1. 代码流程
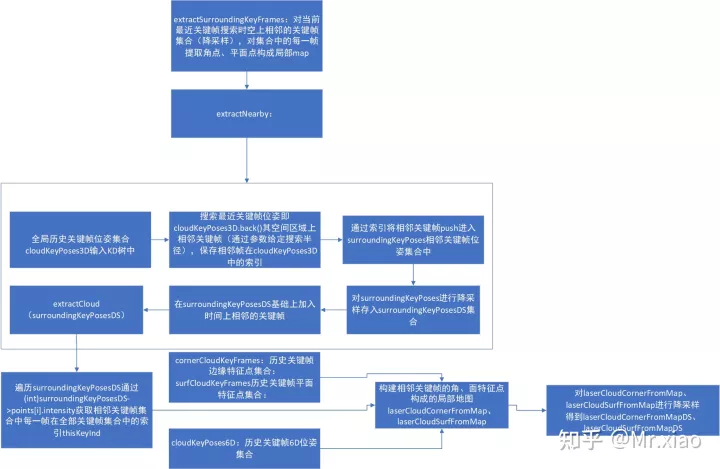
1.1. extractSurroundingKeyFrames()
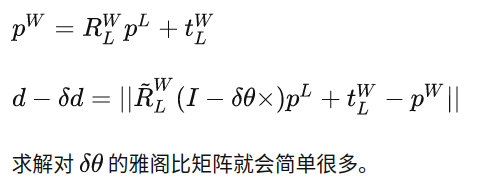
1.2. scan2MapOptimization()

这个函数主要就是进行帧到地图的匹配,通过点到面、点到线的距离距离最小作为优化目标。LOAM中雅阁比矩阵推导其实还是过于复杂了,可以使用进行误差扰动来计算雅阁比矩阵,姿态使用失准角(李代数)模型推导更为简单
1.3. saveKeyFramesAndFactor()
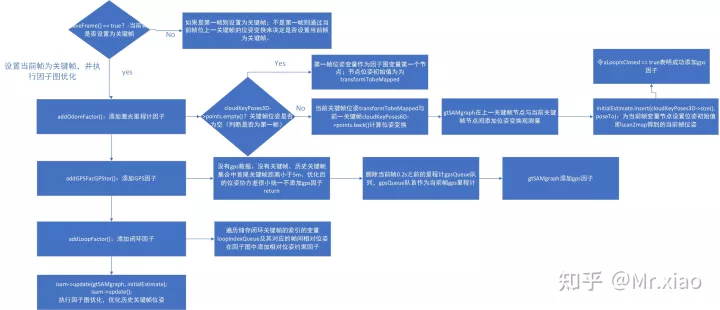
在这个函数一直维持着一个关键帧节点构建的图,将GPS位置、关键帧间相对位姿、闭环关键帧间相对位姿(两帧的点云匹配得到)作为观测值,对关键帧位姿进行优化,在没有GPS情况下,精度主要靠回环。
利用当前关键帧scan2map匹配位姿和上个关键帧优化后的位姿(这一次优化的初值)来计算关键帧间相对位姿观测量,实际上这个观测量对位姿起不到优化的作用。
2. 功能说明
2.1. 第一个巨大的回调函数:lasercloudinfoHandle
这个函数监听的是/feature/cloud_info,关于这个话题里面包含的内容,我已经在featureExtraction.cpp的总结部分说过了。这里回忆一下,cloud_info是作者自定义的一个特殊的msg类型,包含了当前激光帧的角点集合,平面点集合,一维数组,每根线开始的点和结束点在一维数组中的索引……
那么收到数据,先保存时间戳,然后提取已经在featureExtraction.cpp中被提取的角点和平面点信息,保存到*laserCloudCornerLast和*laserCloudSurfLast中。请记住这两个命名。
频率控制:当前时刻-上一时刻>=0.15s时,才开始下列循环:
2.1.1. UpdateInitGuess:当前帧初始化
当关键帧集合为空时,用激光帧的imu原始数据角度数据初始化,并且把数据用lastImuTransformation保存(记住这个命名),返回。
此时推荐回顾一下imageProjection.cpp部分的总结3.2
假如cloudInfo.odomAvailable=true时,那么就用一个transBack来记录cloudInfo.initialGuessX等信息,(这个信息其实来自于imupreintegration.cpp中发布的imu里程计数据),然后记录增量,在之前系统状态transformTobeMapped的基础上,加上这个增量,再次存入transformTobeMapped。 注意这个transformTobeMapped,这个数据结构,在这个cpp里,我们可以理解为就是它在存储着激光里程计部分的系统状态,包括位置与姿态。
注意,这里有一个lastImuPreTransformation,这个用来保存上一时刻imu里程计的数据,根据它和当前的imu里程计来算增量。不要和lastImuTransformation变量混起来,虽然这俩变量名字长的很像。
然后覆盖lastImuTransformation(在这个case里没用到),返回;
假如cloudInfo.imuAvailable=true,那么进入这个case:
注意,lastImuTransformation在1.1.1和1.1.2中并未用到,只是不断的在替换成最新数据。当cloudInfo.odomAvailable一直是true的时候,程序压根也不会进入到这个case。
但是,凡事总有例外,万一哪里没有衔接好,imu里程计没有及时算出来,那么就导致此时激光帧的位姿没有一个初始化的数据(我们之后是要在初始化的基础上进行优化的),那么之后的优化就无从进行。因此,就要用到这个case。
这里主要思路是用imuRollInit数据来初始化,如果你回顾过imageProjection.cpp部分的总结3.2 那么你应该就会懂,这里的数据来源是原始imu数据的角度信息。那么如果这里有数据,就用lastImuTransformation当成最新的上一时刻数据,当前数据transBack和它算一个增量,然后累积到系统值transformTobeMapped上面去。最后更新覆盖lastImuTransformation,返回。
2.1.2. extractSurroundingKeyFrames
这个是比较复杂的一个函数,以下的内容希望读者可以心平气和的,每个字都依次念一遍。
如果没有关键帧,那就算了,返回;
如果有,就调用extractNearby函数。
关键帧是啥?cloudKeyPoses3D,我们要记住这个变量,虽然到现在为止,我们还不知道它是怎么来的,但是这个东西是怎么获取的,我们在后续必须弄明白。
在这里我先剧透一下:它里面装的是历史的“关键帧”的位置,即x,y,z三个值。需要明确:这里装的绝不是历史的关键帧位置处的点云。而是历史关键帧记录时刻机器人所在的位置。
同理还有一个cloudKeyPoses6D,它比这个3D还多了三个角度信息。之所以要用一个6D一个3D分别来装关键帧,我现在直接揭晓答案:用3D装,是因为我们要根据这个来构建KD树,搜索历史上最近的节点。“最近”指的是距离上最近,即xyz空间坐标最近,和角度无关。而cloudKeyPoses6D,是用来投影点云的,把当前帧点云投影到世界坐标系下,那么投影就必须要用角度信息了,所以作者分别用了一个3D和一个6D来装数据。
Kd树的原理我这里不写,随便放一个链接:机器学习——详解KD-Tree原理 - 知乎 ,实际上代码里也只是调库,所以这里我不写。
2.1.3. extractNearby函数
使用kd树,搜索当前最近的关键帧,在给定半径内(默认是50m)所有关键帧最近的位置,并把结果返回到pointSearchInd,把距离返回到pointSearchSqDis中。
根据索引pointSearchInd,把相邻关键帧存入到surroundingKeyPoses中。
下采样,装进surroundingKeyPosesDS中,并在原始的surroundingKeyPoses其中找到最近的一个点,替换掉索引。(关于这个,我的理解是,下采样后不太准确了,好几个不同的关键帧可能因为下采样的原因混成了一个,所以要用原始数据对索引进行一个修正,这样以后才方便根据索引投影点云)
顺手把10s内的关键帧cloudKeyPoses3D中的位置也加入到surroundingKeyPosesDS中。
extractCloud:提取边缘和平面点对应的localmap,把surroundingKeyPosesDS传入到函数中:
对输入的surroundingKeyPosesDS进行遍历,找到50m之内的位置,然后用transformPointCloud把对应位置的点云,进行变换到世界坐标系下。
如何变换呢?根据上面提到的cloudKeyPoses6D的位姿,然后把cornerCloudKeyFrame和surfCloudKeyFrame中根据索引找到点云,投影到世界坐标系下。
那么在这里,cornerCloudKeyFrame和surfCloudKeyFrame是什么?之前从来没有出现过。我这里同样进行剧透,它里面存放的是下采样的点云。注意总结1中的*laserCloudCornerLast和*laserCloudSurfLast这两个东西,这是瞬时点云,这个东西会在之后被下采样,然后装入cornerCloudKeyFrame中。
在角点点云和平面点点云被投影到世界坐标系下后,会被加入到laserCloudCornerFromMap和laserCloudSurfFromMap等数据结构中,然后再合出一个pair类型的Container<关键帧号,<角点集合,平面点集合>>。
2.1.4. downsampleCurrentScan
这部分比较简单,就是对最外层的回调函数中的laserCloudCornerLast之类的东西,进行一个下采样,保存到laserCloudCornerLastDS这些以DS结尾的数据结构中,并且把数目存到laserCloudCornerLastDSNum这种以DSNUM结尾的数据结构中。其实就是代表了当前帧点云的角点/平面点的下采样集合,和数目值。
2.1.5. Scan2MapOptimization
这个函数是本cpp中第二复杂的函数。我们现在把它展开。
首先,没有关键帧保存,那就返回,不处理;
如果DSNUM这种记录角点和平面点的数据结构中,发现数目不够多,也不处理;只有在数目足够多的时候才进行处理,默认最少要10个角点,100个平面点。
迭代30次:
边缘点匹配优化:CornerOptimization
平面点匹配优化:SurfOptimization
组合优化多项式系数:combineOptimizationCoeffs
LMOptimization判断迭代误差是否足够小,如果是true则认为迭代完成,返回;
transformUpdate:原始的imu的rpy,在这里和优化后的激光里程计位姿进行一个加权融合。 接下来,我们依次展开这些函数:
边缘点匹配优化:CornerOptimization
把系统状态transformTobeMapped做一个数据格式转换,变成transPointAssociateToMap形式
从当前角点下采样集合laserCloudCornerLastDS进行遍历,找到世界坐标系下最近的5个点,要求小于1m。
求5个样本的均值,协方差矩阵。对协方差矩阵进行特征值分解,如果最大特征值大于次大特征值的3倍,那么就认为构成线。
一旦发现构成线,那么就在均值沿着最大特征向量方向(把它看成线的方向)前后各取一个点(+-0.1 x 方向)。
X0为当前点,X1和X2为“X0附近的5个点一起算出的均值沿方向前后各取的一点”,叉乘计算三点面积a012,x1x2底边长度l12。然后再做一次叉乘,得到X0距离x1,x2连线的垂线段的单位方向向量(la,lb,lc)。并计算点到直线的距离ld2=a012/l12。
用一个鲁棒和函数,使得距离ld2越大,s越小。然后用coeff来保存“鲁棒后”的距离,和“鲁棒后”的点到线的垂线的方向向量。
如果点到直线的距离小于1m,那么存入数据结构,laserCloudOriCornerVec为原始点云,coeffSelCornerVec为鲁棒距离和鲁棒向量,laserCloudOriCornerFlag代表当前点X0 已经找到对应的线。
思考:为什么要加入方向向量呢?是因为这个在优化的偏导数中会被用到。
平面点匹配优化:SurfOptimization
和上面的同理,对系统状态量transformTobeMapped进行数据格式转换;
从当前角点下采样集合laserCloudSurfLastDS进行遍历,找到世界坐标系下最近的5个点,要求小于1m。
直接用matA0存储这个5个点,求解Ax+By+Cz+1=0的ABC系数(用QR分解)
然后对ABCD,代码中为pa,pb,pc,pd=1进行单位化。
根据点x0到平面的距离d=d=\frac{|Ax_0+By_0+Cz_0+D|}{\sqrt{A^2+B^2+C^2}} (分母为1)判断是否构成平面。如果有一个大于0.2m则不构成。
pd2为点到平面的距离,也用鲁棒和函数处理,并且比上两次开方(这点我不理解,我猜就是用来鲁棒的,换成1次开方可能也差不多,意义或许不大),然后和角点部分类似,得到s,存入数据结构。
组合优化多项式系数:combineOptimizationCoeffs
这个比较简单,就是把CornerOptimization和SurfOptimization中已经确定匹配关系的点提取出来,laserCloudOri统一把角点和平面点装在一起,coeffSel统一装之前计算得到的“鲁棒优化向量”(角点就是点到直线的“鲁棒垂线”,平面点就是点到平面的“鲁棒法线”)。
优化向量会在LMOptimization中进行优化。
LMOptimization判断迭代误差是否足够小,如果是true则认为迭代完成,返回。
这一部分大内容,主要麻烦在原理上面。
这里推荐一个阅读:LIO-SAM-scan2MapOptimization()优化原理及代码解析
这个文章中公式写的非常好。我就不照搬了。
另外在推导部分,可以仔细研究一下这篇文章:
LeGO-LOAM中的数学公式推导
虽然是Lego-loam的推导,但是Lego-loam和lio-sam在这部分的原理是一样的,因此可以通用。看完这篇文章,就能理解1.4.2.3中我提到的“优化向量”是干啥用的。
总之,照着原理,构建JtJ*delt_x=-JTf,然后构建MatAtA,matAtB,利用cv:solve提供的QR分解,得到matX,即delta_x。
当特征点缺乏时,状态估计方法会发生退化。特征值小于阈值,则视为退化方向向量。这块的理论,可以参考LOAM SLAM原理之防止非线性优化解退化
更新位姿,判断收敛与否。那么真正的雷达里程计系统状态transformTobeMapped,就是在这里被更新。
1.4.3 transformUpdate:原始的imu的rpy,在这里和优化后的激光里程计位姿进行一个加权融合。
当imuAvailable=True的时候,并且俯仰角<1.4,那么对位姿和原始imu的rpy做一个加权平均,(权重在配置文件中可以被设置为0.01)。主要是对roll,pitch仅加权平均,并且对z进行一个高度约束(也就是clip,不得超过配置文件中的z_tollerance,这个主要是一个小trick,应对不能飞起来的无人小车用的),更新transformTobeMapped。
好了,那么 现在回到回调函数的主流程:
1.5 saveKeyFramesAndFactor:之前函数二话不说就用了一些并没有出现过的数据结构,例如什么cloudKeyPoses3D,cornerCloudKeyFrame之类的东西,看完这个函数将明白这些变量是怎么来的。
1.5.1 saveFrame:计算当前帧和前一帧位姿变换,如果太小不设关键帧。默认是角度<0.2,距离<1m,两者不满足其一就不保存;
1.5.2 addOdomFactor:
这个是要加入激光里程计因子,给图优化的模型gtSAMgraph。在1.5之前别的函数里,如果没有关键帧,直接就跳过了。但是这里不能跳过。
如果暂时还没有关键帧,就把当前激光系统状态transformTobeMapped,打包成一个PriorFactor加入到gtSAMgraph里。如果目前已经有关键帧了,就把最后一个关键帧,和当前状态transformTobeMapped计算一个增量,把这个增量打包成一个BetweenFactor,加入到gtSAMgraph里头去。
initialEstimate代表变量初值,用transformTobeMapped赋值。
1.5.3 addGpsFactor:
GPS的筛选规则为:如果没有GPS信息,没有关键帧信息,首尾关键帧小于5m,或者位姿的协方差很小(x,y的协方差阈值小于25),就不添加GPS。
否则,遍历GPS列表,当前帧0.2s以前的不要,或者GPS的协方差太大了也不要,无效数据也不要…… 找到正常数据,打包成一个gps_factor,加入gtSAMgraph里面。
1.5.4 addLoopFactor:
这个其实和当前的回调函数无关,因为当前回调函数监听的是/feature/cloud_info信息,回环是由其他线程监控和检测的。那么在这里,它查询回环队列,加入回环因子,就是一个顺手的事情,反正现在要更新优化,那么查一下,如果有候选的等在那里,就顺手加入优化。如果用做饭来比喻这件事,那么另外的回环检测的线程就是相当于另一个人在备菜,这里addLoopFactor相当于是在炒菜,备好了就先炒,没有备好就算了。
1.5.5 gtsam正常更新。如果有回环那就多更新几次。
1.5.6 把cloudKeyPoses3D,cloudKeyPoses6D,分别装上信息,cloudKeyPoses3D代表关键帧的位置,cloudKeyPoses6D代表关键帧的位置+姿态,为什么要有一个3D一个6D呢?6D里不已经包含了3D信息吗?这个问题我在1.2处已经解释过了。
1.5.7 用优化结果更新transformTobeMapped。
1.5.8 cornerCloudKeyFrames,surfCloudKeyFrames装入信息,回顾一下,回调函数开头收到的点云数据为laserCloudCornerLast,laserCloudSurfLast,然后在downsampleCurrentScan处这俩信息被下采样,加上了DS后缀。在这里把它装到cornerCloudKeyFrames和surfCloudKeyFrames中。
(回顾:cornerCloudKeyFrames代表关键帧位置处的角点点云,surfCloudKeyFrames代表关键帧位置处的平面点点云。这俩东西就是上面1.2处extractSurroundingKeyFrames用到的内容,cornerCloudKeyFrames通过cloudKeyPoses6D变换到世界系下,被存到laserCloudCornerFromMap里面,这个FromMap又在scan2MapOptimization函数中被设置到kdtreeCornerFromMap这个Kd树里,在cornerOptimization函数里,就是把当前帧的激光点云依据1.1的初值transformTobeMapped,变换到世界坐标系下,再用kdtreeCornerFromMap进行kd搜索,建立匹配关系,优化transformTobeMapped。)
1.5.9 updatePath,更新里程计轨迹。把cloudKeyPoses6D传入,保存在globalPath中。不过暂时还没有进行发布。
1.6 correctPoses:
如果发现回环的话,就把历史关键帧通通更新一遍。我们刚刚在1.5.5里面虽然更新过了,但是结果都是保存在gtsam里面的,cloudKeyPoses3D和cloudKeyPoses6D,这俩保存位置和位姿的变量仍然保留着更新前的关键帧位姿。所以就根据更新结果,把他俩更新一遍。
为什么不更新cornerCloudKeyFrames和surfCloudKeyFrames呢?因为没有必要更新,这俩存的是机器人坐标系下的点云,和机器人在世界系下的位姿是无关的。
1.7 publishOdometry:
到此为止,激光里程计部分的transformTobeMapped就不再更新了。回顾一下transformTobeMapped经历了哪些变换:在1.1部分用imu角度初值或是imu里程计初值赋值,然后在scan2mapOptimization里面根据点到线、点到面的方程进行更新,再在transformUpdate里和原始imu的rpy信息进行一个很小的加权融合(不过这一步我觉得没啥大用),最后在saveKeyFrameAndFactor里面再加入GPS因子和回环因子进行一轮优化。
最后把transformTobeMapped发布出去,其他cpp文件里,接收的“激光里程计”就是这么个东西。也就是lio_sam/mapping/odometry_incremental.
