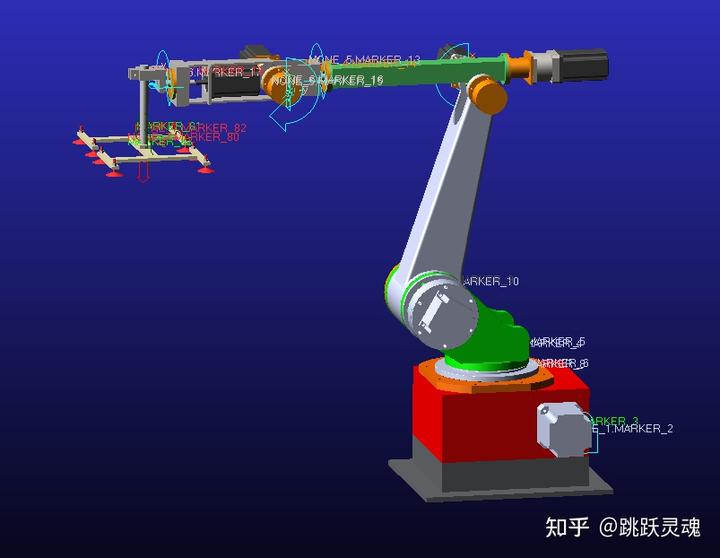
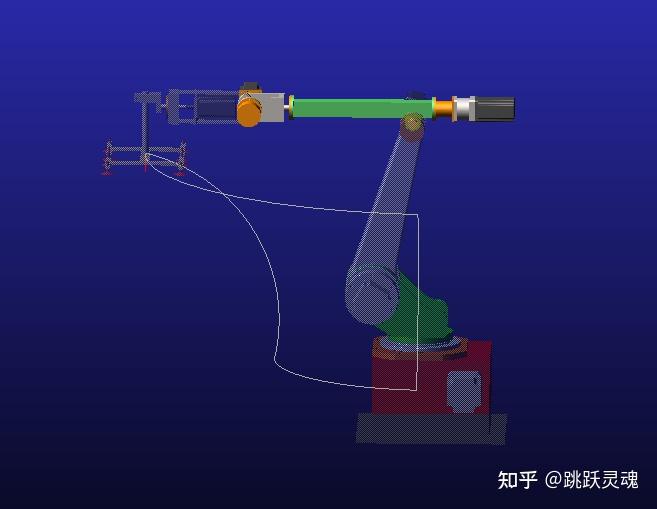
按照运动学仿真的类似步骤为机器人添加材料、运动副和关节驱动,给机器人手腕末端施加50N最大负载,仿真模型如图5-17。

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-AXYQVZPq-1684936426972)(data:image/svg+xml;utf8, )]
图5-17 机器人样机动力学模型
5.5.1 典型工况下的路径规划
如图5-18为机器人搬运物体的路径规划,由于腕转关节、腕摆关节和手转关节处于机器人手臂末端,关节所受的扭矩较小,同时为了降低求解难度,因此仿真时只设置了腰部回转关节、肩关节和肘关节。在1秒内肩关节和肘关节同时旋转90度,此时达到肩部关节的极限位置,之后腰部回转关节转过90度,最后各个关节相继复位。

