/秒²。因此,传感器的量程为"±2g"意味着它可以测量从-2g到+2g的加速度范围,即-19.6米/秒²到+19.6米/秒²。同样地,"±4g"的量程为-39.2米/秒²到+39.2米/秒²,"±8g"的量程为-78.4米/秒²到+78.4米/秒²,"±16g"的量程为-156.8米/秒²到+156.8米/秒²。
因此,这些不同的量程表示了传感器可以测量的加速度范围大小。选取适当的量程取决于应用的需求。如果预计测量的加速度值不会超过±2g,那么选择"±2g"的传感器就足够了,而如果需要测量更大范围的加速度,就需要选择具有更高量程的传感器。选择合适的量程可以确保传感器在测量过程中不会超出其最大测量范围,从而提供准确的测量结果。
在参考代码中,当STATUS_REG(0x1E)中的XLDA位为1时,表示已成功获取加速度数据,可以进行读取操作。
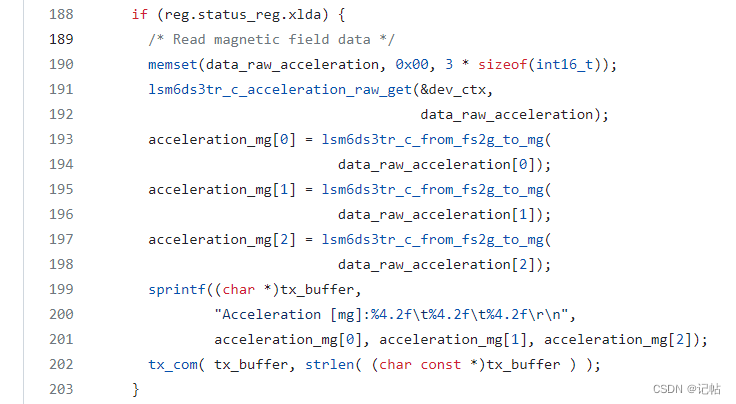
为了获取完整的加速度X轴、Y轴和Z轴数据,可以连续读取6个8位数据,这些数据来自线性加速度输出寄存器,其值表示为一个16位的二进制补码。
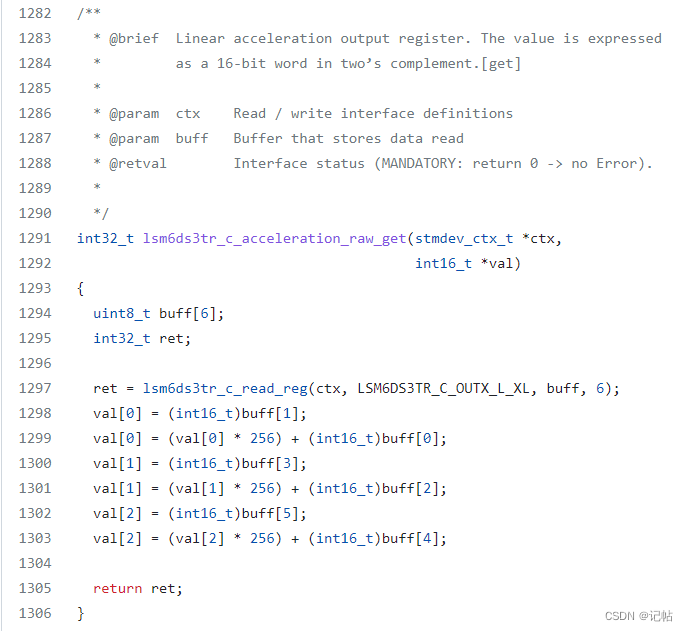
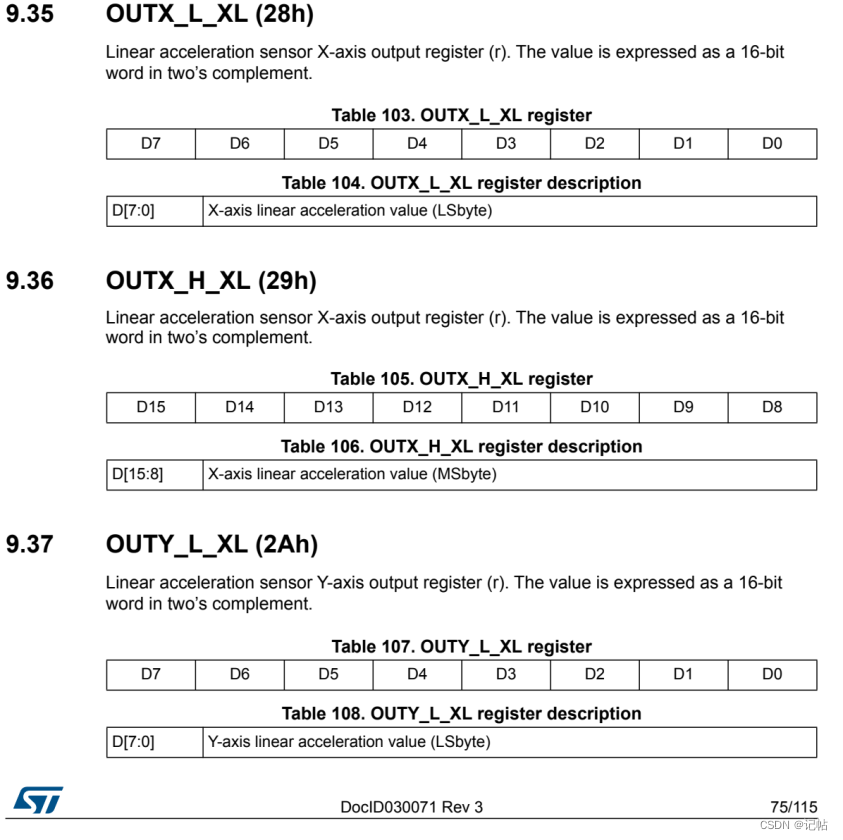
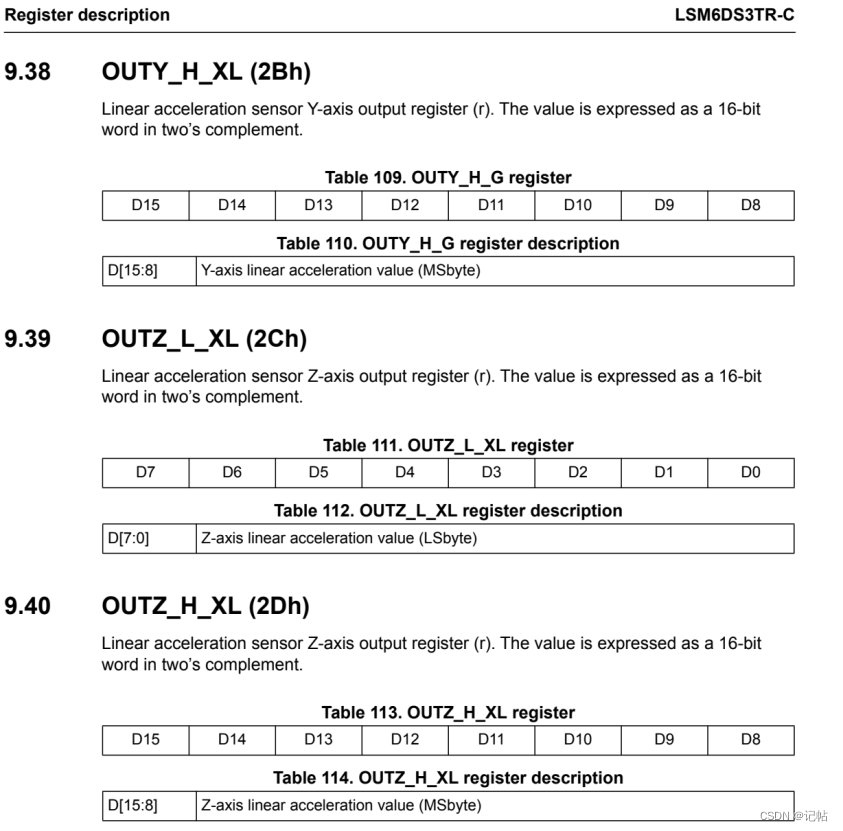