1.8 publishFrames:
这个纯粹就是把乱七八糟东西都发布出去,不管有没有用。如果用户需要就可以监听它。
1.8.1发布关键帧位姿集合,把cloudKeyPoses3D发布成lio_sam/mapping/trajectory
1.8.2发布局部降采样平面点,把laserCloudSurfFromMapDS(历史默认50m内的点,在extractCloud中被设置),发布为lio_sam/mapping/map_local
1.8.3发布当前帧的下采样角点和平面点,用优化后的激光里程计位姿transformTobeMapped投影到世界系下发布,/lio_sam/mapping/cloud_registered
1.8.4发布原始点云经过配准的点云:输入的/feature/cloud_info的cloud_deskewed字段是由featureExtraction.cpp发布的,其cloud_deskewed是源于imageProjection.cpp发布的原始去畸变点云。把它发布到世界坐标系下,然后以/lio_sam/mapping/cloud_registered_raw的形式发布。
1.8.5发布轨迹,把1.5.9里装好在globalPath里面但是还没有发布的轨迹发布出去,名为/lio_sam/mapping/path。
那么到现在,基本上mapOptimization.cpp的内容就结束了,但是还有一些尾巴:
2.gpshandle:监听GPS数据,保存到GPS队列里。
3.loopinfohandle:监听"lio_loop/loop_closure_detection",订阅来自外部闭环检测程序提供的闭环数据,本程序没有提供,这里实际没用上。
4.loopClosureThread:这个线程在主函数里单独开了一个线程,简要说一下:
4.1 读取配置文件中是否开启回环检测。
4.2开始无限循环:
4.2.1 performLoopClosure:
在历史帧中搜索距离关键帧最近,时间间各较远的关键帧(默认是30s以外,15m以内)没找到就返回,如果找到了,结果就放在loopKeyPre当中,loopKeyCur保存最近一个关键帧。
把最近一个关键帧的特征点提出来,放入cureKeyframeCloud里;回环候选帧前后各25帧也提取出来,放入prevKeyframeCloud里。
把prevKeyframeCloud发布出去,名为lio_sam/mapping/icp_loop_closure_history/cloud
调用pcl库的icp轮子,设定阈值,参数,用setInputSource,setInputTarget传入两个点云,用align对齐。成功阈值设定为0.3,成功则存在icp.getFinalTransformation里面。把当前关键帧的点云,用这个结果icp.getFinalTransformation,转换以后,以lio_sam/mapping/icp_loop_closure_corrected_cloud发布出去。
把当前帧的的位姿用icp.getFinalTransformation结果校正一下,把pair<当前,回环>,间隔位姿,噪声用队列存起来,等待addLoopFactor来调用,即上面的1.5.4部分。
4.2.2 visualizeLoopClosure:
这部分内容没啥好说的,就是用于rviz展示,把关键帧节点和二者的约束用点和线连起来,以lio_sam/mapping/loop_closure_constraints发布出去。
5. 最后一个线程,visualizeGlobalMapThread:
这个主要是两块内容:
5.1 publishGlobalmap:把当前关键帧附近1000m(默认)的关键帧找出来(其实也就是全局的了),降采样,变换到世界系下,然后发布为lio_sam/mapping/map_global.
5.2 saveMapService:这个用来保存pcd格式的点云地图。在配置文件中可以设置开启与否,和存储位置。注意,当程序结束时,ctrl+c以后,才会启动保存任务。这个部分的代码,和发布globalmap部分的核心内容基本一致,反正就是把cornerCloudKeyFrames,surfCloudKeyFrames用cloudKeyPoses6D变换到世界系下,分别保存角点pcd和平面点pcd,以及全局(合起来)的pcd文件。
3. 代码
#include "utility.h"
#include "lio_sam/cloud_info.h"
#include "lio_sam/save_map.h"
#include <gtsam/geometry/Rot3.h>
#include <gtsam/geometry/Pose3.h>
#include <gtsam/slam/PriorFactor.h>
#include <gtsam/slam/BetweenFactor.h>
#include <gtsam/navigation/GPSFactor.h>
#include <gtsam/navigation/ImuFactor.h>
#include <gtsam/navigation/CombinedImuFactor.h>
#include <gtsam/nonlinear/NonlinearFactorGraph.h>
#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>
#include <gtsam/nonlinear/Marginals.h>
#include <gtsam/nonlinear/Values.h>
#include <gtsam/inference/Symbol.h>
#include <gtsam/nonlinear/ISAM2.h>
using namespace gtsam;
using symbol_shorthand::X; // Pose3 (x,y,z,r,p,y)
using symbol_shorthand::V; // Vel (xdot,ydot,zdot)
using symbol_shorthand::B; // Bias (ax,ay,az,gx,gy,gz)
using symbol_shorthand::G; // GPS pose
/**
* 6D位姿点云结构定义
*/
struct PointXYZIRPYT
{
PCL_ADD_POINT4D
PCL_ADD_INTENSITY;
float roll;
float pitch;
float yaw;
double time;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
} EIGEN_ALIGN16;
POINT_CLOUD_REGISTER_POINT_STRUCT (PointXYZIRPYT,
(float, x, x) (float, y, y)
(float, z, z) (float, intensity, intensity)
(float, roll, roll) (float, pitch, pitch) (float, yaw, yaw)
(double, time, time))
typedef PointXYZIRPYT PointTypePose;
class mapOptimization : public ParamServer
{
public:
// gtsam
NonlinearFactorGraph gtSAMgraph;
Values initialEstimate;
Values optimizedEstimate;
ISAM2 *isam;
Values isamCurrentEstimate;
Eigen::MatrixXd poseCovariance;
ros::Publisher pubLaserCloudSurround;
ros::Publisher pubLaserOdometryGlobal;
ros::Publisher pubLaserOdometryIncremental;
ros::Publisher pubKeyPoses;
ros::Publisher pubPath;
ros::Publisher pubHistoryKeyFrames;
ros::Publisher pubIcpKeyFrames;
ros::Publisher pubRecentKeyFrames;
ros::Publisher pubRecentKeyFrame;
ros::Publisher pubCloudRegisteredRaw;
ros::Publisher pubLoopConstraintEdge;
ros::Subscriber subCloud;
ros::Subscriber subGPS;
ros::Subscriber subLoop;
ros::ServiceServer srvSaveMap;
std::deque<nav_msgs::Odometry> gpsQueue;
lio_sam::cloud_info cloudInfo;
// 历史所有关键帧的角点集合(降采样)
vector<pcl::PointCloud<PointType>::Ptr> cornerCloudKeyFrames;
// 历史所有关键帧的平面点集合(降采样)
vector<pcl::PointCloud<PointType>::Ptr> surfCloudKeyFrames;
// 历史关键帧位姿(位置)
pcl::PointCloud<PointType>::Ptr cloudKeyPoses3D;
// 历史关键帧位姿
pcl::PointCloud<PointTypePose>::Ptr cloudKeyPoses6D;
pcl::PointCloud<PointType>::Ptr copy_cloudKeyPoses3D;
pcl::PointCloud<PointTypePose>::Ptr copy_cloudKeyPoses6D;
// 当前激光帧角点集合
pcl::PointCloud<PointType>::Ptr laserCloudCornerLast;
// 当前激光帧平面点集合
pcl::PointCloud<PointType>::Ptr laserCloudSurfLast;
// 当前激光帧角点集合,降采样,DS: DownSize
pcl::PointCloud<PointType>::Ptr laserCloudCornerLastDS;
// 当前激光帧平面点集合,降采样
pcl::PointCloud<PointType>::Ptr laserCloudSurfLastDS;
// 当前帧与局部map匹配上了的角点、平面点,加入同一集合;后面是对应点的参数
pcl::PointCloud<PointType>::Ptr laserCloudOri;
pcl::PointCloud<PointType>::Ptr coeffSel;
// 当前帧与局部map匹配上了的角点、参数、标记
std::vector<PointType> laserCloudOriCornerVec;
std::vector<PointType> coeffSelCornerVec;
std::vector<bool> laserCloudOriCornerFlag;
// 当前帧与局部map匹配上了的平面点、参数、标记
std::vector<PointType> laserCloudOriSurfVec;
std::vector<PointType> coeffSelSurfVec;
std::vector<bool> laserCloudOriSurfFlag;
map<int, pair<pcl::PointCloud<PointType>, pcl::PointCloud<PointType>>> laserCloudMapContainer;
// 局部map的角点集合
pcl::PointCloud<PointType>::Ptr laserCloudCornerFromMap;
// 局部map的平面点集合
pcl::PointCloud<PointType>::Ptr laserCloudSurfFromMap;
// 局部map的角点集合,降采样
pcl::PointCloud<PointType>::Ptr laserCloudCornerFromMapDS;
// 局部map的平面点集合,降采样
pcl::PointCloud<PointType>::Ptr laserCloudSurfFromMapDS;
// 局部关键帧构建的map点云,对应kdtree,用于scan-to-map找相邻点
pcl::KdTreeFLANN<PointType>::Ptr kdtreeCornerFromMap;
pcl::KdTreeFLANN<PointType>::Ptr kdtreeSurfFromMap;
pcl::KdTreeFLANN<PointType>::Ptr kdtreeSurroundingKeyPoses;
pcl::KdTreeFLANN<PointType>::Ptr kdtreeHistoryKeyPoses;
// 降采样
pcl::VoxelGrid<PointType> downSizeFilterCorner;
pcl::VoxelGrid<PointType> downSizeFilterSurf;
pcl::VoxelGrid<PointType> downSizeFilterICP;
pcl::VoxelGrid<PointType> downSizeFilterSurroundingKeyPoses; // for surrounding key poses of scan-to-map optimization
ros::Time timeLaserInfoStamp;
double timeLaserInfoCur;
float transformTobeMapped[6];
std::mutex mtx;
std::mutex mtxLoopInfo;
bool isDegenerate = false;
cv::Mat matP;
// 局部map角点数量
int laserCloudCornerFromMapDSNum = 0;
// 局部map平面点数量
int laserCloudSurfFromMapDSNum = 0;
// 当前激光帧角点数量
int laserCloudCornerLastDSNum = 0;
// 当前激光帧面点数量
int laserCloudSurfLastDSNum = 0;
bool aLoopIsClosed = false;
map<int, int> loopIndexContainer; // from new to old
vector<pair<int, int>> loopIndexQueue;
vector<gtsam::Pose3> loopPoseQueue;
vector<gtsam::noiseModel::Diagonal::shared_ptr> loopNoiseQueue;
deque<std_msgs::Float64MultiArray> loopInfoVec;
nav_msgs::Path globalPath;
// 当前帧位姿
Eigen::Affine3f transPointAssociateToMap;
// 前一帧位姿
Eigen::Affine3f incrementalOdometryAffineFront;
// 当前帧位姿
Eigen::Affine3f incrementalOdometryAffineBack;
/**
* 构造函数
*/
mapOptimization()
{
// ISM2参数
ISAM2Params parameters;
parameters.relinearizeThreshold = 0.1;
parameters.relinearizeSkip = 1;
isam = new ISAM2(parameters);
// 发布历史关键帧里程计
pubKeyPoses = nh.advertise<sensor_msgs::PointCloud2>("lio_sam/mapping/trajectory", 1);
// 发布局部关键帧map的特征点云
pubLaserCloudSurround = nh.advertise<sensor_msgs::PointCloud2>("lio_sam/mapping/map_global", 1);
// 发布激光里程计,rviz中表现为坐标轴
pubLaserOdometryGlobal = nh.advertise<nav_msgs::Odometry> ("lio_sam/mapping/odometry", 1);
// 发布激光里程计,它与上面的激光里程计基本一样,只是roll、pitch用imu数据加权平均了一下,z做了限制
pubLaserOdometryIncremental = nh.advertise<nav_msgs::Odometry> ("lio_sam/mapping/odometry_incremental", 1);
// 发布激光里程计路径,rviz中表现为载体的运行轨迹
pubPath = nh.advertise<nav_msgs::Path>("lio_sam/mapping/path", 1);
// 订阅当前激光帧点云信息,来自featureExtraction
subCloud = nh.subscribe<lio_sam::cloud_info>("lio_sam/feature/cloud_info", 1, &mapOptimization::laserCloudInfoHandler, this, ros::TransportHints().tcpNoDelay());
// 订阅GPS里程计
subGPS = nh.subscribe<nav_msgs::Odometry> (gpsTopic, 200, &mapOptimization::gpsHandler, this, ros::TransportHints().tcpNoDelay());
// 订阅来自外部闭环检测程序提供的闭环数据,本程序没有提供,这里实际没用上
subLoop = nh.subscribe<std_msgs::Float64MultiArray>("lio_loop/loop_closure_detection", 1, &mapOptimization::loopInfoHandler, this, ros::TransportHints().tcpNoDelay());
// 发布地图保存服务
srvSaveMap = nh.advertiseService("lio_sam/save_map", &mapOptimization::saveMapService, this);
// 发布闭环匹配关键帧局部map
pubHistoryKeyFrames = nh.advertise<sensor_msgs::PointCloud2>("lio_sam/mapping/icp_loop_closure_history_cloud", 1);
// 发布当前关键帧经过闭环优化后的位姿变换之后的特征点云
pubIcpKeyFrames = nh.advertise<sensor_msgs::PointCloud2>("lio_sam/mapping/icp_loop_closure_corrected_cloud", 1);
// 发布闭环边,rviz中表现为闭环帧之间的连线
pubLoopConstraintEdge = nh.advertise<visualization_msgs::MarkerArray>("/lio_sam/mapping/loop_closure_constraints", 1);
// 发布局部map的降采样平面点集合
pubRecentKeyFrames = nh.advertise<sensor_msgs::PointCloud2>("lio_sam/mapping/map_local", 1);
// 发布历史帧(累加的)的角点、平面点降采样集合
pubRecentKeyFrame = nh.advertise<sensor_msgs::PointCloud2>("lio_sam/mapping/cloud_registered", 1);
// 发布当前帧原始点云配准之后的点云
pubCloudRegisteredRaw = nh.advertise<sensor_msgs::PointCloud2>("lio_sam/mapping/cloud_registered_raw", 1);
downSizeFilterCorner.setLeafSize(mappingCornerLeafSize, mappingCornerLeafSize, mappingCornerLeafSize);
downSizeFilterSurf.setLeafSize(mappingSurfLeafSize, mappingSurfLeafSize, mappingSurfLeafSize);
downSizeFilterICP.setLeafSize(mappingSurfLeafSize, mappingSurfLeafSize, mappingSurfLeafSize);
downSizeFilterSurroundingKeyPoses.setLeafSize(surroundingKeyframeDensity, surroundingKeyframeDensity, surroundingKeyframeDensity); // for surrounding key poses of scan-to-map optimization
allocateMemory();
}
/**
* 初始化
*/
void allocateMemory()
{
cloudKeyPoses3D.reset(new pcl::PointCloud<PointType>());
cloudKeyPoses6D.reset(new pcl::PointCloud<PointTypePose>());
