一、 安装usb-cam包和标定数据包
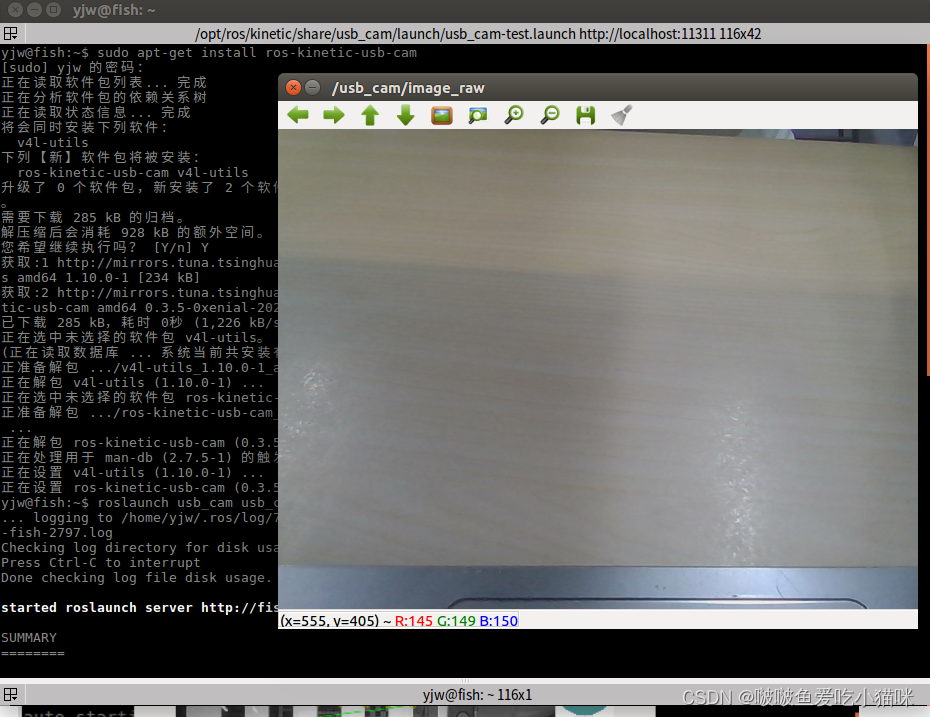
sudo apt-get install ros-kinetic-usb-cam
sudo apt-get install ros-kinetic-camera-calibration 要把kinetic改成你自己的ros版本 。
二、启动相机
roslaunch usb_cam usb_cam-test.launch就会出现一个界面
可以通过下面命令查看相机发布了哪些参数:
rostopic list可以通过下面命令查看发布消息的具体类型:
rostopic info /usb_cam/image_raw