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ZRa00Fmy-1684936426973)(data:image/svg+xml;utf8, )]
图5-18 典型工况下的路径规划
根据机器人作业任务的路径规划,各关节的驱动函数为:
J1:STEP( time , 1 , 0 , 1.6 , -90d )+STEP( time , 3.4 , 0 , 4 , 90d )
J2:STEP( time , 0 , 0 , 1 , -90d )+STEP( time , 2 , 0 , 3 , 90d )
J3:STEP( time , 0 , 0 , 1 , 90d )+STEP( time , 2 , 0 , 3 , -90d )
J4:0.0d * time
J5:0.0d * time
J6:0.0d * time
函数的意思为关节1在1到1.6秒逆转90度,在3.4到4秒正转90度;关节2在0到1秒逆向转动90度,在2到3秒正向转动90度;关节3在0到1秒逆向转动90度,在2到3秒正向转动90度;其他关节保持不动。
设置仿真的时间为4000毫秒,仿真的步数为500步,点击启动符号启动仿真。
5.5.2 动力学仿真曲线图
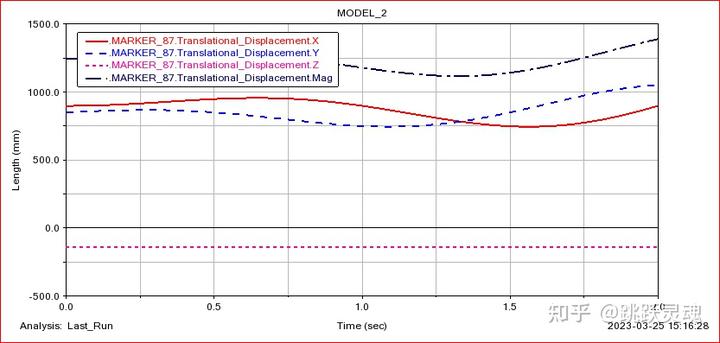
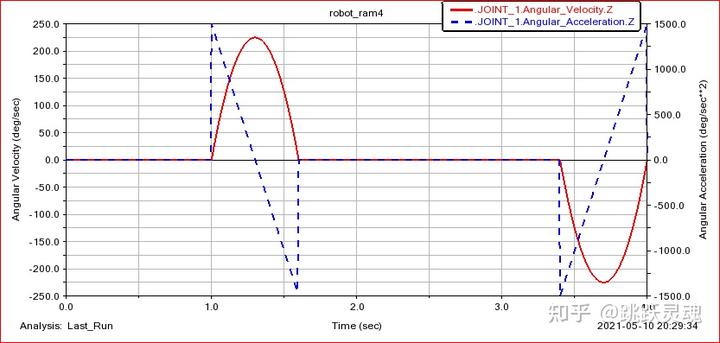
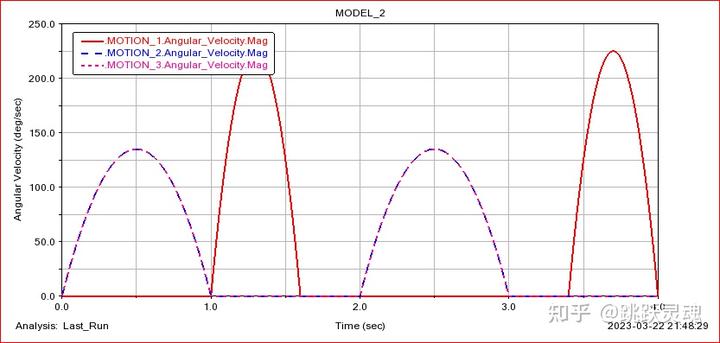
如图5-19和5-20,各个曲线变化过程中没有出现断点,说明本机器人结构总体的布局合理,机器人在工作过程中各关节能按照运动规划要求平稳运行。

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-N1waU5b4-1684936426973)(data:image/svg+xml;utf8, )]
图5-19 J1、J2、J3角位移曲线
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Sr8vSdow-1684936426974)(data:image/svg+xml;utf8, )]
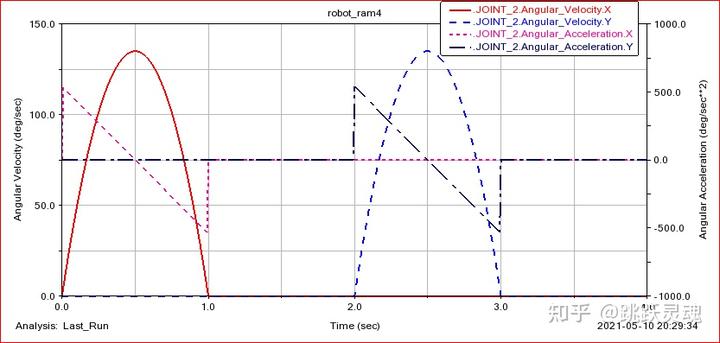
- J1的角速度和角加速度曲线
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-iSuOs67W-1684936426974)(data:image/svg+xml;utf8, )]
- J2的角速度和角加速度曲线