copy_cloudKeyPoses3D.reset(new pcl::PointCloud<PointType>());
copy_cloudKeyPoses6D.reset(new pcl::PointCloud<PointTypePose>());
kdtreeSurroundingKeyPoses.reset(new pcl::KdTreeFLANN<PointType>());
kdtreeHistoryKeyPoses.reset(new pcl::KdTreeFLANN<PointType>());
laserCloudCornerLast.reset(new pcl::PointCloud<PointType>()); // corner feature set from odoOptimization
laserCloudSurfLast.reset(new pcl::PointCloud<PointType>()); // surf feature set from odoOptimization
laserCloudCornerLastDS.reset(new pcl::PointCloud<PointType>()); // downsampled corner featuer set from odoOptimization
laserCloudSurfLastDS.reset(new pcl::PointCloud<PointType>()); // downsampled surf featuer set from odoOptimization
laserCloudOri.reset(new pcl::PointCloud<PointType>());
coeffSel.reset(new pcl::PointCloud<PointType>());
laserCloudOriCornerVec.resize(N_SCAN * Horizon_SCAN);
coeffSelCornerVec.resize(N_SCAN * Horizon_SCAN);
laserCloudOriCornerFlag.resize(N_SCAN * Horizon_SCAN);
laserCloudOriSurfVec.resize(N_SCAN * Horizon_SCAN);
coeffSelSurfVec.resize(N_SCAN * Horizon_SCAN);
laserCloudOriSurfFlag.resize(N_SCAN * Horizon_SCAN);
std::fill(laserCloudOriCornerFlag.begin(), laserCloudOriCornerFlag.end(), false);
std::fill(laserCloudOriSurfFlag.begin(), laserCloudOriSurfFlag.end(), false);
laserCloudCornerFromMap.reset(new pcl::PointCloud<PointType>());
laserCloudSurfFromMap.reset(new pcl::PointCloud<PointType>());
laserCloudCornerFromMapDS.reset(new pcl::PointCloud<PointType>());
laserCloudSurfFromMapDS.reset(new pcl::PointCloud<PointType>());
kdtreeCornerFromMap.reset(new pcl::KdTreeFLANN<PointType>());
kdtreeSurfFromMap.reset(new pcl::KdTreeFLANN<PointType>());
for (int i = 0; i < 6; ++i){
transformTobeMapped[i] = 0;
}
matP = cv::Mat(6, 6, CV_32F, cv::Scalar::all(0));
}
/**
* 订阅当前激光帧点云信息,来自featureExtraction
* 1、当前帧位姿初始化
* 1) 如果是第一帧,用原始imu数据的RPY初始化当前帧位姿(旋转部分)
* 2) 后续帧,用imu里程计计算两帧之间的增量位姿变换,作用于前一帧的激光位姿,得到当前帧激光位姿
* 2、提取局部角点、平面点云集合,加入局部map
* 1) 对最近的一帧关键帧,搜索时空维度上相邻的关键帧集合,降采样一下
* 2) 对关键帧集合中的每一帧,提取对应的角点、平面点,加入局部map中
* 3、当前激光帧角点、平面点集合降采样
* 4、scan-to-map优化当前帧位姿
* (1) 要求当前帧特征点数量足够多,且匹配的点数够多,才执行优化
* (2) 迭代30次(上限)优化
* 1) 当前激光帧角点寻找局部map匹配点
* a.更新当前帧位姿,将当前帧角点坐标变换到map系下,在局部map中查找5个最近点,距离小于1m,且5个点构成直线(用距离中心点的协方差矩阵,特征值进行判断),则认为匹配上了
* b.计算当前帧角点到直线的距离、垂线的单位向量,存储为角点参数
* 2) 当前激光帧平面点寻找局部map匹配点
* a.更新当前帧位姿,将当前帧平面点坐标变换到map系下,在局部map中查找5个最近点,距离小于1m,且5个点构成平面(最小二乘拟合平面),则认为匹配上了
* b.计算当前帧平面点到平面的距离、垂线的单位向量,存储为平面点参数
* 3) 提取当前帧中与局部map匹配上了的角点、平面点,加入同一集合
* 4) 对匹配特征点计算Jacobian矩阵,观测值为特征点到直线、平面的距离,构建高斯牛顿方程,迭代优化当前位姿,存transformTobeMapped
* (3)用imu原始RPY数据与scan-to-map优化后的位姿进行加权融合,更新当前帧位姿的roll、pitch,约束z坐标
* 5、设置当前帧为关键帧并执行因子图优化
* 1) 计算当前帧与前一帧位姿变换,如果变化太小,不设为关键帧,反之设为关键帧
* 2) 添加激光里程计因子、GPS因子、闭环因子
* 3) 执行因子图优化
* 4) 得到当前帧优化后位姿,位姿协方差
* 5) 添加cloudKeyPoses3D,cloudKeyPoses6D,更新transformTobeMapped,添加当前关键帧的角点、平面点集合
* 6、更新因子图中所有变量节点的位姿,也就是所有历史关键帧的位姿,更新里程计轨迹
* 7、发布激光里程计
* 8、发布里程计、点云、轨迹
*/
void laserCloudInfoHandler(const lio_sam::cloud_infoConstPtr& msgIn)
{
// 当前激光帧时间戳
timeLaserInfoStamp = msgIn->header.stamp;
timeLaserInfoCur = msgIn->header.stamp.toSec();
// 提取当前激光帧角点、平面点集合
cloudInfo = *msgIn;
pcl::fromROSMsg(msgIn->cloud_corner, *laserCloudCornerLast);
pcl::fromROSMsg(msgIn->cloud_surface, *laserCloudSurfLast);
std::lock_guard<std::mutex> lock(mtx);
// mapping执行频率控制
static double timeLastProcessing = -1;
if (timeLaserInfoCur - timeLastProcessing >= mappingProcessInterval)
{
timeLastProcessing = timeLaserInfoCur;
// 当前帧位姿初始化
// 1、如果是第一帧,用原始imu数据的RPY初始化当前帧位姿(旋转部分)
// 2、后续帧,用imu里程计计算两帧之间的增量位姿变换,作用于前一帧的激光位姿,得到当前帧激光位姿
updateInitialGuess();
// 提取局部角点、平面点云集合,加入局部map
// 1、对最近的一帧关键帧,搜索时空维度上相邻的关键帧集合,降采样一下
// 2、对关键帧集合中的每一帧,提取对应的角点、平面点,加入局部map中
extractSurroundingKeyFrames();
// 当前激光帧角点、平面点集合降采样
downsampleCurrentScan();
// scan-to-map优化当前帧位姿
// 1、要求当前帧特征点数量足够多,且匹配的点数够多,才执行优化
// 2、迭代30次(上限)优化
// 1) 当前激光帧角点寻找局部map匹配点
// a.更新当前帧位姿,将当前帧角点坐标变换到map系下,在局部map中查找5个最近点,距离小于1m,且5个点构成直线(用距离中心点的协方差矩阵,特征值进行判断),则认为匹配上了
// b.计算当前帧角点到直线的距离、垂线的单位向量,存储为角点参数
// 2) 当前激光帧平面点寻找局部map匹配点
// a.更新当前帧位姿,将当前帧平面点坐标变换到map系下,在局部map中查找5个最近点,距离小于1m,且5个点构成平面(最小二乘拟合平面),则认为匹配上了
// b.计算当前帧平面点到平面的距离、垂线的单位向量,存储为平面点参数
// 3) 提取当前帧中与局部map匹配上了的角点、平面点,加入同一集合
// 4) 对匹配特征点计算Jacobian矩阵,观测值为特征点到直线、平面的距离,构建高斯牛顿方程,迭代优化当前位姿,存transformTobeMapped
// 3、用imu原始RPY数据与scan-to-map优化后的位姿进行加权融合,更新当前帧位姿的roll、pitch,约束z坐标
scan2MapOptimization();
// 设置当前帧为关键帧并执行因子图优化
// 1、计算当前帧与前一帧位姿变换,如果变化太小,不设为关键帧,反之设为关键帧
// 2、添加激光里程计因子、GPS因子、闭环因子
// 3、执行因子图优化
// 4、得到当前帧优化后位姿,位姿协方差
// 5、添加cloudKeyPoses3D,cloudKeyPoses6D,更新transformTobeMapped,添加当前关键帧的角点、平面点集合
saveKeyFramesAndFactor();
// 更新因子图中所有变量节点的位姿,也就是所有历史关键帧的位姿,更新里程计轨迹
correctPoses();
// 发布激光里程计
publishOdometry();
// 发布里程计、点云、轨迹
// 1、发布历史关键帧位姿集合
// 2、发布局部map的降采样平面点集合
// 3、发布历史帧(累加的)的角点、平面点降采样集合
// 4、发布里程计轨迹
publishFrames();
}
}
/**
* 订阅GPS里程计,添加到GPS里程计队列
*/
void gpsHandler(const nav_msgs::Odometry::ConstPtr& gpsMsg)
{
gpsQueue.push_back(*gpsMsg);
}
/**
* 激光坐标系下的激光点,通过激光帧位姿,变换到世界坐标系下
*/
void pointAssociateToMap(PointType const * const pi, PointType * const po)
{
po->x = transPointAssociateToMap(0,0) * pi->x + transPointAssociateToMap(0,1) * pi->y + transPointAssociateToMap(0,2) * pi->z + transPointAssociateToMap(0,3);
po->y = transPointAssociateToMap(1,0) * pi->x + transPointAssociateToMap(1,1) * pi->y + transPointAssociateToMap(1,2) * pi->z + transPointAssociateToMap(1,3);
po->z = transPointAssociateToMap(2,0) * pi->x + transPointAssociateToMap(2,1) * pi->y + transPointAssociateToMap(2,2) * pi->z + transPointAssociateToMap(2,3);
po->intensity = pi->intensity;
}
/**
* 对点云cloudIn进行变换transformIn,返回结果点云
*/
pcl::PointCloud<PointType>::Ptr transformPointCloud(pcl::PointCloud<PointType>::Ptr cloudIn, PointTypePose* transformIn)
{
pcl::PointCloud<PointType>::Ptr cloudOut(new pcl::PointCloud<PointType>());
int cloudSize = cloudIn->size();
cloudOut->resize(cloudSize);
Eigen::Affine3f transCur = pcl::getTransformation(transformIn->x, transformIn->y, transformIn->z, transformIn->roll, transformIn->pitch, transformIn->yaw);
#pragma omp parallel for num_threads(numberOfCores)
for (int i = 0; i < cloudSize; ++i)
{
const auto &pointFrom = cloudIn->points[i];
cloudOut->points[i].x = transCur(0,0) * pointFrom.x + transCur(0,1) * pointFrom.y + transCur(0,2) * pointFrom.z + transCur(0,3);
cloudOut->points[i].y = transCur(1,0) * pointFrom.x + transCur(1,1) * pointFrom.y + transCur(1,2) * pointFrom.z + transCur(1,3);
cloudOut->points[i].z = transCur(2,0) * pointFrom.x + transCur(2,1) * pointFrom.y + transCur(2,2) * pointFrom.z + transCur(2,3);
cloudOut->points[i].intensity = pointFrom.intensity;
}
return cloudOut;
}
/**
* 位姿格式变换
*/
gtsam::Pose3 pclPointTogtsamPose3(PointTypePose thisPoint)
{
return gtsam::Pose3(gtsam::Rot3::RzRyRx(double(thisPoint.roll), double(thisPoint.pitch), double(thisPoint.yaw)),
gtsam::Point3(double(thisPoint.x), double(thisPoint.y), double(thisPoint.z)));
}
/**
* 位姿格式变换
*/
gtsam::Pose3 trans2gtsamPose(float transformIn[])
{
return gtsam::Pose3(gtsam::Rot3::RzRyRx(transformIn[0], transformIn[1], transformIn[2]),
gtsam::Point3(transformIn[3], transformIn[4], transformIn[5]));
}
/**
* Eigen格式的位姿变换
*/
Eigen::Affine3f pclPointToAffine3f(PointTypePose thisPoint)
{
return pcl::getTransformation(thisPoint.x, thisPoint.y, thisPoint.z, thisPoint.roll, thisPoint.pitch, thisPoint.yaw);
}
/**
* Eigen格式的位姿变换
*/
Eigen::Affine3f trans2Affine3f(float transformIn[])
{
return pcl::getTransformation(transformIn[3], transformIn[4], transformIn[5], transformIn[0], transformIn[1], transformIn[2]);
}
/**
* 位姿格式变换
*/
PointTypePose trans2PointTypePose(float transformIn[])
{
PointTypePose thisPose6D;
thisPose6D.x = transformIn[3];
thisPose6D.y = transformIn[4];
thisPose6D.z = transformIn[5];
thisPose6D.roll = transformIn[0];
thisPose6D.pitch = transformIn[1];
thisPose6D.yaw = transformIn[2];
return thisPose6D;
}
/**
* 保存全局关键帧特征点集合
*/
bool saveMapService(lio_sam::save_mapRequest& req, lio_sam::save_mapResponse& res)
{
string saveMapDirectory;
cout << "****************************************************" << endl;
cout << "Saving map to pcd files ..." << endl;
if(req.destination.empty()) saveMapDirectory = std::getenv("HOME") + savePCDDirectory;
else saveMapDirectory = std::getenv("HOME") + req.destination;
cout << "Save destination: " << saveMapDirectory << endl;
// 这个代码太坑了!!注释掉
// int unused = system((std::string("exec rm -r ") + saveMapDirectory).c_str());
// unused = system((std::string("mkdir -p ") + saveMapDirectory).c_str());
// 保存历史关键帧位姿
pcl::io::savePCDFileBinary(saveMapDirectory + "/trajectory.pcd", *cloudKeyPoses3D);
pcl::io::savePCDFileBinary(saveMapDirectory + "/transformations.pcd", *cloudKeyPoses6D);
// 提取历史关键帧角点、平面点集合
pcl::PointCloud<PointType>::Ptr globalCornerCloud(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr globalCornerCloudDS(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr globalSurfCloud(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr globalSurfCloudDS(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr globalMapCloud(new pcl::PointCloud<PointType>());
for (int i = 0; i < (int)cloudKeyPoses3D->size(); i++) {
*globalCornerCloud += *transformPointCloud(cornerCloudKeyFrames[i], &cloudKeyPoses6D->points[i]);
*globalSurfCloud += *transformPointCloud(surfCloudKeyFrames[i], &cloudKeyPoses6D->points[i]);
cout << "\r" << std::flush << "Processing feature cloud " << i << " of " << cloudKeyPoses6D->size() << " ...";
}
if(req.resolution != 0)
{
cout << "\n\nSave resolution: " << req.resolution << endl;
// 降采样
downSizeFilterCorner.setInputCloud(globalCornerCloud);
downSizeFilterCorner.setLeafSize(req.resolution, req.resolution, req.resolution);
downSizeFilterCorner.filter(*globalCornerCloudDS);
pcl::io::savePCDFileBinary(saveMapDirectory + "/CornerMap.pcd", *globalCornerCloudDS);
// 降采样
downSizeFilterSurf.setInputCloud(globalSurfCloud);