我们可以看到发布者和接收者:

三、启动相机标定包
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.024 image:=/usb_cam/image_raw camera:=/usb_cam
出现黑白相机
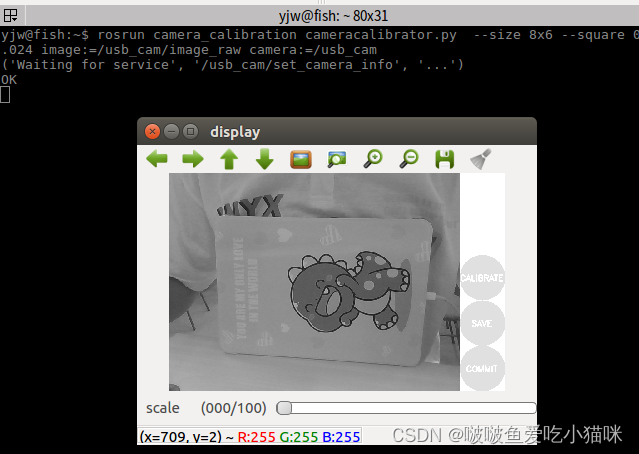
四、进行相机标定
去网上找棋格标定图片,对准电脑摄像头,然后向不同的方向旋转,相机就会捕捉不同角度的图片(当棋盘上出现彩色线条时表面当前画面被有效捕捉,当棋盘差不多占满相机界面的时候捕捉图像成功率最高)。大约捕捉了40张照片(估计要1~5分钟很慢长),右边出现蓝绿色的“calibrate”按钮,就表示标定完成。