需要注意的是X轴,Y轴,Z轴的加速度数据都是16位的数据。
同时需要乘以一个缩放因子,这个因子是根据传感器的灵敏度或灵敏度刻度确定的。
可以修改为如下所示的代码。
#define LSM6DS3TRC_OUTX_L_XL 0x28
/***************************************************************************************************************
LSM6DS3TRC Get Acceleration Value
****************************************************************************************************************/
void LSM6DS3TRC_Get_Acceleration(uint8_t fsxl, float *acc_float)
{
uint8_t buf[6];
int16_t acc[3];
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_OUTX_L_XL, buf, 6);
acc[0] = buf[1] << 8 | buf[0];
acc[1] = buf[3] << 8 | buf[2];
acc[2] = buf[5] << 8 | buf[4];
switch (fsxl)
{
case LSM6DS3TRC_ACC_FSXL_2G:
acc_float[0] = ((float)acc[0] * 0.061f);
acc_float[1] = ((float)acc[1] * 0.061f);
acc_float[2] = ((float)acc[2] * 0.061f);
break;
case LSM6DS3TRC_ACC_FSXL_16G:
acc_float[0] = ((float)acc[0] * 0.488f);
acc_float[1] = ((float)acc[1] * 0.488f);
acc_float[2] = ((float)acc[2] * 0.488f);
break;
case LSM6DS3TRC_ACC_FSXL_4G:
acc_float[0] = ((float)acc[0] * 0.122f);
acc_float[1] = ((float)acc[1] * 0.122f);
acc_float[2] = ((float)acc[2] * 0.122f);
break;
case LSM6DS3TRC_ACC_FSXL_8G:
acc_float[0] = ((float)acc[0] * 0.244f);