downSizeFilterSurf.setLeafSize(req.resolution, req.resolution, req.resolution);
downSizeFilterSurf.filter(*globalSurfCloudDS);
pcl::io::savePCDFileBinary(saveMapDirectory + "/SurfMap.pcd", *globalSurfCloudDS);
}
else
{
pcl::io::savePCDFileBinary(saveMapDirectory + "/CornerMap.pcd", *globalCornerCloud);
pcl::io::savePCDFileBinary(saveMapDirectory + "/SurfMap.pcd", *globalSurfCloud);
}
// 保存到一起,全局关键帧特征点集合
*globalMapCloud += *globalCornerCloud;
*globalMapCloud += *globalSurfCloud;
int ret = pcl::io::savePCDFileBinary(saveMapDirectory + "/GlobalMap.pcd", *globalMapCloud);
res.success = ret == 0;
downSizeFilterCorner.setLeafSize(mappingCornerLeafSize, mappingCornerLeafSize, mappingCornerLeafSize);
downSizeFilterSurf.setLeafSize(mappingSurfLeafSize, mappingSurfLeafSize, mappingSurfLeafSize);
cout << "****************************************************" << endl;
cout << "Saving map to pcd files completed\n" << endl;
return true;
}
/**
* 展示线程
* 1、发布局部关键帧map的特征点云
* 2、保存全局关键帧特征点集合
*/
void visualizeGlobalMapThread()
{
ros::Rate rate(0.2);
while (ros::ok()){
rate.sleep();
// 发布局部关键帧map的特征点云
publishGlobalMap();
}
if (savePCD == false)
return;
lio_sam::save_mapRequest req;
lio_sam::save_mapResponse res;
// 保存全局关键帧特征点集合
if(!saveMapService(req, res)){
cout << "Fail to save map" << endl;
}
}
/**
* 发布局部关键帧map的特征点云
*/
void publishGlobalMap()
{
if (pubLaserCloudSurround.getNumSubscribers() == 0)
return;
if (cloudKeyPoses3D->points.empty() == true)
return;
pcl::KdTreeFLANN<PointType>::Ptr kdtreeGlobalMap(new pcl::KdTreeFLANN<PointType>());;
pcl::PointCloud<PointType>::Ptr globalMapKeyPoses(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr globalMapKeyPosesDS(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr globalMapKeyFrames(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr globalMapKeyFramesDS(new pcl::PointCloud<PointType>());
// kdtree查找最近一帧关键帧相邻的关键帧集合
std::vector<int> pointSearchIndGlobalMap;
std::vector<float> pointSearchSqDisGlobalMap;
mtx.lock();
kdtreeGlobalMap->setInputCloud(cloudKeyPoses3D);
kdtreeGlobalMap->radiusSearch(cloudKeyPoses3D->back(), globalMapVisualizationSearchRadius, pointSearchIndGlobalMap, pointSearchSqDisGlobalMap, 0);
mtx.unlock();
for (int i = 0; i < (int)pointSearchIndGlobalMap.size(); ++i)
globalMapKeyPoses->push_back(cloudKeyPoses3D->points[pointSearchIndGlobalMap[i]]);
// 降采样
pcl::VoxelGrid<PointType> downSizeFilterGlobalMapKeyPoses;
downSizeFilterGlobalMapKeyPoses.setLeafSize(globalMapVisualizationPoseDensity, globalMapVisualizationPoseDensity, globalMapVisualizationPoseDensity); // for global map visualization
downSizeFilterGlobalMapKeyPoses.setInputCloud(globalMapKeyPoses);
downSizeFilterGlobalMapKeyPoses.filter(*globalMapKeyPosesDS);
// 提取局部相邻关键帧对应的特征点云
for (int i = 0; i < (int)globalMapKeyPosesDS->size(); ++i){
// 距离过大
if (pointDistance(globalMapKeyPosesDS->points[i], cloudKeyPoses3D->back()) > globalMapVisualizationSearchRadius)
continue;
int thisKeyInd = (int)globalMapKeyPosesDS->points[i].intensity;
*globalMapKeyFrames += *transformPointCloud(cornerCloudKeyFrames[thisKeyInd], &cloudKeyPoses6D->points[thisKeyInd]);
*globalMapKeyFrames += *transformPointCloud(surfCloudKeyFrames[thisKeyInd], &cloudKeyPoses6D->points[thisKeyInd]);
}
// 降采样,发布
pcl::VoxelGrid<PointType> downSizeFilterGlobalMapKeyFrames; // for global map visualization
downSizeFilterGlobalMapKeyFrames.setLeafSize(globalMapVisualizationLeafSize, globalMapVisualizationLeafSize, globalMapVisualizationLeafSize); // for global map visualization
downSizeFilterGlobalMapKeyFrames.setInputCloud(globalMapKeyFrames);
downSizeFilterGlobalMapKeyFrames.filter(*globalMapKeyFramesDS);
publishCloud(&pubLaserCloudSurround, globalMapKeyFramesDS, timeLaserInfoStamp, odometryFrame);
}
/**
* 闭环线程
* 1、闭环scan-to-map,icp优化位姿
* 1) 在历史关键帧中查找与当前关键帧距离最近的关键帧集合,选择时间相隔较远的一帧作为候选闭环帧
* 2) 提取当前关键帧特征点集合,降采样;提取闭环匹配关键帧前后相邻若干帧的关键帧特征点集合,降采样
* 3) 执行scan-to-map优化,调用icp方法,得到优化后位姿,构造闭环因子需要的数据,在因子图优化中一并加入更新位姿
* 2、rviz展示闭环边
*/
void loopClosureThread()
{
if (loopClosureEnableFlag == false)
return;
ros::Rate rate(loopClosureFrequency);
while (ros::ok())
{
rate.sleep();
// 闭环scan-to-map,icp优化位姿
// 1、在历史关键帧中查找与当前关键帧距离最近的关键帧集合,选择时间相隔较远的一帧作为候选闭环帧
// 2、提取当前关键帧特征点集合,降采样;提取闭环匹配关键帧前后相邻若干帧的关键帧特征点集合,降采样
// 3、执行scan-to-map优化,调用icp方法,得到优化后位姿,构造闭环因子需要的数据,在因子图优化中一并加入更新位姿
// 注:闭环的时候没有立即更新当前帧的位姿,而是添加闭环因子,让图优化去更新位姿
performLoopClosure();
// rviz展示闭环边
visualizeLoopClosure();
}
}
/**
* 订阅来自外部闭环检测程序提供的闭环数据,本程序没有提供,这里实际没用上
*/
void loopInfoHandler(const std_msgs::Float64MultiArray::ConstPtr& loopMsg)
{
std::lock_guard<std::mutex> lock(mtxLoopInfo);
if (loopMsg->data.size() != 2)
return;
loopInfoVec.push_back(*loopMsg);
while (loopInfoVec.size() > 5)
loopInfoVec.pop_front();
}
/**
* 闭环scan-to-map,icp优化位姿
* 1、在历史关键帧中查找与当前关键帧距离最近的关键帧集合,选择时间相隔较远的一帧作为候选闭环帧
* 2、提取当前关键帧特征点集合,降采样;提取闭环匹配关键帧前后相邻若干帧的关键帧特征点集合,降采样
* 3、执行scan-to-map优化,调用icp方法,得到优化后位姿,构造闭环因子需要的数据,在因子图优化中一并加入更新位姿
* 注:闭环的时候没有立即更新当前帧的位姿,而是添加闭环因子,让图优化去更新位姿
*/
void performLoopClosure()
{
if (cloudKeyPoses3D->points.empty() == true)
return;
mtx.lock();
*copy_cloudKeyPoses3D = *cloudKeyPoses3D;
*copy_cloudKeyPoses6D = *cloudKeyPoses6D;
mtx.unlock();
// 当前关键帧索引,候选闭环匹配帧索引
int loopKeyCur;
int loopKeyPre;
// not-used
if (detectLoopClosureExternal(&loopKeyCur, &loopKeyPre) == false)
// 在历史关键帧中查找与当前关键帧距离最近的关键帧集合,选择时间相隔较远的一帧作为候选闭环帧
if (detectLoopClosureDistance(&loopKeyCur, &loopKeyPre) == false)
return;
// 提取
pcl::PointCloud<PointType>::Ptr cureKeyframeCloud(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr prevKeyframeCloud(new pcl::PointCloud<PointType>());
{
// 提取当前关键帧特征点集合,降采样
loopFindNearKeyframes(cureKeyframeCloud, loopKeyCur, 0);
// 提取闭环匹配关键帧前后相邻若干帧的关键帧特征点集合,降采样
loopFindNearKeyframes(prevKeyframeCloud, loopKeyPre, historyKeyframeSearchNum);
// 如果特征点较少,返回
if (cureKeyframeCloud->size() < 300 || prevKeyframeCloud->size() < 1000)
return;
// 发布闭环匹配关键帧局部map
if (pubHistoryKeyFrames.getNumSubscribers() != 0)
publishCloud(&pubHistoryKeyFrames, prevKeyframeCloud, timeLaserInfoStamp, odometryFrame);
}
// ICP参数设置
static pcl::IterativeClosestPoint<PointType, PointType> icp;
icp.setMaxCorrespondenceDistance(historyKeyframeSearchRadius*2);
icp.setMaximumIterations(100);
icp.setTransformationEpsilon(1e-6);
icp.setEuclideanFitnessEpsilon(1e-6);
icp.setRANSACIterations(0);
// scan-to-map,调用icp匹配
icp.setInputSource(cureKeyframeCloud);
icp.setInputTarget(prevKeyframeCloud);
pcl::PointCloud<PointType>::Ptr unused_result(new pcl::PointCloud<PointType>());
icp.align(*unused_result);
// 未收敛,或者匹配不够好
if (icp.hasConverged() == false || icp.getFitnessScore() > historyKeyframeFitnessScore)
return;
// 发布当前关键帧经过闭环优化后的位姿变换之后的特征点云
if (pubIcpKeyFrames.getNumSubscribers() != 0)
{
pcl::PointCloud<PointType>::Ptr closed_cloud(new pcl::PointCloud<PointType>());
pcl::transformPointCloud(*cureKeyframeCloud, *closed_cloud, icp.getFinalTransformation());
publishCloud(&pubIcpKeyFrames, closed_cloud, timeLaserInfoStamp, odometryFrame);
}
// 闭环优化得到的当前关键帧与闭环关键帧之间的位姿变换
float x, y, z, roll, pitch, yaw;
Eigen::Affine3f correctionLidarFrame;
correctionLidarFrame = icp.getFinalTransformation();
// 闭环优化前当前帧位姿
Eigen::Affine3f tWrong = pclPointToAffine3f(copy_cloudKeyPoses6D->points[loopKeyCur]);
// 闭环优化后当前帧位姿
Eigen::Affine3f tCorrect = correctionLidarFrame * tWrong;
pcl::getTranslationAndEulerAngles (tCorrect, x, y, z, roll, pitch, yaw);
gtsam::Pose3 poseFrom = Pose3(Rot3::RzRyRx(roll, pitch, yaw), Point3(x, y, z));
// 闭环匹配帧的位姿
gtsam::Pose3 poseTo = pclPointTogtsamPose3(copy_cloudKeyPoses6D->points[loopKeyPre]);
gtsam::Vector Vector6(6);
float noiseScore = icp.getFitnessScore();
Vector6 << noiseScore, noiseScore, noiseScore, noiseScore, noiseScore, noiseScore;
noiseModel::Diagonal::shared_ptr constraintNoise = noiseModel::Diagonal::Variances(Vector6);
// 添加闭环因子需要的数据
mtx.lock();
loopIndexQueue.push_back(make_pair(loopKeyCur, loopKeyPre));
loopPoseQueue.push_back(poseFrom.between(poseTo));
loopNoiseQueue.push_back(constraintNoise);
mtx.unlock();
loopIndexContainer[loopKeyCur] = loopKeyPre;
}
/**
* 在历史关键帧中查找与当前关键帧距离最近的关键帧集合,选择时间相隔较远的一帧作为候选闭环帧
*/
bool detectLoopClosureDistance(int *latestID, int *closestID)
{
// 当前关键帧帧
int loopKeyCur = copy_cloudKeyPoses3D->size() - 1;
int loopKeyPre = -1;
// 当前帧已经添加过闭环对应关系,不再继续添加
auto it = loopIndexContainer.find(loopKeyCur);
if (it != loopIndexContainer.end())
return false;
// 在历史关键帧中查找与当前关键帧距离最近的关键帧集合
std::vector<int> pointSearchIndLoop;
std::vector<float> pointSearchSqDisLoop;
kdtreeHistoryKeyPoses->setInputCloud(copy_cloudKeyPoses3D);
kdtreeHistoryKeyPoses->radiusSearch(copy_cloudKeyPoses3D->back(), historyKeyframeSearchRadius, pointSearchIndLoop, pointSearchSqDisLoop, 0);
// 在候选关键帧集合中,找到与当前帧时间相隔较远的帧,设为候选匹配帧
for (int i = 0; i < (int)pointSearchIndLoop.size(); ++i)
{
int id = pointSearchIndLoop[i];
if (abs(copy_cloudKeyPoses6D->points[id].time - timeLaserInfoCur) > historyKeyframeSearchTimeDiff)
{
loopKeyPre = id;
break;
}
}
if (loopKeyPre == -1 || loopKeyCur == loopKeyPre)
return false;
*latestID = loopKeyCur;
*closestID = loopKeyPre;
return true;
}
/**
* not-used, 来自外部闭环检测程序提供的闭环匹配索引对
*/
bool detectLoopClosureExternal(int *latestID, int *closestID)
{
// this function is not used yet, please ignore it
int loopKeyCur = -1;
int loopKeyPre = -1;
std::lock_guard<std::mutex> lock(mtxLoopInfo);
if (loopInfoVec.empty())
return false;
double loopTimeCur = loopInfoVec.front().data[0];
double loopTimePre = loopInfoVec.front().data[1];
loopInfoVec.pop_front();
if (abs(loopTimeCur - loopTimePre) < historyKeyframeSearchTimeDiff)
return false;
int cloudSize = copy_cloudKeyPoses6D->size();
if (cloudSize < 2)
return false;
// latest key
loopKeyCur = cloudSize - 1;
for (int i = cloudSize - 1; i >= 0; --i)
{
if (copy_cloudKeyPoses6D->points[i].time >= loopTimeCur)