点击“calibrate”按钮就会开始计算相机的参数,并在终端显示。之后界面上又会出现三个蓝绿色按钮,点击“save”按钮,就会把参数保存。

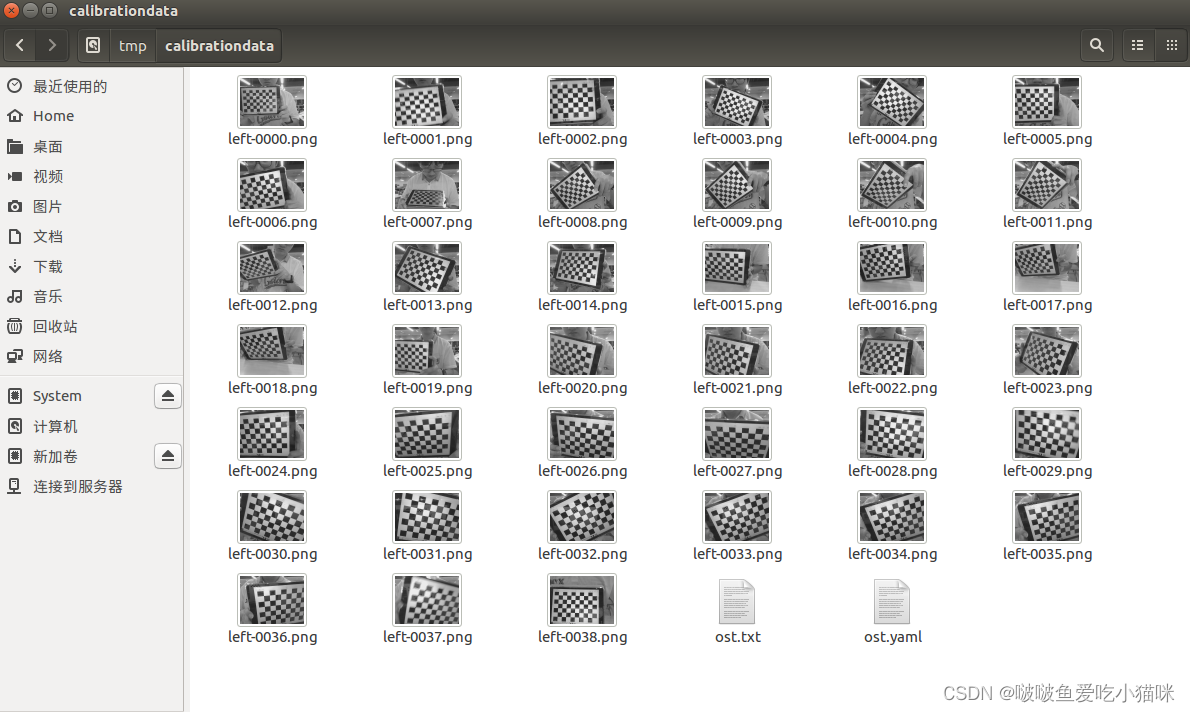
参数保存的地址会显示在终端最后一行。
![]()
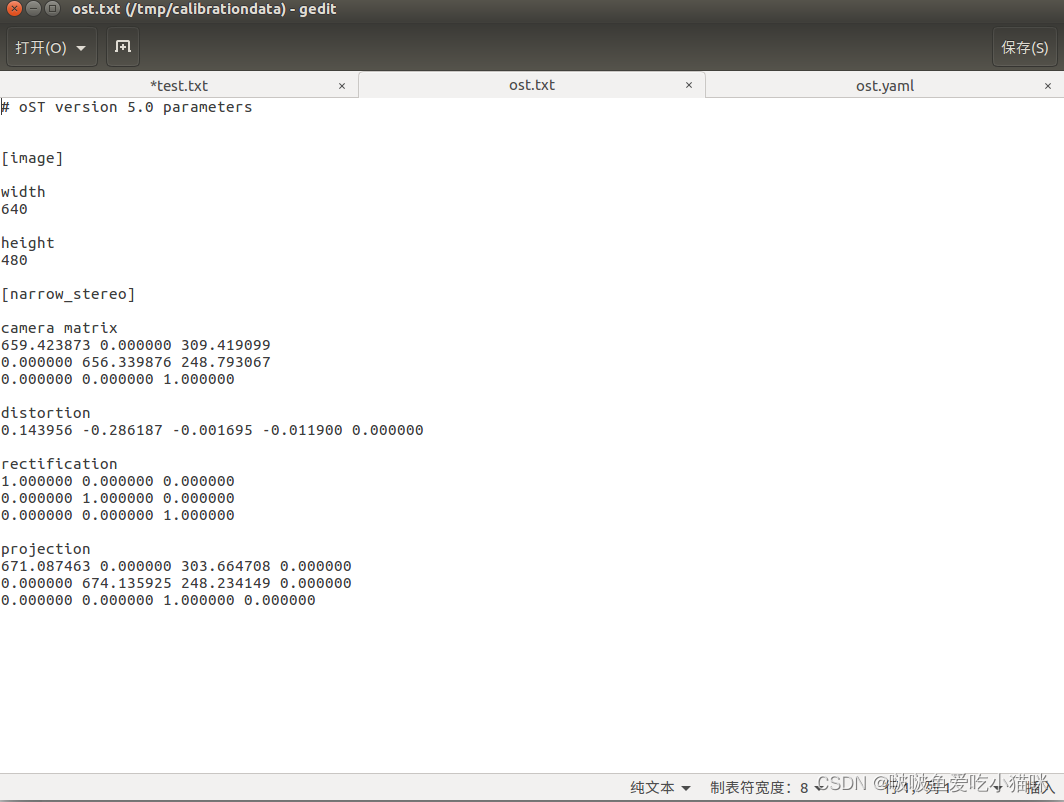
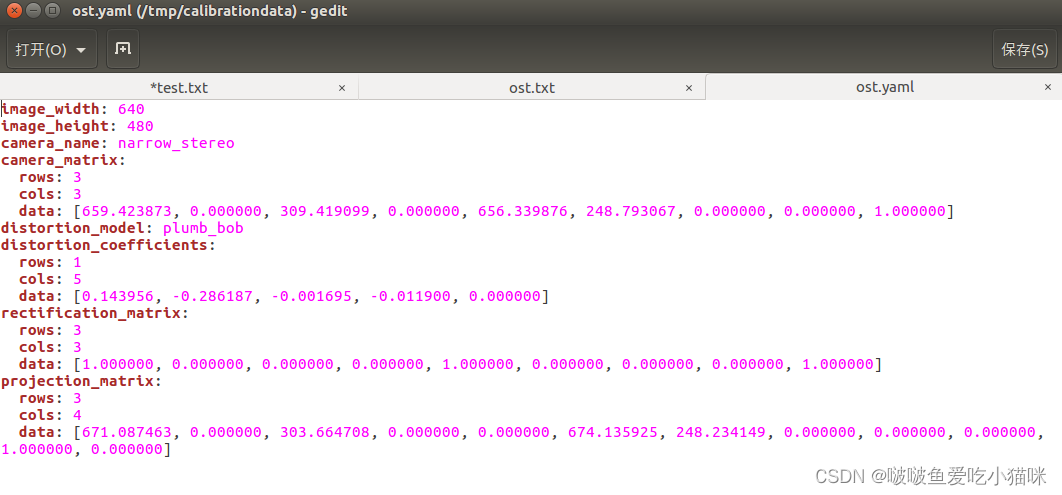
打开保存的位置,可以看到标定时的图片和参数文件“ost.txt”和“ost.yaml”