acc_float[1] = ((float)acc[1] * 0.244f);
acc_float[2] = ((float)acc[2] * 0.244f);
break;
}
}
获取陀螺仪数据
在参考代码中,当STATUS_REG(0x1E)中的GDA位为1时,表示已成功获取陀螺仪数据,可以进行读取操作。
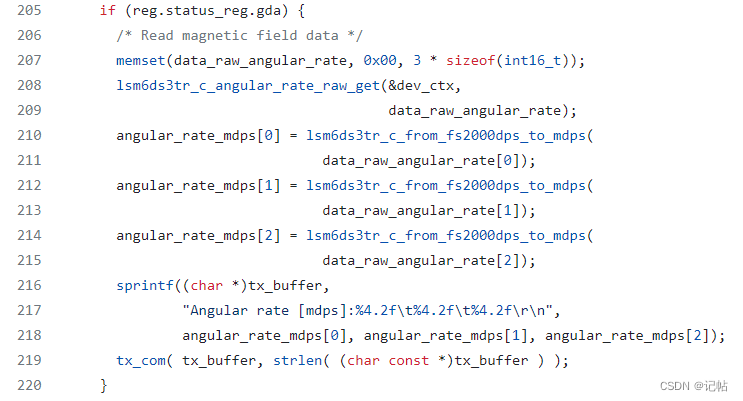
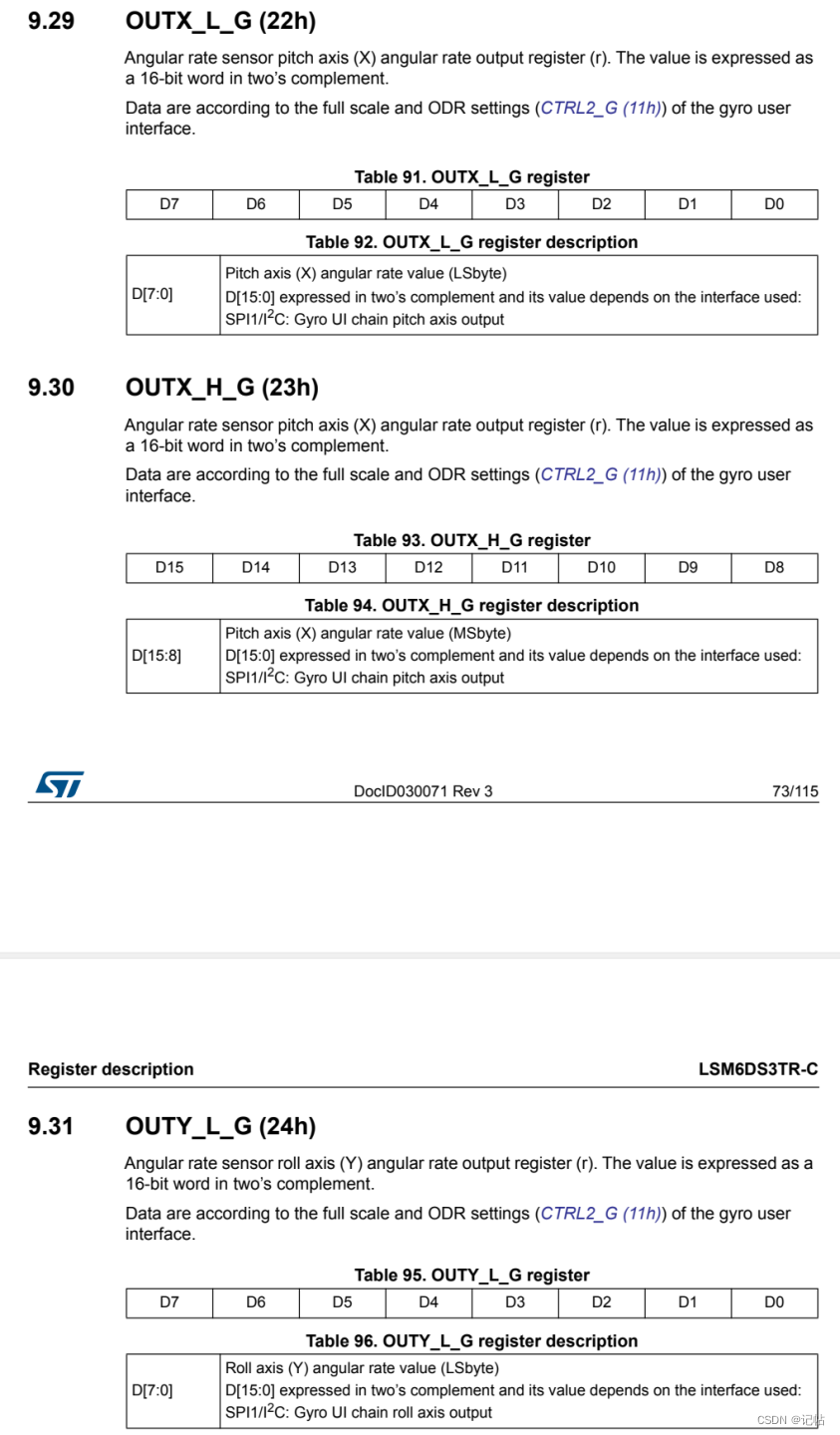
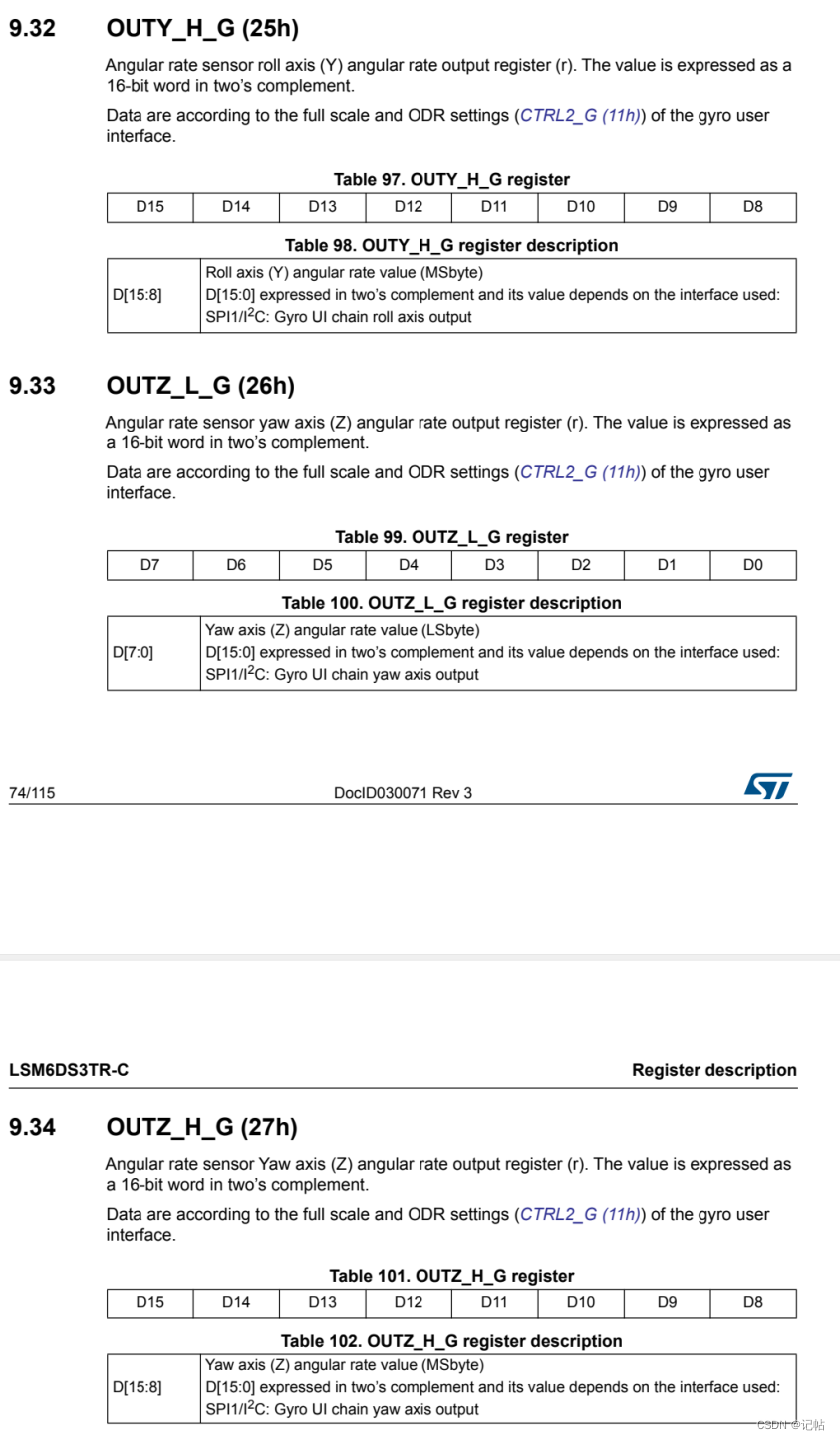
为了获取完整的陀螺仪X轴、Y轴和Z轴数据,可以连续读取6个8位数据,这些数据来自陀螺仪输出寄存器,其值表示为一个16位的二进制补码。
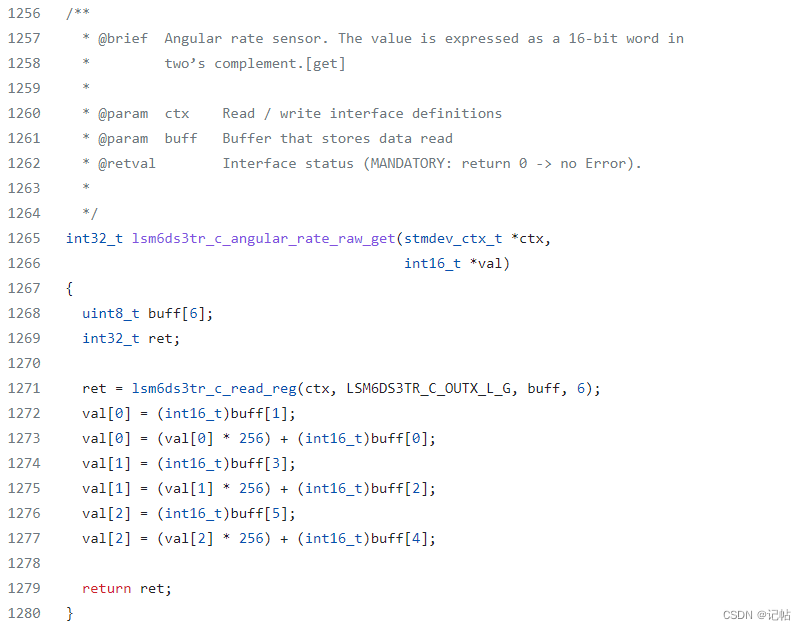
需要注意的是X轴,Y轴,Z轴的陀螺仪数据都是16位的数据。
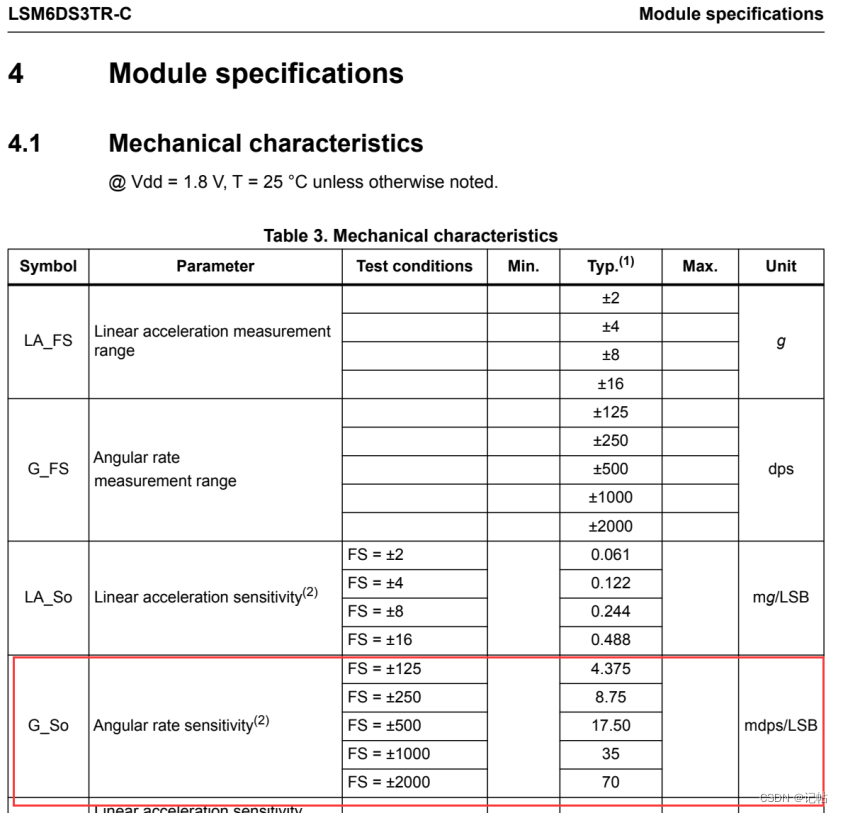
同时需要乘以一个缩放因子,这个因子是根据传感器的灵敏度或灵敏度刻度确定的。
可以修改为如下所示的代码。
#define LSM6DS3TRC_OUTX_L_G 0x22
/***************************************************************************************************************