loopKeyCur = round(copy_cloudKeyPoses6D->points[i].intensity);
else
break;
}
// previous key
loopKeyPre = 0;
for (int i = 0; i < cloudSize; ++i)
{
if (copy_cloudKeyPoses6D->points[i].time <= loopTimePre)
loopKeyPre = round(copy_cloudKeyPoses6D->points[i].intensity);
else
break;
}
if (loopKeyCur == loopKeyPre)
return false;
auto it = loopIndexContainer.find(loopKeyCur);
if (it != loopIndexContainer.end())
return false;
*latestID = loopKeyCur;
*closestID = loopKeyPre;
return true;
}
/**
* 提取key索引的关键帧前后相邻若干帧的关键帧特征点集合,降采样
*/
void loopFindNearKeyframes(pcl::PointCloud<PointType>::Ptr& nearKeyframes, const int& key, const int& searchNum)
{
// 提取key索引的关键帧前后相邻若干帧的关键帧特征点集合
nearKeyframes->clear();
int cloudSize = copy_cloudKeyPoses6D->size();
for (int i = -searchNum; i <= searchNum; ++i)
{
int keyNear = key + i;
if (keyNear < 0 || keyNear >= cloudSize )
continue;
*nearKeyframes += *transformPointCloud(cornerCloudKeyFrames[keyNear], ©_cloudKeyPoses6D->points[keyNear]);
*nearKeyframes += *transformPointCloud(surfCloudKeyFrames[keyNear], ©_cloudKeyPoses6D->points[keyNear]);
}
if (nearKeyframes->empty())
return;
// 降采样
pcl::PointCloud<PointType>::Ptr cloud_temp(new pcl::PointCloud<PointType>());
downSizeFilterICP.setInputCloud(nearKeyframes);
downSizeFilterICP.filter(*cloud_temp);
*nearKeyframes = *cloud_temp;
}
/**
* rviz展示闭环边
*/
void visualizeLoopClosure()
{
if (loopIndexContainer.empty())
return;
visualization_msgs::MarkerArray markerArray;
// 闭环顶点
visualization_msgs::Marker markerNode;
markerNode.header.frame_id = odometryFrame;
markerNode.header.stamp = timeLaserInfoStamp;
markerNode.action = visualization_msgs::Marker::ADD;
markerNode.type = visualization_msgs::Marker::SPHERE_LIST;
markerNode.ns = "loop_nodes";
markerNode.id = 0;
markerNode.pose.orientation.w = 1;
markerNode.scale.x = 0.3; markerNode.scale.y = 0.3; markerNode.scale.z = 0.3;
markerNode.color.r = 0; markerNode.color.g = 0.8; markerNode.color.b = 1;
markerNode.color.a = 1;
// 闭环边
visualization_msgs::Marker markerEdge;
markerEdge.header.frame_id = odometryFrame;
markerEdge.header.stamp = timeLaserInfoStamp;
markerEdge.action = visualization_msgs::Marker::ADD;
markerEdge.type = visualization_msgs::Marker::LINE_LIST;
markerEdge.ns = "loop_edges";
markerEdge.id = 1;
markerEdge.pose.orientation.w = 1;
markerEdge.scale.x = 0.1;
markerEdge.color.r = 0.9; markerEdge.color.g = 0.9; markerEdge.color.b = 0;
markerEdge.color.a = 1;
// 遍历闭环
for (auto it = loopIndexContainer.begin(); it != loopIndexContainer.end(); ++it)
{
int key_cur = it->first;
int key_pre = it->second;
geometry_msgs::Point p;
p.x = copy_cloudKeyPoses6D->points[key_cur].x;
p.y = copy_cloudKeyPoses6D->points[key_cur].y;
p.z = copy_cloudKeyPoses6D->points[key_cur].z;
markerNode.points.push_back(p);
markerEdge.points.push_back(p);
p.x = copy_cloudKeyPoses6D->points[key_pre].x;
p.y = copy_cloudKeyPoses6D->points[key_pre].y;
p.z = copy_cloudKeyPoses6D->points[key_pre].z;
markerNode.points.push_back(p);
markerEdge.points.push_back(p);
}
markerArray.markers.push_back(markerNode);
markerArray.markers.push_back(markerEdge);
pubLoopConstraintEdge.publish(markerArray);
}
/**
* 当前帧位姿初始化
* 1、如果是第一帧,用原始imu数据的RPY初始化当前帧位姿(旋转部分)
* 2、后续帧,用imu里程计计算两帧之间的增量位姿变换,作用于前一帧的激光位姿,得到当前帧激光位姿
*/
void updateInitialGuess()
{
// 前一帧的位姿,注:这里指lidar的位姿,后面都简写成位姿
incrementalOdometryAffineFront = trans2Affine3f(transformTobeMapped);
// 前一帧的初始化姿态角(来自原始imu数据),用于估计第一帧的位姿(旋转部分)
static Eigen::Affine3f lastImuTransformation;
// 如果关键帧集合为空,继续进行初始化
if (cloudKeyPoses3D->points.empty())
{
// 当前帧位姿的旋转部分,用激光帧信息中的RPY(来自imu原始数据)初始化
transformTobeMapped[0] = cloudInfo.imuRollInit;
transformTobeMapped[1] = cloudInfo.imuPitchInit;
transformTobeMapped[2] = cloudInfo.imuYawInit;
if (!useImuHeadingInitialization)
transformTobeMapped[2] = 0;
lastImuTransformation = pcl::getTransformation(0, 0, 0, cloudInfo.imuRollInit, cloudInfo.imuPitchInit, cloudInfo.imuYawInit);
return;
}
// 用当前帧和前一帧对应的imu里程计计算相对位姿变换,再用前一帧的位姿与相对变换,计算当前帧的位姿,存transformTobeMapped
static bool lastImuPreTransAvailable = false;
static Eigen::Affine3f lastImuPreTransformation;
if (cloudInfo.odomAvailable == true)
{
// 当前帧的初始估计位姿(来自imu里程计),后面用来计算增量位姿变换
Eigen::Affine3f transBack = pcl::getTransformation(cloudInfo.initialGuessX, cloudInfo.initialGuessY, cloudInfo.initialGuessZ,
cloudInfo.initialGuessRoll, cloudInfo.initialGuessPitch, cloudInfo.initialGuessYaw);
if (lastImuPreTransAvailable == false)
{
// 赋值给前一帧
lastImuPreTransformation = transBack;
lastImuPreTransAvailable = true;
} else {
// 当前帧相对于前一帧的位姿变换,imu里程计计算得到
Eigen::Affine3f transIncre = lastImuPreTransformation.inverse() * transBack;
// 前一帧的位姿
Eigen::Affine3f transTobe = trans2Affine3f(transformTobeMapped);
// 当前帧的位姿
Eigen::Affine3f transFinal = transTobe * transIncre;
// 更新当前帧位姿transformTobeMapped
pcl::getTranslationAndEulerAngles(transFinal, transformTobeMapped[3], transformTobeMapped[4], transformTobeMapped[5],
transformTobeMapped[0], transformTobeMapped[1], transformTobeMapped[2]);
// 赋值给前一帧
lastImuPreTransformation = transBack;
lastImuTransformation = pcl::getTransformation(0, 0, 0, cloudInfo.imuRollInit, cloudInfo.imuPitchInit, cloudInfo.imuYawInit); // save imu before return;
return;
}
}
// 只在第一帧调用(注意上面的return),用imu数据初始化当前帧位姿,仅初始化旋转部分
if (cloudInfo.imuAvailable == true)
{
// 当前帧的姿态角(来自原始imu数据)
Eigen::Affine3f transBack = pcl::getTransformation(0, 0, 0, cloudInfo.imuRollInit, cloudInfo.imuPitchInit, cloudInfo.imuYawInit);
// 当前帧相对于前一帧的姿态变换
Eigen::Affine3f transIncre = lastImuTransformation.inverse() * transBack;
// 前一帧的位姿
Eigen::Affine3f transTobe = trans2Affine3f(transformTobeMapped);
// 当前帧的位姿
Eigen::Affine3f transFinal = transTobe * transIncre;
// 更新当前帧位姿transformTobeMapped
pcl::getTranslationAndEulerAngles(transFinal, transformTobeMapped[3], transformTobeMapped[4], transformTobeMapped[5],
transformTobeMapped[0], transformTobeMapped[1], transformTobeMapped[2]);
lastImuTransformation = pcl::getTransformation(0, 0, 0, cloudInfo.imuRollInit, cloudInfo.imuPitchInit, cloudInfo.imuYawInit); // save imu before return;
return;
}
}
/**
* not-used
*/
void extractForLoopClosure()
{
pcl::PointCloud<PointType>::Ptr cloudToExtract(new pcl::PointCloud<PointType>());
//
int numPoses = cloudKeyPoses3D->size();
for (int i = numPoses-1; i >= 0; --i)
{
if ((int)cloudToExtract->size() <= surroundingKeyframeSize)
cloudToExtract->push_back(cloudKeyPoses3D->points[i]);
else
break;
}
// 将相邻关键帧集合对应的角点、平面点,加入到局部map中,作为scan-to-map匹配的局部点云地图
extractCloud(cloudToExtract);
}
/**
* 提取局部角点、平面点云集合,加入局部map
* 1、对最近的一帧关键帧,搜索时空维度上相邻的关键帧集合,降采样一下
* 2、对关键帧集合中的每一帧,提取对应的角点、平面点,加入局部map中
*/
void extractNearby()
{
pcl::PointCloud<PointType>::Ptr surroundingKeyPoses(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr surroundingKeyPosesDS(new pcl::PointCloud<PointType>());
std::vector<int> pointSearchInd;
std::vector<float> pointSearchSqDis;
// kdtree的输入,全局关键帧位姿集合(历史所有关键帧集合)
kdtreeSurroundingKeyPoses->setInputCloud(cloudKeyPoses3D);
// 对最近的一帧关键帧,在半径区域内搜索空间区域上相邻的关键帧集合
kdtreeSurroundingKeyPoses->radiusSearch(cloudKeyPoses3D->back(), (double)surroundingKeyframeSearchRadius, pointSearchInd, pointSearchSqDis);
// 遍历搜索结果,pointSearchInd存的是结果在cloudKeyPoses3D下面的索引
for (int i = 0; i < (int)pointSearchInd.size(); ++i)
{
int id = pointSearchInd[i];
// 加入相邻关键帧位姿集合中
surroundingKeyPoses->push_back(cloudKeyPoses3D->points[id]);
}
// 降采样一下
downSizeFilterSurroundingKeyPoses.setInputCloud(surroundingKeyPoses);
downSizeFilterSurroundingKeyPoses.filter(*surroundingKeyPosesDS);
// 加入时间上相邻的一些关键帧,比如当载体在原地转圈,这些帧加进来是合理的
int numPoses = cloudKeyPoses3D->size();
for (int i = numPoses-1; i >= 0; --i)
{
if (timeLaserInfoCur - cloudKeyPoses6D->points[i].time < 10.0)
surroundingKeyPosesDS->push_back(cloudKeyPoses3D->points[i]);
else
break;
}
// 将相邻关键帧集合对应的角点、平面点,加入到局部map中,作为scan-to-map匹配的局部点云地图
extractCloud(surroundingKeyPosesDS);
}
/**
* 将相邻关键帧集合对应的角点、平面点,加入到局部map中,作为scan-to-map匹配的局部点云地图
*/
void extractCloud(pcl::PointCloud<PointType>::Ptr cloudToExtract)
{
// 相邻关键帧集合对应的角点、平面点,加入到局部map中;注:称之为局部map,后面进行scan-to-map匹配,所用到的map就是这里的相邻关键帧对应点云集合
laserCloudCornerFromMap->clear();
laserCloudSurfFromMap->clear();
// 遍历当前帧(实际是取最近的一个关键帧来找它相邻的关键帧集合)时空维度上相邻的关键帧集合
for (int i = 0; i < (int)cloudToExtract->size(); ++i)
{
// 距离超过阈值,丢弃
if (pointDistance(cloudToExtract->points[i], cloudKeyPoses3D->back()) > surroundingKeyframeSearchRadius)
continue;
// 相邻关键帧索引
int thisKeyInd = (int)cloudToExtract->points[i].intensity;
if (laserCloudMapContainer.find(thisKeyInd) != laserCloudMapContainer.end())
{
*laserCloudCornerFromMap += laserCloudMapContainer[thisKeyInd].first;
*laserCloudSurfFromMap += laserCloudMapContainer[thisKeyInd].second;
} else {
// 相邻关键帧对应的角点、平面点云,通过6D位姿变换到世界坐标系下
pcl::PointCloud<PointType> laserCloudCornerTemp = *transformPointCloud(cornerCloudKeyFrames[thisKeyInd], &cloudKeyPoses6D->points[thisKeyInd]);
pcl::PointCloud<PointType> laserCloudSurfTemp = *transformPointCloud(surfCloudKeyFrames[thisKeyInd], &cloudKeyPoses6D->points[thisKeyInd]);
// 加入局部map
*laserCloudCornerFromMap += laserCloudCornerTemp;
*laserCloudSurfFromMap += laserCloudSurfTemp;
laserCloudMapContainer[thisKeyInd] = make_pair(laserCloudCornerTemp, laserCloudSurfTemp);
}
}
// 降采样局部角点map
downSizeFilterCorner.setInputCloud(laserCloudCornerFromMap);
downSizeFilterCorner.filter(*laserCloudCornerFromMapDS);
laserCloudCornerFromMapDSNum = laserCloudCornerFromMapDS->size();
// 降采样局部平面点map
downSizeFilterSurf.setInputCloud(laserCloudSurfFromMap);
downSizeFilterSurf.filter(*laserCloudSurfFromMapDS);
laserCloudSurfFromMapDSNum = laserCloudSurfFromMapDS->size();
// 太大了,清空一下内存
if (laserCloudMapContainer.size() > 1000)
laserCloudMapContainer.clear();
}
/**
* 提取局部角点、平面点云集合,加入局部map
* 1、对最近的一帧关键帧,搜索时空维度上相邻的关键帧集合,降采样一下
* 2、对关键帧集合中的每一帧,提取对应的角点、平面点,加入局部map中
*/
void extractSurroundingKeyFrames()