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-SZOuHicc-1684936426975)(data:image/svg+xml;utf8, )]
- J3的角速度和角加速度曲线
图5-20 关节角速度与角加速度
5.5.3 关节扭矩曲线图
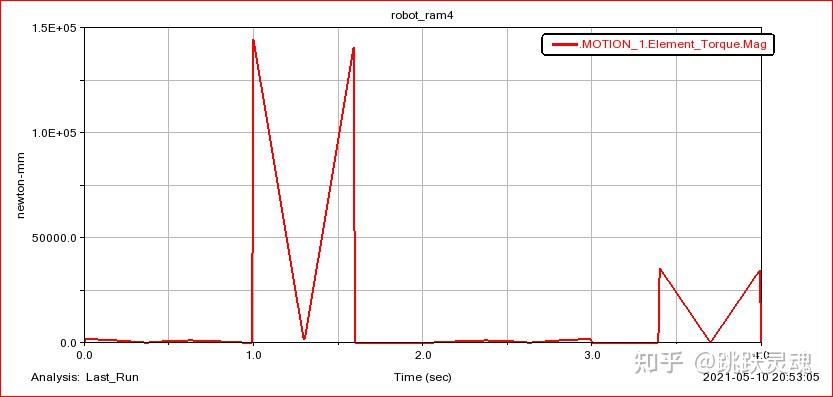
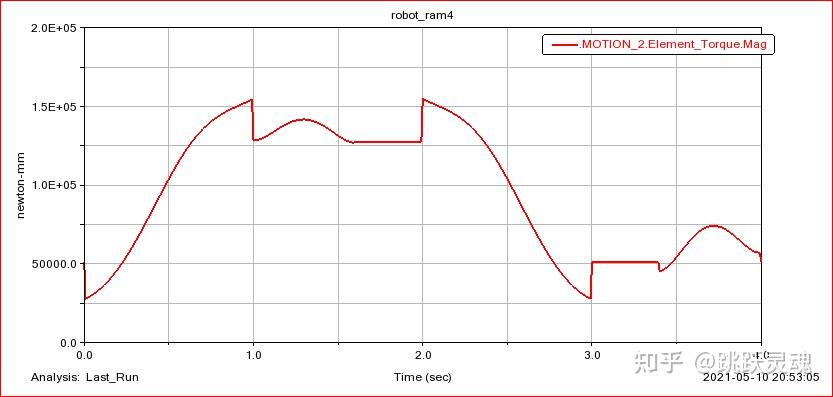
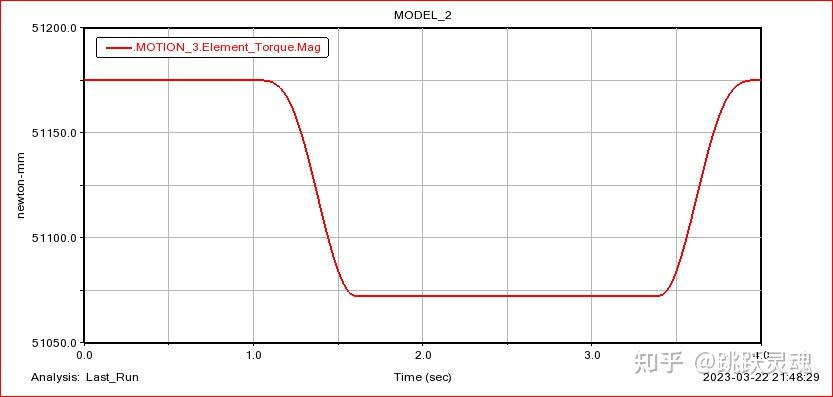
如图5-21,肩关节与肘关节处于同一竖直线上,两关节扭矩的值大小相等。在0到1秒之间,小臂和大臂逐渐展成水平状态,当完成展成水平状态时,肩关节扭矩达到最大值,同时腰部回转关节启动惯性力矩也达到最大值,在运动过程中,小臂全程处于水平状态下,理论上来说肘部关节扭矩应保持不变,但由图中曲线可以看出,肘部关节扭矩有较大波动,此外,肩关节扭矩在1到2秒和3到4秒也有较大波动,原因是机器人是一种存在复杂耦合关系的机械系统,各个关节的运动会对其他关节的运动造成一定的影响。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-069VXf35-1684936426975)(data:image/svg+xml;utf8, )]
(a)关节J1的扭矩变化图
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-lMFDry5G-1684936426976)(data:image/svg+xml;utf8, )]
(b)关节J2的扭矩变化图

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-vFFJMh4m-1684936426976)(data:image/svg+xml;utf8, )]
©关节J3的扭矩变化图
图5-21 关节扭矩图
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-okmavoej-1684936426977)(data:image/svg+xml;utf8, )]
机械臂admas建模
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ingVXbA7-1684936426978)(data:image/svg+xml;utf8, )]
工况下末端的路径规划
J1、J2、J3角位移曲线
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-HdtO4oal-1684936426978)(data:image/svg+xml;utf8, )]
J1、J2、J3角速度曲线

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-FNPFx7VP-1684936426979)(data:image/svg+xml;utf8, )]
J1、J2、J3角加速度曲线

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-0oC9J4yp-1684936426979)(data:image/svg+xml;utf8, )]
关节J1的扭矩变化图

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-jcqe4QqN-1684936426980)(data:image/svg+xml;utf8, )]
关节J2的扭矩变化图
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-uMZq5ei9-1684936426980)(data:image/svg+xml;utf8, )]
关节J3的扭矩变化图
三维模型admas仿真源文件下载见链接
(下载咨询链接:matlab正逆运动学分析与轨迹规划])