LSM6DS3TRC Get Gyroscope Value
****************************************************************************************************************/
void LSM6DS3TRC_Get_Gyroscope(uint8_t fsg, float *gry_float)
{
uint8_t buf[6];
int16_t gry[3];
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_OUTX_L_G, buf, 6);
gry[0] = buf[1] << 8 | buf[0];
gry[1] = buf[3] << 8 | buf[2];
gry[2] = buf[5] << 8 | buf[4];
switch (fsg)
{
case LSM6DS3TRC_GYR_FSG_250:
gry_float[0] = ((float)gry[0] * 8.750f);
gry_float[1] = ((float)gry[1] * 8.750f);
gry_float[2] = ((float)gry[2] * 8.750f);
break;
case LSM6DS3TRC_GYR_FSG_500:
gry_float[0] = ((float)gry[0] * 17.50f);
gry_float[1] = ((float)gry[1] * 17.50f);
gry_float[2] = ((float)gry[2] * 17.50f);
break;
case LSM6DS3TRC_GYR_FSG_1000:
gry_float[0] = ((float)gry[0] * 35.00f);
gry_float[1] = ((float)gry[1] * 35.00f);
gry_float[2] = ((float)gry[2] * 35.00f);
break;
case LSM6DS3TRC_GYR_FSG_2000:
gry_float[0] = ((float)gry[0] * 70.00f);
gry_float[1] = ((float)gry[1] * 70.00f);
gry_float[2] = ((float)gry[2] * 70.00f);
break;
}
}
获取温度数据
在参考代码中,当STATUS_REG(0x1E)中的TDA位为1时,表示已成功获取陀螺仪数据,可以进行读取操作。
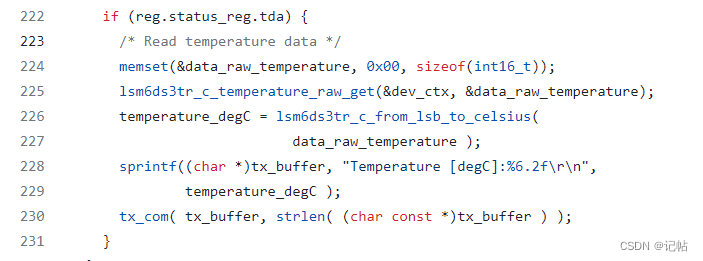