{
if (cloudKeyPoses3D->points.empty() == true)
return;
// if (loopClosureEnableFlag == true)
// {
// extractForLoopClosure();
// } else {
// extractNearby();
// }
// 提取局部角点、平面点云集合,加入局部map
// 1、对最近的一帧关键帧,搜索时空维度上相邻的关键帧集合,降采样一下
// 2、对关键帧集合中的每一帧,提取对应的角点、平面点,加入局部map中
extractNearby();
}
/**
* 当前激光帧角点、平面点集合降采样
*/
void downsampleCurrentScan()
{
// 当前激光帧角点集合降采样
laserCloudCornerLastDS->clear();
downSizeFilterCorner.setInputCloud(laserCloudCornerLast);
downSizeFilterCorner.filter(*laserCloudCornerLastDS);
laserCloudCornerLastDSNum = laserCloudCornerLastDS->size();
// 当前激光帧平面点集合降采样
laserCloudSurfLastDS->clear();
downSizeFilterSurf.setInputCloud(laserCloudSurfLast);
downSizeFilterSurf.filter(*laserCloudSurfLastDS);
laserCloudSurfLastDSNum = laserCloudSurfLastDS->size();
}
/**
* 更新当前帧位姿
*/
void updatePointAssociateToMap()
{
transPointAssociateToMap = trans2Affine3f(transformTobeMapped);
}
/**
* 当前激光帧角点寻找局部map匹配点
* 1、更新当前帧位姿,将当前帧角点坐标变换到map系下,在局部map中查找5个最近点,距离小于1m,且5个点构成直线(用距离中心点的协方差矩阵,特征值进行判断),则认为匹配上了
* 2、计算当前帧角点到直线的距离、垂线的单位向量,存储为角点参数
*/
void cornerOptimization()
{
// 更新当前帧位姿
updatePointAssociateToMap();
// 遍历当前帧角点集合
#pragma omp parallel for num_threads(numberOfCores)
for (int i = 0; i < laserCloudCornerLastDSNum; i++)
{
PointType pointOri, pointSel, coeff;
std::vector<int> pointSearchInd;
std::vector<float> pointSearchSqDis;
// 角点(坐标还是lidar系)
pointOri = laserCloudCornerLastDS->points[i];
// 根据当前帧位姿,变换到世界坐标系(map系)下
pointAssociateToMap(&pointOri, &pointSel);
// 在局部角点map中查找当前角点相邻的5个角点
kdtreeCornerFromMap->nearestKSearch(pointSel, 5, pointSearchInd, pointSearchSqDis);
cv::Mat matA1(3, 3, CV_32F, cv::Scalar::all(0));
cv::Mat matD1(1, 3, CV_32F, cv::Scalar::all(0));
cv::Mat matV1(3, 3, CV_32F, cv::Scalar::all(0));
// 要求距离都小于1m
if (pointSearchSqDis[4] < 1.0) {
// 计算5个点的均值坐标,记为中心点
float cx = 0, cy = 0, cz = 0;
for (int j = 0; j < 5; j++) {
cx += laserCloudCornerFromMapDS->points[pointSearchInd[j]].x;
cy += laserCloudCornerFromMapDS->points[pointSearchInd[j]].y;
cz += laserCloudCornerFromMapDS->points[pointSearchInd[j]].z;
}
cx /= 5; cy /= 5; cz /= 5;
// 计算协方差
float a11 = 0, a12 = 0, a13 = 0, a22 = 0, a23 = 0, a33 = 0;
for (int j = 0; j < 5; j++) {
// 计算点与中心点之间的距离
float ax = laserCloudCornerFromMapDS->points[pointSearchInd[j]].x - cx;
float ay = laserCloudCornerFromMapDS->points[pointSearchInd[j]].y - cy;
float az = laserCloudCornerFromMapDS->points[pointSearchInd[j]].z - cz;
a11 += ax * ax; a12 += ax * ay; a13 += ax * az;
a22 += ay * ay; a23 += ay * az;
a33 += az * az;
}
a11 /= 5; a12 /= 5; a13 /= 5; a22 /= 5; a23 /= 5; a33 /= 5;
// 构建协方差矩阵
matA1.at<float>(0, 0) = a11; matA1.at<float>(0, 1) = a12; matA1.at<float>(0, 2) = a13;
matA1.at<float>(1, 0) = a12; matA1.at<float>(1, 1) = a22; matA1.at<float>(1, 2) = a23;
matA1.at<float>(2, 0) = a13; matA1.at<float>(2, 1) = a23; matA1.at<float>(2, 2) = a33;
// 特征值分解
cv::eigen(matA1, matD1, matV1);
// 如果最大的特征值相比次大特征值,大很多,认为构成了线,角点是合格的
if (matD1.at<float>(0, 0) > 3 * matD1.at<float>(0, 1)) {
// 当前帧角点坐标(map系下)
float x0 = pointSel.x;
float y0 = pointSel.y;
float z0 = pointSel.z;
// 局部map对应中心角点,沿着特征向量(直线方向)方向,前后各取一个点
float x1 = cx + 0.1 * matV1.at<float>(0, 0);
float y1 = cy + 0.1 * matV1.at<float>(0, 1);
float z1 = cz + 0.1 * matV1.at<float>(0, 2);
float x2 = cx - 0.1 * matV1.at<float>(0, 0);
float y2 = cy - 0.1 * matV1.at<float>(0, 1);
float z2 = cz - 0.1 * matV1.at<float>(0, 2);
// area_012,也就是三个点组成的三角形面积*2,叉积的模|axb|=a*b*sin(theta)
float a012 = sqrt(((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1)) * ((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
+ ((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1)) * ((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))
+ ((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1)) * ((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1)));
// line_12,底边边长
float l12 = sqrt((x1 - x2)*(x1 - x2) + (y1 - y2)*(y1 - y2) + (z1 - z2)*(z1 - z2));
// 两次叉积,得到点到直线的垂线段单位向量,x分量,下面同理
float la = ((y1 - y2)*((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
+ (z1 - z2)*((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))) / a012 / l12;
float lb = -((x1 - x2)*((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
- (z1 - z2)*((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1))) / a012 / l12;
float lc = -((x1 - x2)*((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))
+ (y1 - y2)*((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1))) / a012 / l12;
// 三角形的高,也就是点到直线距离
float ld2 = a012 / l12;
// 距离越大,s越小,是个距离惩罚因子(权重)
float s = 1 - 0.9 * fabs(ld2);
// 点到直线的垂线段单位向量
coeff.x = s * la;
coeff.y = s * lb;
coeff.z = s * lc;
// 点到直线距离
coeff.intensity = s * ld2;
if (s > 0.1) {
// 当前激光帧角点,加入匹配集合中
laserCloudOriCornerVec[i] = pointOri;
// 角点的参数
coeffSelCornerVec[i] = coeff;
laserCloudOriCornerFlag[i] = true;
}
}
}
}
}
/**
* 当前激光帧平面点寻找局部map匹配点
* 1、更新当前帧位姿,将当前帧平面点坐标变换到map系下,在局部map中查找5个最近点,距离小于1m,且5个点构成平面(最小二乘拟合平面),则认为匹配上了
* 2、计算当前帧平面点到平面的距离、垂线的单位向量,存储为平面点参数
*/
void surfOptimization()
{
// 更新当前帧位姿
updatePointAssociateToMap();
// 遍历当前帧平面点集合
#pragma omp parallel for num_threads(numberOfCores)
for (int i = 0; i < laserCloudSurfLastDSNum; i++)
{
PointType pointOri, pointSel, coeff;
std::vector<int> pointSearchInd;
std::vector<float> pointSearchSqDis;
// 平面点(坐标还是lidar系)
pointOri = laserCloudSurfLastDS->points[i];
// 根据当前帧位姿,变换到世界坐标系(map系)下
pointAssociateToMap(&pointOri, &pointSel);
// 在局部平面点map中查找当前平面点相邻的5个平面点
kdtreeSurfFromMap->nearestKSearch(pointSel, 5, pointSearchInd, pointSearchSqDis);
Eigen::Matrix<float, 5, 3> matA0;
Eigen::Matrix<float, 5, 1> matB0;
Eigen::Vector3f matX0;
matA0.setZero();
matB0.fill(-1);
matX0.setZero();
// 要求距离都小于1m
if (pointSearchSqDis[4] < 1.0) {
for (int j = 0; j < 5; j++) {
matA0(j, 0) = laserCloudSurfFromMapDS->points[pointSearchInd[j]].x;
matA0(j, 1) = laserCloudSurfFromMapDS->points[pointSearchInd[j]].y;
matA0(j, 2) = laserCloudSurfFromMapDS->points[pointSearchInd[j]].z;
}
// 假设平面方程为ax+by+cz+1=0,这里就是求方程的系数abc,d=1
matX0 = matA0.colPivHouseholderQr().solve(matB0);
// 平面方程的系数,也是法向量的分量
float pa = matX0(0, 0);
float pb = matX0(1, 0);
float pc = matX0(2, 0);
float pd = 1;
// 单位法向量
float ps = sqrt(pa * pa + pb * pb + pc * pc);
pa /= ps; pb /= ps; pc /= ps; pd /= ps;
// 检查平面是否合格,如果5个点中有点到平面的距离超过0.2m,那么认为这些点太分散了,不构成平面
bool planeValid = true;
for (int j = 0; j < 5; j++) {
if (fabs(pa * laserCloudSurfFromMapDS->points[pointSearchInd[j]].x +
pb * laserCloudSurfFromMapDS->points[pointSearchInd[j]].y +
pc * laserCloudSurfFromMapDS->points[pointSearchInd[j]].z + pd) > 0.2) {
planeValid = false;
break;
}
}
// 平面合格
if (planeValid) {
// 当前激光帧点到平面距离
float pd2 = pa * pointSel.x + pb * pointSel.y + pc * pointSel.z + pd;
float s = 1 - 0.9 * fabs(pd2) / sqrt(sqrt(pointSel.x * pointSel.x
+ pointSel.y * pointSel.y + pointSel.z * pointSel.z));
// 点到平面垂线单位法向量(其实等价于平面法向量)
coeff.x = s * pa;
coeff.y = s * pb;
coeff.z = s * pc;
// 点到平面距离
coeff.intensity = s * pd2;
if (s > 0.1) {
// 当前激光帧平面点,加入匹配集合中
laserCloudOriSurfVec[i] = pointOri;
// 参数
coeffSelSurfVec[i] = coeff;
laserCloudOriSurfFlag[i] = true;
}
}
}
}
}
/**
* 提取当前帧中与局部map匹配上了的角点、平面点,加入同一集合
*/
void combineOptimizationCoeffs()
{
// 遍历当前帧角点集合,提取出与局部map匹配上了的角点
for (int i = 0; i < laserCloudCornerLastDSNum; ++i){
if (laserCloudOriCornerFlag[i] == true){
laserCloudOri->push_back(laserCloudOriCornerVec[i]);
coeffSel->push_back(coeffSelCornerVec[i]);
}
}
// 遍历当前帧平面点集合,提取出与局部map匹配上了的平面点
for (int i = 0; i < laserCloudSurfLastDSNum; ++i){
if (laserCloudOriSurfFlag[i] == true){
laserCloudOri->push_back(laserCloudOriSurfVec[i]);
coeffSel->push_back(coeffSelSurfVec[i]);
}
}
// 清空标记
std::fill(laserCloudOriCornerFlag.begin(), laserCloudOriCornerFlag.end(), false);
std::fill(laserCloudOriSurfFlag.begin(), laserCloudOriSurfFlag.end(), false);
}
/**
* scan-to-map优化
* 对匹配特征点计算Jacobian矩阵,观测值为特征点到直线、平面的距离,构建高斯牛顿方程,迭代优化当前位姿,存transformTobeMapped
* 公式推导:todo
*/
bool LMOptimization(int iterCount)
{
// This optimization is from the original loam_velodyne by Ji Zhang, need to cope with coordinate transformation
// lidar <- camera --- camera <- lidar
// x = z --- x = y
// y = x --- y = z
// z = y --- z = x
// roll = yaw --- roll = pitch
// pitch = roll --- pitch = yaw
// yaw = pitch --- yaw = roll
// lidar -> camera
float srx = sin(transformTobeMapped[1]);
float crx = cos(transformTobeMapped[1]);
float sry = sin(transformTobeMapped[2]);
float cry = cos(transformTobeMapped[2]);
float srz = sin(transformTobeMapped[0]);
float crz = cos(transformTobeMapped[0]);
// 当前帧匹配特征点数太少
int laserCloudSelNum = laserCloudOri->size();
if (laserCloudSelNum < 50) {
return false;
}
cv::Mat matA(laserCloudSelNum, 6, CV_32F, cv::Scalar::all(0));
cv::Mat matAt(6, laserCloudSelNum, CV_32F, cv::Scalar::all(0));
cv::Mat matAtA(6, 6, CV_32F, cv::Scalar::all(0));
cv::Mat matB(laserCloudSelNum, 1, CV_32F, cv::Scalar::all(0));
cv::Mat matAtB(6, 1, CV_32F, cv::Scalar::all(0));
cv::Mat matX(6, 1, CV_32F, cv::Scalar::all(0));
PointType pointOri, coeff;
// 遍历匹配特征点,构建Jacobian矩阵
for (int i = 0; i < laserCloudSelNum; i++) {
// lidar -> camera todo
pointOri.x = laserCloudOri->points[i].y;
pointOri.y = laserCloudOri->points[i].z;
pointOri.z = laserCloudOri->points[i].x;
// lidar -> camera
coeff.x = coeffSel->points[i].y;
coeff.y = coeffSel->points[i].z;
coeff.z = coeffSel->points[i].x;
coeff.intensity = coeffSel->points[i].intensity;
// in camera
float arx = (crx*sry*srz*pointOri.x + crx*crz*sry*pointOri.y - srx*sry*pointOri.z) * coeff.x
+ (-srx*srz*pointOri.x - crz*srx*pointOri.y - crx*pointOri.z) * coeff.y
+ (crx*cry*srz*pointOri.x + crx*cry*crz*pointOri.y - cry*srx*pointOri.z) * coeff.z;
float ary = ((cry*srx*srz - crz*sry)*pointOri.x
+ (sry*srz + cry*crz*srx)*pointOri.y + crx*cry*pointOri.z) * coeff.x
+ ((-cry*crz - srx*sry*srz)*pointOri.x