为了获取完整的温度数据,可以连续读取2个8位数据。
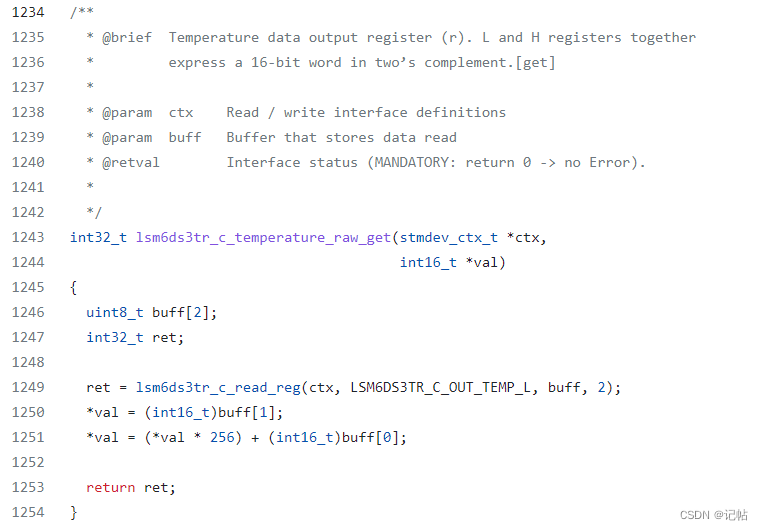
对应的寄存器为OUT_TEMP_L (20h), OUT_TEMP_H (21h)。
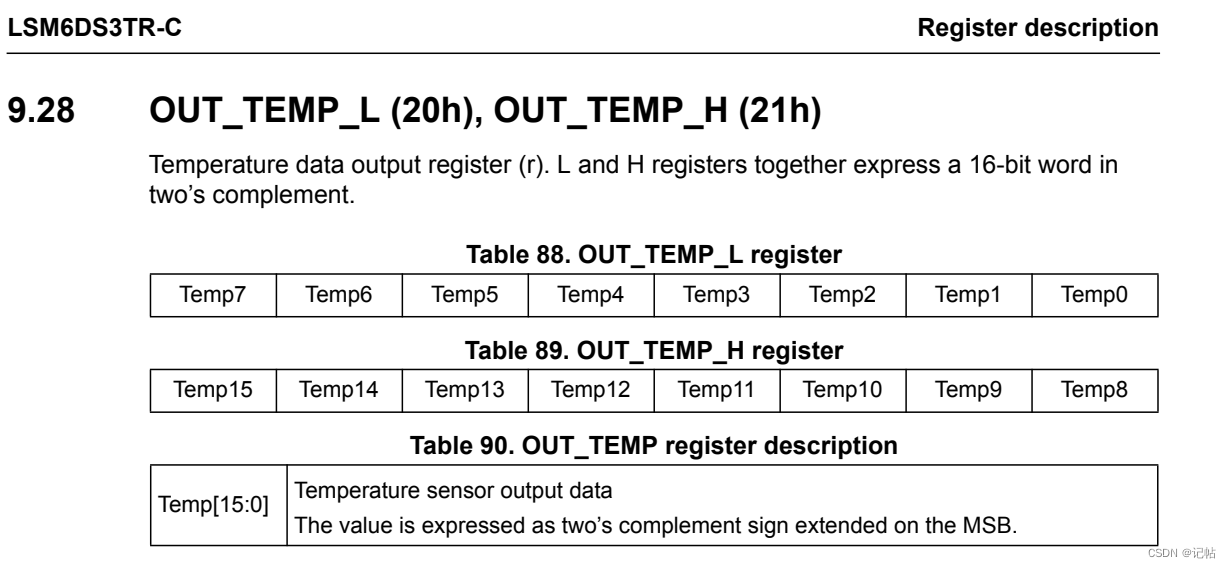
对应温度转换如下所示。
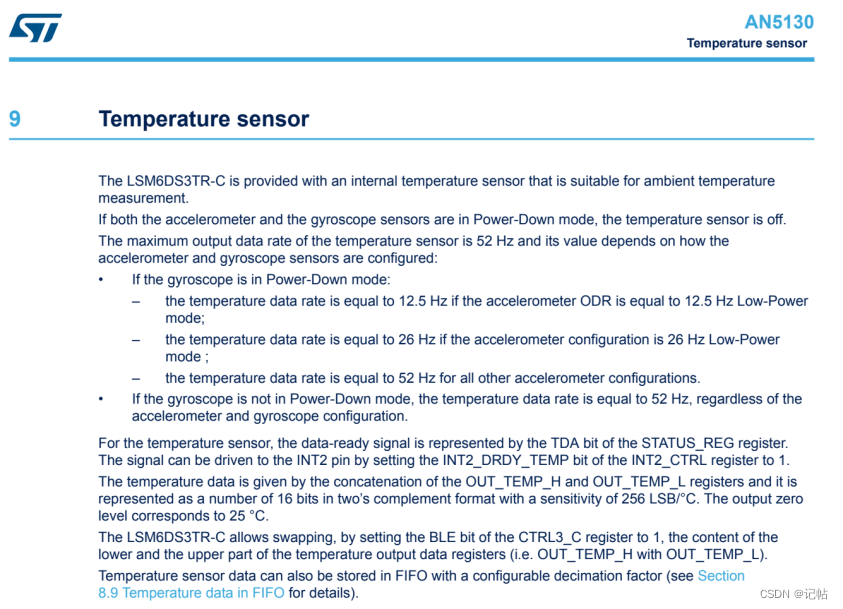
所以获取到的数据需要除以256在加上25度,可以修改为如下所示的代码。
#define LSM6DS3TRC_OUT_TEMP_L 0x20
float LSM6DS3TRC_Get_Temperature(void)
{
uint8_t buf[2];
int16_t temp;
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_OUT_TEMP_L, buf, 2);
temp = buf[1] << 8 | buf[0];
return (((float)temp / 256.0) + 25.0);
}
主程序代码
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
uint8_t status;
status = LSM6DS3TRC_Get_Status();