+ (cry*srz - crz*srx*sry)*pointOri.y - crx*sry*pointOri.z) * coeff.z;
float arz = ((crz*srx*sry - cry*srz)*pointOri.x + (-cry*crz-srx*sry*srz)*pointOri.y)*coeff.x
+ (crx*crz*pointOri.x - crx*srz*pointOri.y) * coeff.y
+ ((sry*srz + cry*crz*srx)*pointOri.x + (crz*sry-cry*srx*srz)*pointOri.y)*coeff.z;
// lidar -> camera
matA.at<float>(i, 0) = arz;
matA.at<float>(i, 1) = arx;
matA.at<float>(i, 2) = ary;
matA.at<float>(i, 3) = coeff.z;
matA.at<float>(i, 4) = coeff.x;
matA.at<float>(i, 5) = coeff.y;
// 点到直线距离、平面距离,作为观测值
matB.at<float>(i, 0) = -coeff.intensity;
}
cv::transpose(matA, matAt);
matAtA = matAt * matA;
matAtB = matAt * matB;
// J^T·J·delta_x = -J^T·f 高斯牛顿
cv::solve(matAtA, matAtB, matX, cv::DECOMP_QR);
// 首次迭代,检查近似Hessian矩阵(J^T·J)是否退化,或者称为奇异,行列式值=0 todo
if (iterCount == 0) {
cv::Mat matE(1, 6, CV_32F, cv::Scalar::all(0));
cv::Mat matV(6, 6, CV_32F, cv::Scalar::all(0));
cv::Mat matV2(6, 6, CV_32F, cv::Scalar::all(0));
cv::eigen(matAtA, matE, matV);
matV.copyTo(matV2);
isDegenerate = false;
float eignThre[6] = {100, 100, 100, 100, 100, 100};
for (int i = 5; i >= 0; i--) {
if (matE.at<float>(0, i) < eignThre[i]) {
for (int j = 0; j < 6; j++) {
matV2.at<float>(i, j) = 0;
}
isDegenerate = true;
} else {
break;
}
}
matP = matV.inv() * matV2;
}
if (isDegenerate)
{
cv::Mat matX2(6, 1, CV_32F, cv::Scalar::all(0));
matX.copyTo(matX2);
matX = matP * matX2;
}
// 更新当前位姿 x = x + delta_x
transformTobeMapped[0] += matX.at<float>(0, 0);
transformTobeMapped[1] += matX.at<float>(1, 0);
transformTobeMapped[2] += matX.at<float>(2, 0);
transformTobeMapped[3] += matX.at<float>(3, 0);
transformTobeMapped[4] += matX.at<float>(4, 0);
transformTobeMapped[5] += matX.at<float>(5, 0);
float deltaR = sqrt(
pow(pcl::rad2deg(matX.at<float>(0, 0)), 2) +
pow(pcl::rad2deg(matX.at<float>(1, 0)), 2) +
pow(pcl::rad2deg(matX.at<float>(2, 0)), 2));
float deltaT = sqrt(
pow(matX.at<float>(3, 0) * 100, 2) +
pow(matX.at<float>(4, 0) * 100, 2) +
pow(matX.at<float>(5, 0) * 100, 2));
// delta_x很小,认为收敛
if (deltaR < 0.05 && deltaT < 0.05) {
return true;
}
return false;
}
/**
* scan-to-map优化当前帧位姿
* 1、要求当前帧特征点数量足够多,且匹配的点数够多,才执行优化
* 2、迭代30次(上限)优化
* 1) 当前激光帧角点寻找局部map匹配点
* a.更新当前帧位姿,将当前帧角点坐标变换到map系下,在局部map中查找5个最近点,距离小于1m,且5个点构成直线(用距离中心点的协方差矩阵,特征值进行判断),则认为匹配上了
* b.计算当前帧角点到直线的距离、垂线的单位向量,存储为角点参数
* 2) 当前激光帧平面点寻找局部map匹配点
* a.更新当前帧位姿,将当前帧平面点坐标变换到map系下,在局部map中查找5个最近点,距离小于1m,且5个点构成平面(最小二乘拟合平面),则认为匹配上了
* b.计算当前帧平面点到平面的距离、垂线的单位向量,存储为平面点参数
* 3) 提取当前帧中与局部map匹配上了的角点、平面点,加入同一集合
* 4) 对匹配特征点计算Jacobian矩阵,观测值为特征点到直线、平面的距离,构建高斯牛顿方程,迭代优化当前位姿,存transformTobeMapped
* 3、用imu原始RPY数据与scan-to-map优化后的位姿进行加权融合,更新当前帧位姿的roll、pitch,约束z坐标
*/
void scan2MapOptimization()
{
// 要求有关键帧
if (cloudKeyPoses3D->points.empty())
return;
// 当前激光帧的角点、平面点数量足够多
if (laserCloudCornerLastDSNum > edgeFeatureMinValidNum && laserCloudSurfLastDSNum > surfFeatureMinValidNum)
{
// kdtree输入为局部map点云
kdtreeCornerFromMap->setInputCloud(laserCloudCornerFromMapDS);
kdtreeSurfFromMap->setInputCloud(laserCloudSurfFromMapDS);
// 迭代30次
for (int iterCount = 0; iterCount < 30; iterCount++)
{
// 每次迭代清空特征点集合
laserCloudOri->clear();
coeffSel->clear();
// 当前激光帧角点寻找局部map匹配点
// 1、更新当前帧位姿,将当前帧角点坐标变换到map系下,在局部map中查找5个最近点,距离小于1m,且5个点构成直线(用距离中心点的协方差矩阵,特征值进行判断),则认为匹配上了
// 2、计算当前帧角点到直线的距离、垂线的单位向量,存储为角点参数
cornerOptimization();
// 当前激光帧平面点寻找局部map匹配点
// 1、更新当前帧位姿,将当前帧平面点坐标变换到map系下,在局部map中查找5个最近点,距离小于1m,且5个点构成平面(最小二乘拟合平面),则认为匹配上了
// 2、计算当前帧平面点到平面的距离、垂线的单位向量,存储为平面点参数
surfOptimization();
// 提取当前帧中与局部map匹配上了的角点、平面点,加入同一集合
combineOptimizationCoeffs();
// scan-to-map优化
// 对匹配特征点计算Jacobian矩阵,观测值为特征点到直线、平面的距离,构建高斯牛顿方程,迭代优化当前位姿,存transformTobeMapped
if (LMOptimization(iterCount) == true)
break;
}
// 用imu原始RPY数据与scan-to-map优化后的位姿进行加权融合,更新当前帧位姿的roll、pitch,约束z坐标
transformUpdate();
} else {
ROS_WARN("Not enough features! Only %d edge and %d planar features available.", laserCloudCornerLastDSNum, laserCloudSurfLastDSNum);
}
}
/**
* 用imu原始RPY数据与scan-to-map优化后的位姿进行加权融合,更新当前帧位姿的roll、pitch,约束z坐标
*/
void transformUpdate()
{
if (cloudInfo.imuAvailable == true)
{
// 俯仰角小于1.4
if (std::abs(cloudInfo.imuPitchInit) < 1.4)
{
double imuWeight = imuRPYWeight;
tf::Quaternion imuQuaternion;
tf::Quaternion transformQuaternion;
double rollMid, pitchMid, yawMid;
// roll角求加权均值,用scan-to-map优化得到的位姿与imu原始RPY数据,进行加权平均
transformQuaternion.setRPY(transformTobeMapped[0], 0, 0);
imuQuaternion.setRPY(cloudInfo.imuRollInit, 0, 0);
tf::Matrix3x3(transformQuaternion.slerp(imuQuaternion, imuWeight)).getRPY(rollMid, pitchMid, yawMid);
transformTobeMapped[0] = rollMid;
// pitch角求加权均值,用scan-to-map优化得到的位姿与imu原始RPY数据,进行加权平均
transformQuaternion.setRPY(0, transformTobeMapped[1], 0);
imuQuaternion.setRPY(0, cloudInfo.imuPitchInit, 0);
tf::Matrix3x3(transformQuaternion.slerp(imuQuaternion, imuWeight)).getRPY(rollMid, pitchMid, yawMid);
transformTobeMapped[1] = pitchMid;
}
}
// 更新当前帧位姿的roll, pitch, z坐标;因为是小车,roll、pitch是相对稳定的,不会有很大变动,一定程度上可以信赖imu的数据,z是进行高度约束
transformTobeMapped[0] = constraintTransformation(transformTobeMapped[0], rotation_tollerance);
transformTobeMapped[1] = constraintTransformation(transformTobeMapped[1], rotation_tollerance);
transformTobeMapped[5] = constraintTransformation(transformTobeMapped[5], z_tollerance);
// 当前帧位姿
incrementalOdometryAffineBack = trans2Affine3f(transformTobeMapped);
}
/**
* 值约束
*/
float constraintTransformation(float value, float limit)
{
if (value < -limit)
value = -limit;
if (value > limit)
value = limit;
return value;
}
/**
* 计算当前帧与前一帧位姿变换,如果变化太小,不设为关键帧,反之设为关键帧
*/
bool saveFrame()
{
if (cloudKeyPoses3D->points.empty())
return true;
// 前一帧位姿
Eigen::Affine3f transStart = pclPointToAffine3f(cloudKeyPoses6D->back());
// 当前帧位姿
Eigen::Affine3f transFinal = pcl::getTransformation(transformTobeMapped[3], transformTobeMapped[4], transformTobeMapped[5],
transformTobeMapped[0], transformTobeMapped[1], transformTobeMapped[2]);
// 位姿变换增量
Eigen::Affine3f transBetween = transStart.inverse() * transFinal;
float x, y, z, roll, pitch, yaw;
pcl::getTranslationAndEulerAngles(transBetween, x, y, z, roll, pitch, yaw);
// 旋转和平移量都较小,当前帧不设为关键帧
if (abs(roll) < surroundingkeyframeAddingAngleThreshold &&
abs(pitch) < surroundingkeyframeAddingAngleThreshold &&
abs(yaw) < surroundingkeyframeAddingAngleThreshold &&
sqrt(x*x + y*y + z*z) < surroundingkeyframeAddingDistThreshold)
return false;
return true;
}
/**
* 添加激光里程计因子
*/
void addOdomFactor()
{
if (cloudKeyPoses3D->points.empty())
{
// 第一帧初始化先验因子
noiseModel::Diagonal::shared_ptr priorNoise = noiseModel::Diagonal::Variances((Vector(6) << 1e-2, 1e-2, M_PI*M_PI, 1e8, 1e8, 1e8).finished()); // rad*rad, meter*meter
gtSAMgraph.add(PriorFactor<Pose3>(0, trans2gtsamPose(transformTobeMapped), priorNoise));
// 变量节点设置初始值
initialEstimate.insert(0, trans2gtsamPose(transformTobeMapped));
}else{
// 添加激光里程计因子
noiseModel::Diagonal::shared_ptr odometryNoise = noiseModel::Diagonal::Variances((Vector(6) << 1e-6, 1e-6, 1e-6, 1e-4, 1e-4, 1e-4).finished());
gtsam::Pose3 poseFrom = pclPointTogtsamPose3(cloudKeyPoses6D->points.back());
gtsam::Pose3 poseTo = trans2gtsamPose(transformTobeMapped);
// 参数:前一帧id,当前帧id,前一帧与当前帧的位姿变换(作为观测值),噪声协方差
gtSAMgraph.add(BetweenFactor<Pose3>(cloudKeyPoses3D->size()-1, cloudKeyPoses3D->size(), poseFrom.between(poseTo), odometryNoise));
// 变量节点设置初始值
initialEstimate.insert(cloudKeyPoses3D->size(), poseTo);
}
}
/**
* 添加GPS因子
*/
void addGPSFactor()
{
if (gpsQueue.empty())
return;
// 如果没有关键帧,或者首尾关键帧距离小于5m,不添加gps因子
if (cloudKeyPoses3D->points.empty())
return;
else
{
if (pointDistance(cloudKeyPoses3D->front(), cloudKeyPoses3D->back()) < 5.0)
return;
}
// 位姿协方差很小,没必要加入GPS数据进行校正
if (poseCovariance(3,3) < poseCovThreshold && poseCovariance(4,4) < poseCovThreshold)
return;
static PointType lastGPSPoint;
while (!gpsQueue.empty())
{
// 删除当前帧0.2s之前的里程计
if (gpsQueue.front().header.stamp.toSec() < timeLaserInfoCur - 0.2)
{
gpsQueue.pop_front();
}
// 超过当前帧0.2s之后,退出
else if (gpsQueue.front().header.stamp.toSec() > timeLaserInfoCur + 0.2)
{
break;
}
else
{
nav_msgs::Odometry thisGPS = gpsQueue.front();
gpsQueue.pop_front();
// GPS噪声协方差太大,不能用
float noise_x = thisGPS.pose.covariance[0];
float noise_y = thisGPS.pose.covariance[7];
float noise_z = thisGPS.pose.covariance[14];
if (noise_x > gpsCovThreshold || noise_y > gpsCovThreshold)
continue;
// GPS里程计位置
float gps_x = thisGPS.pose.pose.position.x;
float gps_y = thisGPS.pose.pose.position.y;
float gps_z = thisGPS.pose.pose.position.z;
if (!useGpsElevation)
{
gps_z = transformTobeMapped[5];
noise_z = 0.01;
}
// (0,0,0)无效数据
if (abs(gps_x) < 1e-6 && abs(gps_y) < 1e-6)
continue;
// 每隔5m添加一个GPS里程计
PointType curGPSPoint;
curGPSPoint.x = gps_x;
curGPSPoint.y = gps_y;
curGPSPoint.z = gps_z;
if (pointDistance(curGPSPoint, lastGPSPoint) < 5.0)
continue;
else
lastGPSPoint = curGPSPoint;
// 添加GPS因子
gtsam::Vector Vector3(3);
Vector3 << max(noise_x, 1.0f), max(noise_y, 1.0f), max(noise_z, 1.0f);
noiseModel::Diagonal::shared_ptr gps_noise = noiseModel::Diagonal::Variances(Vector3);
gtsam::GPSFactor gps_factor(cloudKeyPoses3D->size(), gtsam::Point3(gps_x, gps_y, gps_z), gps_noise);
gtSAMgraph.add(gps_factor);
aLoopIsClosed = true;
break;
}
}
}
/**
* 添加闭环因子
*/
void addLoopFactor()
{
if (loopIndexQueue.empty())
return;
// 闭环队列
for (int i = 0; i < (int)loopIndexQueue.size(); ++i)
{
// 闭环边对应两帧的索引
int indexFrom = loopIndexQueue[i].first;
int indexTo = loopIndexQueue[i].second;
// 闭环边的位姿变换
gtsam::Pose3 poseBetween = loopPoseQueue[i];
gtsam::noiseModel::Diagonal::shared_ptr noiseBetween = loopNoiseQueue[i];
gtSAMgraph.add(BetweenFactor<Pose3>(indexFrom, indexTo, poseBetween, noiseBetween));
}
loopIndexQueue.clear();
loopPoseQueue.clear();
loopNoiseQueue.clear();
aLoopIsClosed = true;
}
/**
* 设置当前帧为关键帧并执行因子图优化
* 1、计算当前帧与前一帧位姿变换,如果变化太小,不设为关键帧,反之设为关键帧
* 2、添加激光里程计因子、GPS因子、闭环因子
* 3、执行因子图优化
* 4、得到当前帧优化后位姿,位姿协方差