if (status & LSM6DS3TRC_STATUS_ACCELEROMETER)
{
float acc[3] = {0};
LSM6DS3TRC_Get_Acceleration(LSM6DS3TRC_ACC_FSXL_2G, acc);
printf("\r\nacc:X:%2f,\tY:%2f,\tZ:%2f\r", acc[0], acc[1], acc[2]);
}
if (status & LSM6DS3TRC_STATUS_GYROSCOPE)
{
float gyr[3] = {0};
LSM6DS3TRC_Get_Gyroscope(LSM6DS3TRC_GYR_FSG_2000, gyr);
printf("\rgyr:X:%4.2f,\tY:%4.2f,\tZ:%4.2f\r", gyr[0], gyr[1], gyr[2]);
}
if (status & LSM6DS3TRC_STATUS_TEMPERATURE)
{
printf("\rtemp:%2f\r\n", LSM6DS3TRC_Get_Temperature());
}
HAL_Delay(100);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
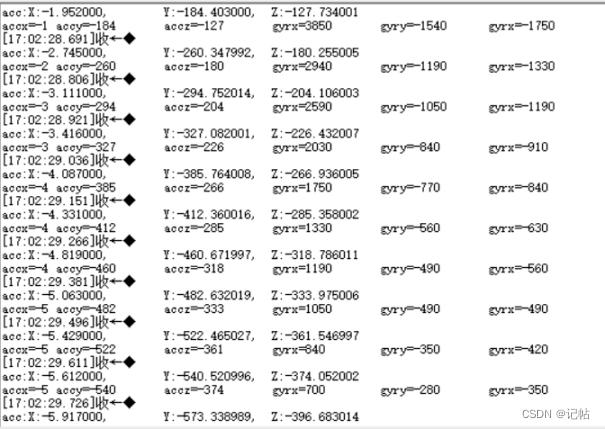
演示