* 5、添加cloudKeyPoses3D,cloudKeyPoses6D,更新transformTobeMapped,添加当前关键帧的角点、平面点集合
*/
void saveKeyFramesAndFactor()
{
// 计算当前帧与前一帧位姿变换,如果变化太小,不设为关键帧,反之设为关键帧
if (saveFrame() == false)
return;
// 激光里程计因子
addOdomFactor();
// GPS因子
addGPSFactor();
// 闭环因子
addLoopFactor();
// cout << "****************************************************" << endl;
// gtSAMgraph.print("GTSAM Graph:\n");
// 执行优化
isam->update(gtSAMgraph, initialEstimate);
isam->update();
if (aLoopIsClosed == true)
{
isam->update();
isam->update();
isam->update();
isam->update();
isam->update();
}
// update之后要清空一下保存的因子图,注:历史数据不会清掉,ISAM保存起来了
gtSAMgraph.resize(0);
initialEstimate.clear();
PointType thisPose3D;
PointTypePose thisPose6D;
Pose3 latestEstimate;
// 优化结果
isamCurrentEstimate = isam->calculateEstimate();
// 当前帧位姿结果
latestEstimate = isamCurrentEstimate.at<Pose3>(isamCurrentEstimate.size()-1);
// cout << "****************************************************" << endl;
// isamCurrentEstimate.print("Current estimate: ");
// cloudKeyPoses3D加入当前帧位姿
thisPose3D.x = latestEstimate.translation().x();
thisPose3D.y = latestEstimate.translation().y();
thisPose3D.z = latestEstimate.translation().z();
// 索引
thisPose3D.intensity = cloudKeyPoses3D->size();
cloudKeyPoses3D->push_back(thisPose3D);
// cloudKeyPoses6D加入当前帧位姿
thisPose6D.x = thisPose3D.x;
thisPose6D.y = thisPose3D.y;
thisPose6D.z = thisPose3D.z;
thisPose6D.intensity = thisPose3D.intensity ;
thisPose6D.roll = latestEstimate.rotation().roll();
thisPose6D.pitch = latestEstimate.rotation().pitch();
thisPose6D.yaw = latestEstimate.rotation().yaw();
thisPose6D.time = timeLaserInfoCur;
cloudKeyPoses6D->push_back(thisPose6D);
// cout << "****************************************************" << endl;
// cout << "Pose covariance:" << endl;
// cout << isam->marginalCovariance(isamCurrentEstimate.size()-1) << endl << endl;
// 位姿协方差
poseCovariance = isam->marginalCovariance(isamCurrentEstimate.size()-1);
// transformTobeMapped更新当前帧位姿
transformTobeMapped[0] = latestEstimate.rotation().roll();
transformTobeMapped[1] = latestEstimate.rotation().pitch();
transformTobeMapped[2] = latestEstimate.rotation().yaw();
transformTobeMapped[3] = latestEstimate.translation().x();
transformTobeMapped[4] = latestEstimate.translation().y();
transformTobeMapped[5] = latestEstimate.translation().z();
// 当前帧激光角点、平面点,降采样集合
pcl::PointCloud<PointType>::Ptr thisCornerKeyFrame(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr thisSurfKeyFrame(new pcl::PointCloud<PointType>());
pcl::copyPointCloud(*laserCloudCornerLastDS, *thisCornerKeyFrame);
pcl::copyPointCloud(*laserCloudSurfLastDS, *thisSurfKeyFrame);
// 保存特征点降采样集合
cornerCloudKeyFrames.push_back(thisCornerKeyFrame);
surfCloudKeyFrames.push_back(thisSurfKeyFrame);
// 更新里程计轨迹
updatePath(thisPose6D);
}
/**
* 更新因子图中所有变量节点的位姿,也就是所有历史关键帧的位姿,更新里程计轨迹
*/
void correctPoses()
{
if (cloudKeyPoses3D->points.empty())
return;
if (aLoopIsClosed == true)
{
// 清空局部map
laserCloudMapContainer.clear();
// 清空里程计轨迹
globalPath.poses.clear();
// 更新因子图中所有变量节点的位姿,也就是所有历史关键帧的位姿
int numPoses = isamCurrentEstimate.size();
for (int i = 0; i < numPoses; ++i)
{
cloudKeyPoses3D->points[i].x = isamCurrentEstimate.at<Pose3>(i).translation().x();
cloudKeyPoses3D->points[i].y = isamCurrentEstimate.at<Pose3>(i).translation().y();
cloudKeyPoses3D->points[i].z = isamCurrentEstimate.at<Pose3>(i).translation().z();
cloudKeyPoses6D->points[i].x = cloudKeyPoses3D->points[i].x;
cloudKeyPoses6D->points[i].y = cloudKeyPoses3D->points[i].y;
cloudKeyPoses6D->points[i].z = cloudKeyPoses3D->points[i].z;
cloudKeyPoses6D->points[i].roll = isamCurrentEstimate.at<Pose3>(i).rotation().roll();
cloudKeyPoses6D->points[i].pitch = isamCurrentEstimate.at<Pose3>(i).rotation().pitch();
cloudKeyPoses6D->points[i].yaw = isamCurrentEstimate.at<Pose3>(i).rotation().yaw();
// 更新里程计轨迹
updatePath(cloudKeyPoses6D->points[i]);
}
aLoopIsClosed = false;
}
}
/**
* 更新里程计轨迹
*/
void updatePath(const PointTypePose& pose_in)
{
geometry_msgs::PoseStamped pose_stamped;
pose_stamped.header.stamp = ros::Time().fromSec(pose_in.time);
pose_stamped.header.frame_id = odometryFrame;
pose_stamped.pose.position.x = pose_in.x;
pose_stamped.pose.position.y = pose_in.y;
pose_stamped.pose.position.z = pose_in.z;
tf::Quaternion q = tf::createQuaternionFromRPY(pose_in.roll, pose_in.pitch, pose_in.yaw);
pose_stamped.pose.orientation.x = q.x();
pose_stamped.pose.orientation.y = q.y();
pose_stamped.pose.orientation.z = q.z();
pose_stamped.pose.orientation.w = q.w();
globalPath.poses.push_back(pose_stamped);
}
/**
* 发布激光里程计
*/
void publishOdometry()
{
// 发布激光里程计,odom等价map
nav_msgs::Odometry laserOdometryROS;
laserOdometryROS.header.stamp = timeLaserInfoStamp;
laserOdometryROS.header.frame_id = odometryFrame;
laserOdometryROS.child_frame_id = "odom_mapping";
laserOdometryROS.pose.pose.position.x = transformTobeMapped[3];
laserOdometryROS.pose.pose.position.y = transformTobeMapped[4];
laserOdometryROS.pose.pose.position.z = transformTobeMapped[5];
laserOdometryROS.pose.pose.orientation = tf::createQuaternionMsgFromRollPitchYaw(transformTobeMapped[0], transformTobeMapped[1], transformTobeMapped[2]);
pubLaserOdometryGlobal.publish(laserOdometryROS);
// 发布TF,odom->lidar
static tf::TransformBroadcaster br;
tf::Transform t_odom_to_lidar = tf::Transform(tf::createQuaternionFromRPY(transformTobeMapped[0], transformTobeMapped[1], transformTobeMapped[2]),
tf::Vector3(transformTobeMapped[3], transformTobeMapped[4], transformTobeMapped[5]));
tf::StampedTransform trans_odom_to_lidar = tf::StampedTransform(t_odom_to_lidar, timeLaserInfoStamp, odometryFrame, "lidar_link");
br.sendTransform(trans_odom_to_lidar);
// Publish odometry for ROS (incremental)
static bool lastIncreOdomPubFlag = false;
static nav_msgs::Odometry laserOdomIncremental;
static Eigen::Affine3f increOdomAffine;
if (lastIncreOdomPubFlag == false)
{
lastIncreOdomPubFlag = true;
laserOdomIncremental = laserOdometryROS;
increOdomAffine = trans2Affine3f(transformTobeMapped);
} else {
// 当前帧与前一帧之间的位姿变换
Eigen::Affine3f affineIncre = incrementalOdometryAffineFront.inverse() * incrementalOdometryAffineBack;
// 还是当前帧位姿(打印一下数据,可以看到与激光里程计的位姿transformTobeMapped是一样的)
increOdomAffine = increOdomAffine * affineIncre;
float x, y, z, roll, pitch, yaw;
pcl::getTranslationAndEulerAngles (increOdomAffine, x, y, z, roll, pitch, yaw);
if (cloudInfo.imuAvailable == true)
{
if (std::abs(cloudInfo.imuPitchInit) < 1.4)
{
double imuWeight = 0.1;
tf::Quaternion imuQuaternion;
tf::Quaternion transformQuaternion;
double rollMid, pitchMid, yawMid;
// roll姿态角加权平均
transformQuaternion.setRPY(roll, 0, 0);
imuQuaternion.setRPY(cloudInfo.imuRollInit, 0, 0);
tf::Matrix3x3(transformQuaternion.slerp(imuQuaternion, imuWeight)).getRPY(rollMid, pitchMid, yawMid);
roll = rollMid;
// pitch姿态角加权平均
transformQuaternion.setRPY(0, pitch, 0);
imuQuaternion.setRPY(0, cloudInfo.imuPitchInit, 0);
tf::Matrix3x3(transformQuaternion.slerp(imuQuaternion, imuWeight)).getRPY(rollMid, pitchMid, yawMid);
pitch = pitchMid;
}
}
laserOdomIncremental.header.stamp = timeLaserInfoStamp;
laserOdomIncremental.header.frame_id = odometryFrame;
laserOdomIncremental.child_frame_id = "odom_mapping";
laserOdomIncremental.pose.pose.position.x = x;
laserOdomIncremental.pose.pose.position.y = y;
laserOdomIncremental.pose.pose.position.z = z;
laserOdomIncremental.pose.pose.orientation = tf::createQuaternionMsgFromRollPitchYaw(roll, pitch, yaw);
if (isDegenerate)
laserOdomIncremental.pose.covariance[0] = 1;
else
laserOdomIncremental.pose.covariance[0] = 0;
}
pubLaserOdometryIncremental.publish(laserOdomIncremental);
}
/**
* 发布里程计、点云、轨迹
* 1、发布历史关键帧位姿集合
* 2、发布局部map的降采样平面点集合
* 3、发布历史帧(累加的)的角点、平面点降采样集合
* 4、发布里程计轨迹
*/
void publishFrames()
{
if (cloudKeyPoses3D->points.empty())
return;
// 发布历史关键帧位姿集合
publishCloud(&pubKeyPoses, cloudKeyPoses3D, timeLaserInfoStamp, odometryFrame);
// 发布局部map的降采样平面点集合
publishCloud(&pubRecentKeyFrames, laserCloudSurfFromMapDS, timeLaserInfoStamp, odometryFrame);
// 发布历史帧(累加的)的角点、平面点降采样集合
if (pubRecentKeyFrame.getNumSubscribers() != 0)
{
pcl::PointCloud<PointType>::Ptr cloudOut(new pcl::PointCloud<PointType>());
PointTypePose thisPose6D = trans2PointTypePose(transformTobeMapped);
*cloudOut += *transformPointCloud(laserCloudCornerLastDS, &thisPose6D);
*cloudOut += *transformPointCloud(laserCloudSurfLastDS, &thisPose6D);
publishCloud(&pubRecentKeyFrame, cloudOut, timeLaserInfoStamp, odometryFrame);
}
// 发布当前帧原始点云配准之后的点云
if (pubCloudRegisteredRaw.getNumSubscribers() != 0)
{
pcl::PointCloud<PointType>::Ptr cloudOut(new pcl::PointCloud<PointType>());
pcl::fromROSMsg(cloudInfo.cloud_deskewed, *cloudOut);
PointTypePose thisPose6D = trans2PointTypePose(transformTobeMapped);
*cloudOut = *transformPointCloud(cloudOut, &thisPose6D);
publishCloud(&pubCloudRegisteredRaw, cloudOut, timeLaserInfoStamp, odometryFrame);
}
// 发布里程计轨迹
if (pubPath.getNumSubscribers() != 0)
{
globalPath.header.stamp = timeLaserInfoStamp;
globalPath.header.frame_id = odometryFrame;
pubPath.publish(globalPath);
}
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "lio_sam");
mapOptimization MO;
ROS_INFO("\033[1;32m----> Map Optimization Started.\033[0m");
std::thread loopthread(&mapOptimization::loopClosureThread, &MO);
std::thread visualizeMapThread(&mapOptimization::visualizeGlobalMapThread, &MO);
ros::spin();
loopthread.join();
visualizeMapThread.join();
return 0;
}
参考文献
LIOSAM代码架构 - 知乎
SLAM学习笔记(二十)LIO-SAM流程及代码详解(最全)_zkk9527的博客-CSDN博客_lio-sam

![[附源码]Python计算机毕业设计Django基于vuejs的爱宠用品销售app](https://img-blog.csdnimg.cn/b72dff28b4d64dffb99c01984fc3105c.png)

![[附源码]Python计算机毕业设计Django交通事故档案管理系统](https://img-blog.csdnimg.cn/d369f1b7905846d1a7a2dfaf9ef566e0.png)

![[附源码]JAVA毕业设计家庭理财管理系统(系统+LW)](https://img-blog.csdnimg.cn/b2d7577c2805493aa0a064dfd01c41ad.png)